


关键词:牵引电机;趋近律;SMC;电磁转矩脉动;鲁棒性
1 引言
牵引电机作为动车组牵引变流系统的主要能量转换设备,直接关系到列车的运行状态、寿命和安全。牵引电机负载变化频繁,调速范围较大,在这个过程中会出现转速波动、转矩脉动等问题。电磁转矩脉动直接影响电机的使用寿命与运行安全。如何控制牵引电机快速、稳定的运行非常重要。同时牵引电机本身又是一个多变量、非线性、强耦合的被控对象,由于变量的强耦合关系使得直接调速很难实现[1]。通常情况下,牵引电机大量采用PI或PID闭环控制,它有对系统参数变化敏感、对负载变化的适应能力弱和抗干扰能力差等明显缺陷,不能完全适应控制要求较高的环境[2,3]。
滑模变结构控制(SMC)对参数变化及扰动不灵敏、无需系统在线辩识,实现简单等优点[4]。在电机出现负载突变及参数变化时,仍能保证良好的动态性能,但由于滑模变结构控制的不连续性,很容易使系统产生抖振,大大影响了其控制效果[5]。采用指数趋近律的方法可以改善趋近运动的动态品质,指数趋近律的趋近速度从较大值逐步减小到零缩短了趋近时间,而且使运动点到达切换面时速度很小,在保证快速趋近的同时削弱了抖振[6-7]。综上所述,本文提出了一种基于指数趋近律的滑模变结构控制算法,用于牵引电机的速度调节。与传统的基于PID调节的矢量控制控制进行对比,验证了该算法的有效性。
2 结合滑模变结构的转差矢量控制系统
