



关键词:五相永磁同步电机;五相逆变器;相邻四矢量SVPWM;矢量控制;有限集模型预测电流控制
1 引言
与传统的三相电机驱动系统相比,多相电机驱动系统具有如下优势[1-3]:1)转矩脉动幅值与电机相数成反比,电机振动和噪声减小;2)可实现低压大功率输出;3)多相电机具有冗余特性,系统可靠性较强。同时,多相电机具有更多的自由度,有利于电机本体优化设计以及高性能控制算法设计,提升电机功率密度并增大输出电磁转矩。因此,多相电机驱动系统更适合于轨道交通牵引、电动汽车、船舶电力推进等应用场合[4-6],研究多相电机驱动系统的高性能控制算法具有较强的工程应用价值。
为解决多相电机因变量间强耦合导致的控制难度大的问题,文献[7]提出多相坐标变换矩阵的方法,实现六相逆变器供电的感应电机解耦控制,文献[8]利用多相坐标变换理论,建立双三相感应电机数学模型,建立基波和谐波子空间的方程,并首次把磁场定向矢量控制的思想引入到多相电机驱动系统中,文献[9]建立并分析了五相逆变器的数学模型及其空间电压矢量理论,文献[10]基于电机dq轴下数学模型,提出了五相PMSM的直接转矩控制算法,并采用空间矢量脉宽调制替代传统的开关表,获得了较好的转速和转矩响应性能,文献[11]基于建立的同步旋转坐标系下五相PMSM数学模型,实现了电机交轴电流id=0的电流矢量解耦控制,但控制器执行模块采用的是简单的SPWM算法。
模型预测控制(Model Predictive Control,MPC) 算法由Linder A自2001年引入到电机控制中以来,得到了越来越广泛的研究[12]。其中,有限集模型预测控制依据被控对象的离散状态方程,预测出控制变量在控制集中电压矢量作用下的变化,并根据控制变量的预测值来计算目标函数值,最终选取使得目标函数值最小的电压矢量作为逆变器输出最优电压矢量,直接控制功率器件的开关动作。相较于传统的FOC和DTC算法,FCS-MPC算法原理简单且无PWM模块,易于在线实现。文献[13]针对五相逆变器和五相感应电机的FCS-MPC算法进行了仿真分析,文献[14]研究了六相感应电机的MPC算法并完成实验验证。但针对五相PMSM驱动系统的FCS-MPC算法研究较少。
本文以五相PMSM为被控对象,分析有限集模型预测电流控制算法及其数字化仿真实现。首先基于扩展Park变换矩阵,建立五相PMSM在两相旋转坐标系下的数学模型。然后借鉴矢量空间解耦控制的思想,设计出一种采用NFV-SVPWM算法的基波空间直轴电流id1=0矢量控制算法,为提升电流控制性能,研究了五相PMSM的FCS-MPCC,构造电机电流离散预测模型,并设计目标函数以实现对电机基波空间电流和三次谐波空间电流的同时控制。最后基于Matlab/Simulink完成五相PMSM控制系统的仿真建模和对比分析,仿真结果验证了本文分析与设计的正确性和有效性。
2 五相PMSM系统工作原理
2.1 五相永磁同步电机的数学模型
为简化五相PMSM数学模型的建立过程,一般作几点理想化假设[11]。在五相自然坐标系下,定子电压方程有
 (1)
(1)
式中,us为电机定子电压矢量,us=[uA,uB,uC,uD,uE];is为电机定子电流矢量,is=[iA,iB,iC,iD,iE];Rs为电机定子电阻,ys为电机定子磁链矢量。
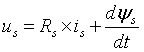
借鉴三相电机的坐标变换理论,可推导得出五相PMSM的扩展Park变换矩阵,如式(2)。
 (2)
(2)
式(2)中的扩展Park变换矩阵又称为双正交坐标变换,其中a=p2/5,q为转子磁场定向的d轴与定子绕组A轴轴线的空间电角度。式(2)中前两行对应d1-q1子空间,电机变量中的基波和10k±1(k=1,2,…)次谐波映射到此空间,并以角速度(10k±1)w旋转,参与机电能量转换。式(2)中第三、四行对应d3-q3子空间,电机变量中的3次和10k±3(k=1,2,…)次谐波映射到此空间,并以角速度(10k±3)w旋转,不参与机电能量转换。式(2)中第五行对应零序子空间。
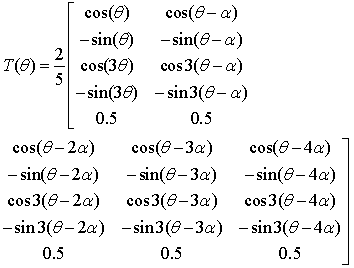
根据式(1)和式(2),可以推导得到五相PMSM在两相同步旋转坐标系下的定子电压方程:
 (3)
(3)
式中,w为同步旋转坐标系角速度,yf为电机转子永磁体磁链幅值。
根据电机学原理可知,在d1-q1子空间中电磁转矩表达式为
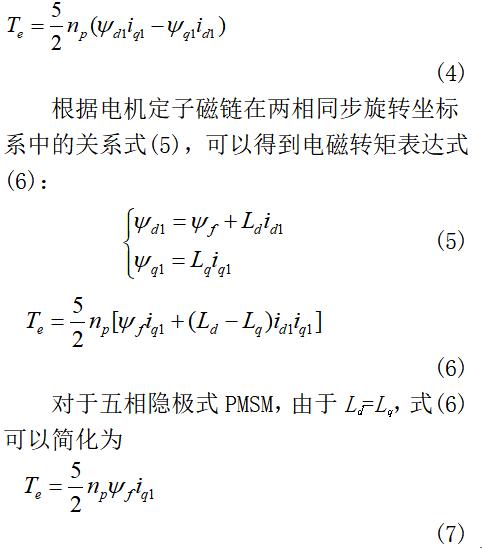
2.2 五相逆变器的工作原理
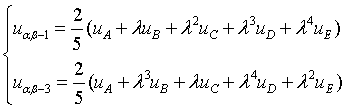
两电平五相逆变器具有32种开关组合,可输出30个有效电压矢量和2个零矢量。根据多维空间变换矩阵[7],可定义五相逆变器在基波空间a1-b1和三次谐波空间a3-b3的输出电压矢量:
 (8)
(8)
式中l=exp(j2p/5)。
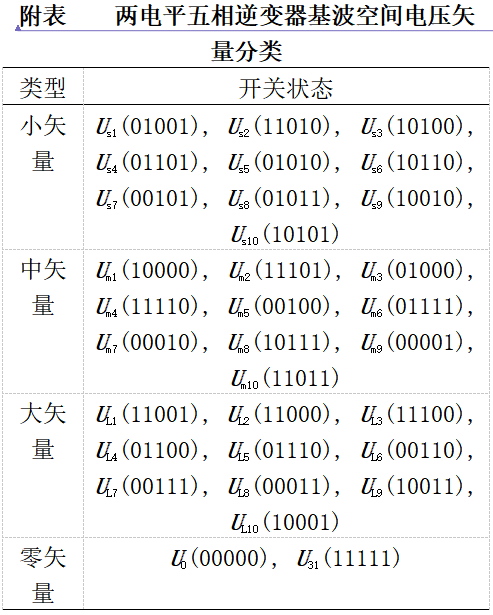
根据各桥臂开关状态的不同和电压矢量幅值的大小,可将合成矢量进行分类,具体见附表。
3 五相PMSM的矢量控制算法
3.1 id1=0矢量控制算法
根据交流电机电流矢量解耦控制思想,五相永磁同步电机输出电磁转矩与电机三次谐波空间的交直轴电流iq3、id3无关,见式(6),则令基波空间的直轴电流id1=0,直接控制交轴电流iq1实现电机转矩的控制。图1所示为本文设计的五相PMSM矢量控制算法原理框图,其主要特点如下:
(1)d1-q1子空间电流闭环控制,而d3-q3子空间开环控制,并令Uq3=Ud3=0以实现抑制三次谐波电流iq3、id3;
(2)相邻最大两矢量调制算法(NTV-SVPWM)简单且易于实现,但在三次谐波空间a3-b3中存在无法消除的谐波分量;本文设计了一种抑制三次空间谐波的相邻四矢量(NFV-SVPWM)算法。