结合滑模变结构的转差频率矢量控制系统的原理图如图1所示。该系统主电路设计为交-直-交的变流方式,包括四象限整流器、中间直流环节、SPWM电压源型逆变器以及三相异步电动机。控制电路采用了转差频率间接矢量控制,转速、磁链给定,并将传统的PI转速调节器替换为滑模变结构控制器,将得到的定子电流转矩分量、磁链分量变换为电压分量,通过坐标转换得到三相调制信号,经调制得到控制逆变器中IGBT的开关信号,从而得到变压变频的三相电,从而达到牵引电机的速度调节[8]。
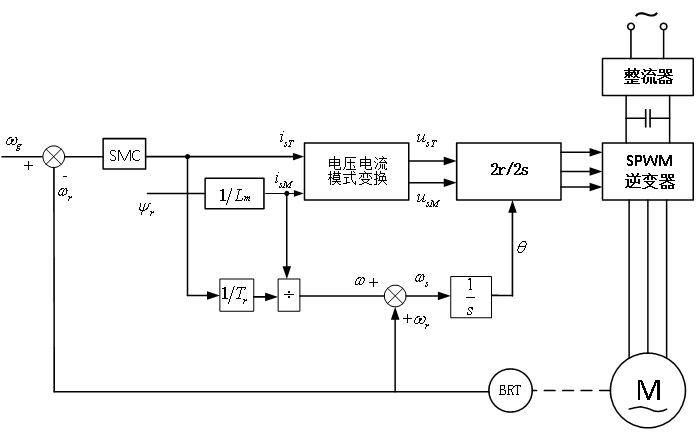
图1 结合滑模变结构的转差频率矢量控制系统
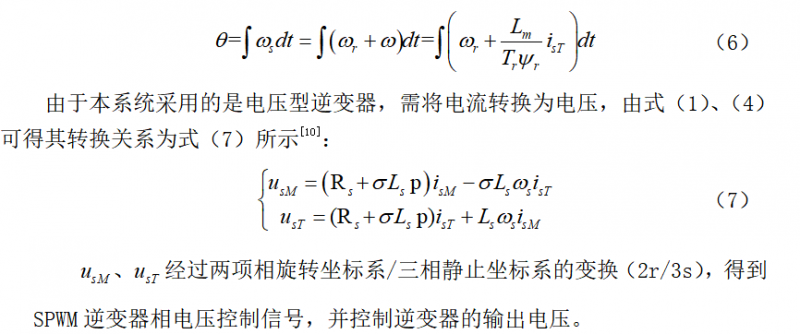
图1中牵引电机按转子磁链定向的同步旋转MT坐标系下的数学模型如公式(1)所示:
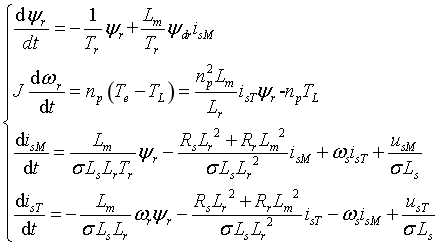 (1)
(1)
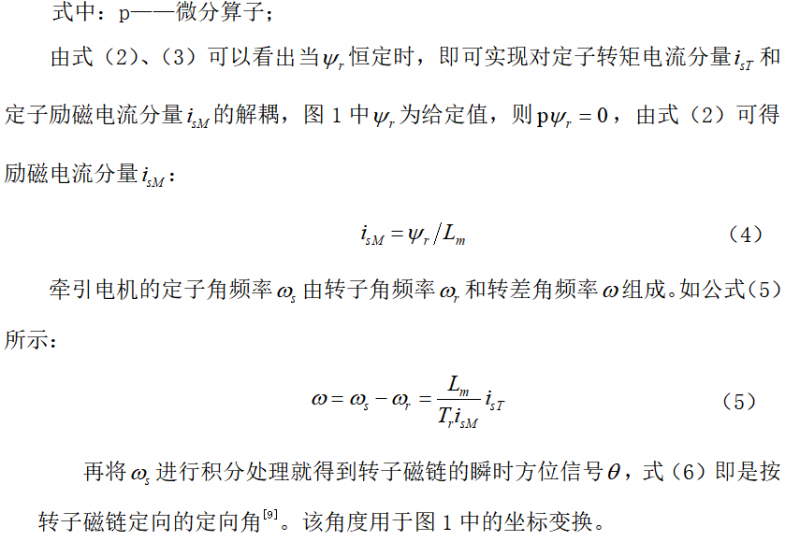
式中:
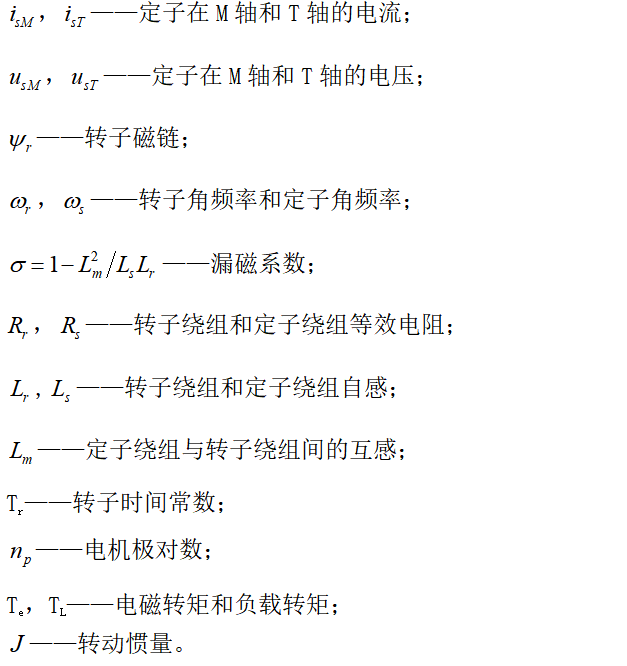
由公式(1)可得牵引电动机转子磁链以及电磁转矩方程式如式(2)、(3)所示:
3 基于趋近律的滑模变结构模块设计
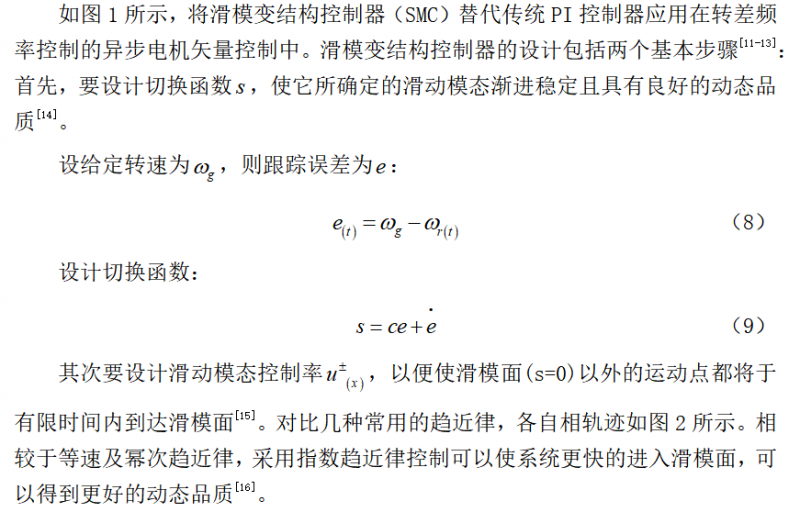