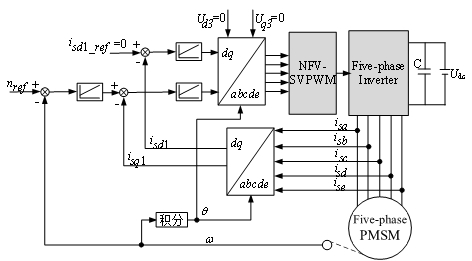
图1 五相PMSM矢量控制算法原理框图
3.2 相邻四矢量调制算法(NFV-SVPWM)
图1中采取的NFV-SVPWM算法,在基波空间a1-b1中选择相邻的两个大矢量UL、两个中矢量Um和两个零矢量对参考电压矢量进行合成。以第一扇区为例,选取相邻电压矢量UL1、UL2、Um1、Um2以及U0和U31。根据矢量合成原理,UL1和UL2会在三次谐波空间a3-b3中合成三次谐波电压矢量,而对应的Um1和Um2因矢量方向相反,会对a3-b3空间中三次谐波电压矢量产生抑制作用。
为使a3-b3空间中合成电压矢量为0,a1-b1空间的四个有效电压矢量的幅值和作用时间应满足:
 (9)
(9)
同时根据伏秒平衡原则可得:
 (10)
(10)
式中TL1、TL2、Tm1、Tm2分别为对应矢量的作用时间,Ts为开关周期,Uref为参考电压矢量。
根据式(9)、式(10)和平行四边形法则,可得各矢量作用时间如下:
 (11)
(11)
其他扇区各矢量作用时间依此类推,不再赘述。
4 五相PMSM模型预测电流控制算法
4.1 FCS-MPCC基本原理
有限集模型预测电流控制(FCS-MPCC)算法的基本原理:依据被控对象的离散状态方程,预测出控制变量在控制集中电压矢量作用下的变化,并根据控制变量的预测值来计算目标函数值,最终选取使得目标函数值最小的电压矢量作为逆变器输出最优电压矢量,直接控制功率器件的开关动作。本文五相PMSM的模型预测电流控制框图如图2所示,与矢量控制算法相似,基波空间的交轴电流iq1指令值由速度环PI调节器得到,且指令值iq3=id3=id1=0。不同于矢量控制算法的电流内环PI,FCS-MPCC电流调节器具有非线性控制特点,且电压矢量选择无需SVPWM模块。

图2 五相PMSM模型预测电流控制框图
4.2 电流预测
模型预测电流控制算法首先需要建立电机离散化数学模型,基于此预测下一时刻的电机状态变量。采用一阶欧拉离散法[12]可将式(3)改写为式(12)
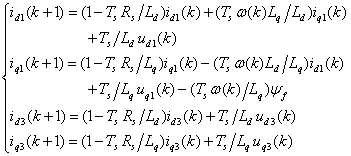 (12)
(12)
式中,k为当前时刻电机状态变量值,Ts为控制周期。id1(k+1)、iq1(k+1)、id3(k+1)、iq3(k+1)为下一时刻电机电流的预测值,id1(k)、iq1(k)、id3(k)、iq3(k)为当前控制周期电机电流采样值,ud1(k)、uq1(k)、ud3(k)、uq3(k)为当前控制周期电机侧电压矢量,w(k)为当前控制周期内同步电角速度。
根据式(12)可在线计算出电机电流的预测值。数字化实现时考虑离散计算精度、运算量和实际数字处理器固有的一拍延迟[12],可采取2阶欧拉离散法和延时补偿等方法。
4.3 电压矢量选择
当电机电流预测模型建立并确定计算步长Ts之后,系统控制性能直接取决于设计的目标函数。为实现对基波空间电流id1、iq1和三次谐波空间电流id3、iq3的同时控制,本文构造如下目标函数:
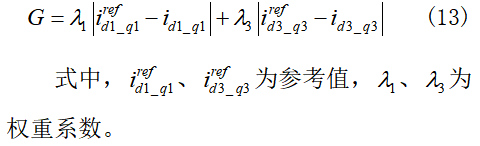
两电平五相逆变器可能输出的电压矢量见表1,为简化运算,可选取基波空间a1-b1中10个大矢量和零矢量作为有限控制集。利用式(12)可以预测有限控制集中电压矢量作用下的电流值,再根据预测值计算式(13)中的目标函数值,可将权重系数简化为1,最后选取使G值最小的电压矢量作为最优输出,直接控制逆变器功率器件的开关状态。
由于控制集中存在2个零矢量,当最优输出电压矢量为零矢量时,依据开关切换次数最少的原则来确定零矢量。
5 计算机仿真分析
为验证本文设计的五相PMSM矢量控制算法和模型预测电流控制算法(FCS-MPCC)的正确性和有效性,基于Matlab/Simulink搭建主电路和控制系统仿真模型。为方便控制器代码移植,利用s-function模块完成矢量控制算法和模型预测电流控制算法的C语言编程。仿真模型系统参数如下:直流侧电压Udc=380V,电机定子电阻Rs=3.8Ω,电机交直轴电感Ld=Lq=8.5mH,永磁体磁链yf=0.19Wb,极对数np=4,转动惯量J=0.2kg·m2。
5.1 稳态仿真结果
为验证本文五相PMSM系统控制算法的正确性,对比分析图1中矢量控制(FOC+NFV-SVPWM)算法和图2中模型预测电流控制(FCS-MPCC)算法的控制性能,给出了仿真模型稳态下的A相电流、电磁转矩波形,如图3所示。可以看到,图3(c)中电流波形正弦度更高,且转矩脉动明显小于图3(a)和图3(b)。矢量控制算法电流环性能取决于PI参数的合理设计,对比可知,图3(a)的控制器参数相比图3(b)具有更低的电流畸变率,但转矩幅值要小。
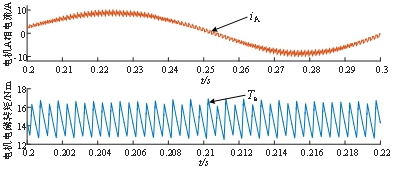
(a) FOC+NFV-SVPWM,d-q电流环P=1,I=20
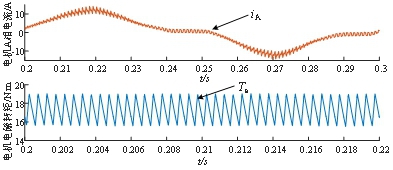
(b) FOC+NFV-SVPWM,d-q电流环P=1,I=100
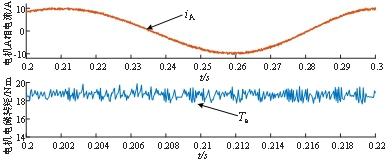
(c) FCS-MPCC
图3 五相PMSM稳态时电流、电磁转矩仿真波形
由图3中三组仿真波形可知,FCS-MPCC算法的电流和转矩稳态性能要优于FOC+NFV-SVPWM,同时可以看出二者在电机电流控制上的差异。为更直观表现出FCS-MPCC的非线性控制特点,图4给出了电机启动过程中A相电压仿真波形,并对比矢量控制中线性PI调节器的电压波形,此时SVPWM模块的开关频率为1kHz。
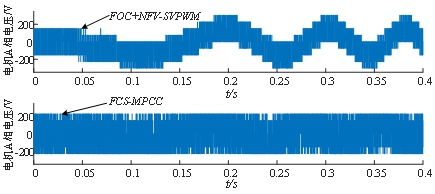