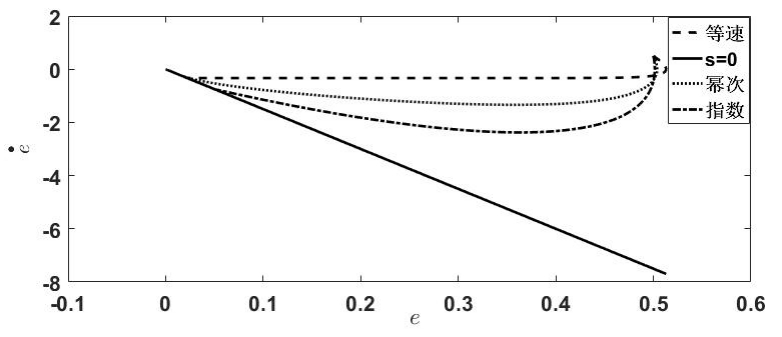
图2 滑模运动相轨迹曲线图
4 牵引电机控制仿真
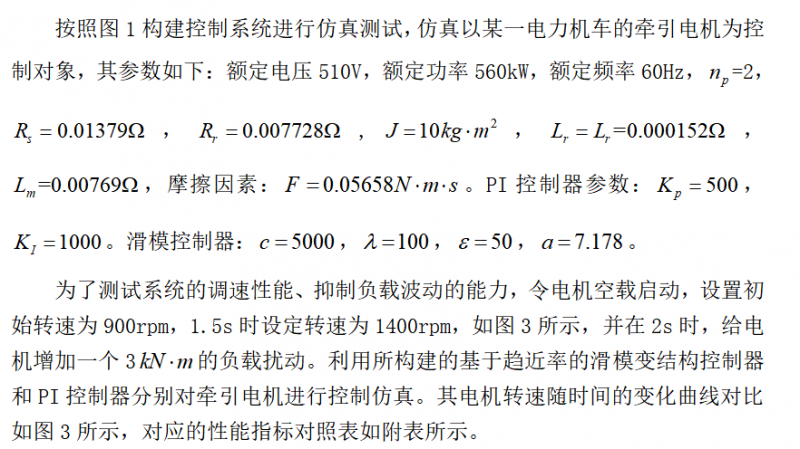
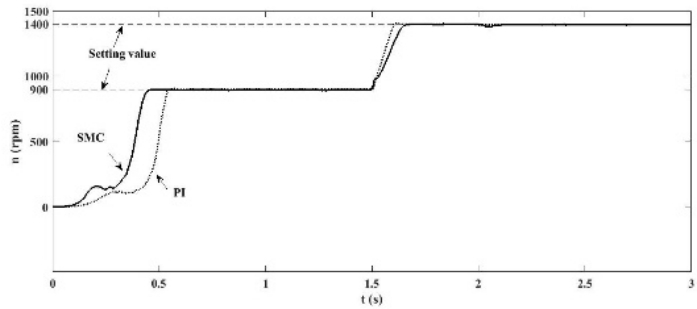
图3 电机转速波形
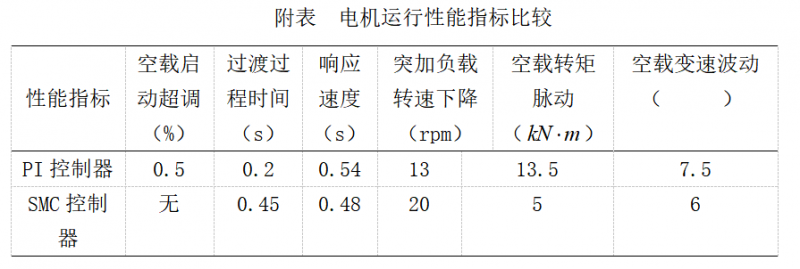
牵引电机的电磁转矩脉动大小决定了其寿命和运行安全,进而影响到列车的行车安全,所以有必要观察其电磁转矩的脉动情况。图4及附表描述了交流电机的电磁转矩特性,对比PI控制SMC控制器下的交流调速系统,在电机空载运行时能有效降低电机启动带来的脉动,且在速度突变时也能有效降低电机脉动,加载时能保证电磁转矩与外加负载大致相等,电磁转矩的脉动明显要小于PI控制下的脉动。
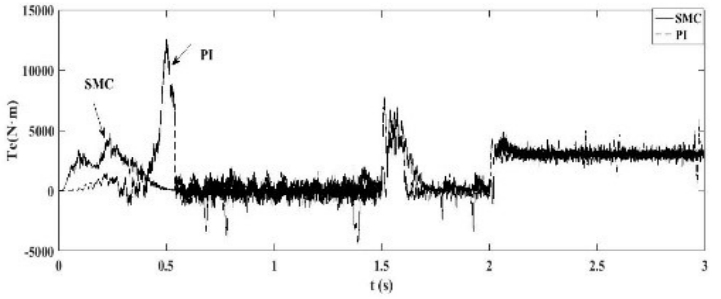
图4 电机电磁转矩波形
5 结论
通过对比分析选用了趋近速率更快的指数趋近律,同时为削弱滑模控制器固有的抖振现象,设计了滑模变结构控制器。仿真结果表明,与传统的PI速度调节器相比,基于指数趋近律的牵引电机滑模变结构控制有效降低了系统的超调量以及转矩脉动问题,提高了系统的调节精度,提高了电机的响应速度。通过对比仿真验证了此控制策略的可行性和有效性。




共0条 [查看全部] 网友评论