图4 五相PMSM启动过程A相电压仿真波形
5.2 动态仿真结果
为进一步分析图1中矢量控制算法和图2中模型预测电流控制算法的动态响应性能,仿真时先将目标速度设定在120rad/s,然后在0.7s将目标速度设定在-120rad/s,电机反转,并在1.6s将电机负载由5N.m增加到10N.m。图5给出了动态过程的五相PMSM基波空间d-q轴电流仿真波形,可以看到,图5(c)中FCS-MPCC算法d-q轴电流解耦效果明显较好,d轴电流采样值在整个动态过程中均保持恒定,且电流采样值iq1_feedback、id1_feedback能够精确跟踪电流指令值iq1_ref、id1_ref。然而图5(a)和图5(b)中的d-q轴电流控制均未实现完全解耦,电流跟踪精度相对较差,且与PI调节器参数关系很大。图5(a)中电流采样值iq1_feedback、id1_feedback与电流指令值iq1_ref、id1_ref存在明显的误差。
另外,因为图1中矢量控制算法对d3-q3子空间是电流开环控制,d1-q1子空间电流闭环控制,为抑制或消除输出电流中的三次谐波,PI调节器参数需要合理设计。对比图3(a)、图3(b)和图5(a)、图5(b)可知,基波空间电流id1、iq1跟踪效果较好的PI参数,电机电流畸变较严重,三次谐波含量较大。
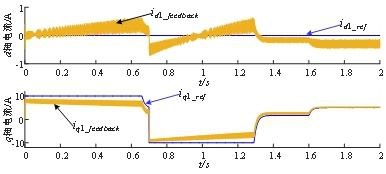
(a) FOC+NFV-SVPWM,d-q电流环P=1,I=20
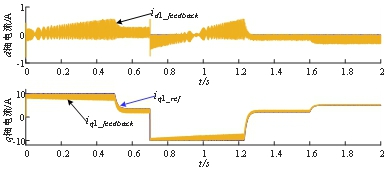
(b) FOC+NFV-SVPWM,d-q电流环P=1,I=100
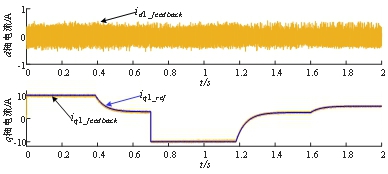
(c) FCS-MPCC
图5 五相PMSM基波空间d-q轴电流仿真波形
图6给出了对应的定子五相电流和电磁转矩仿真波形,可以看到图6(a)、图6(b)中矢量控制算法和图6(c)中模型预测电流控制算法功能实现正确,验证了理论分析与设计的有效性。通过对比分析,图6(a)中转矩输出最小,电机加/减速度最小,图6(b)中电流波形正弦度最差,三次谐波含量最大,而图6(c)中电流和转矩获得了最优的动态响应性能,进一步验证了本文模型预测电流控制算法的优越性。
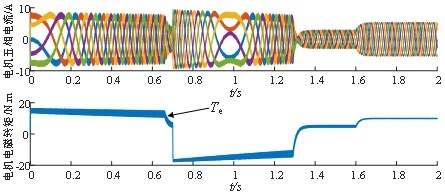
(a) FOC+NFV-SVPWM,d-q电流环P=1,I=20
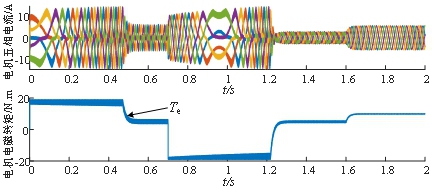
(b) FOC+NFV-SVPWM,d-q电流环P=1,I=100
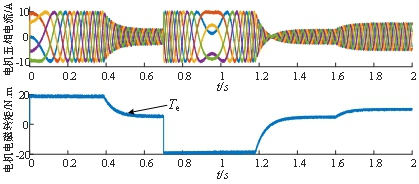
(c) FCS-MPCC
图6 五相PMSM定子五相电流、电磁转矩仿真波形
6 结论
本文以五相PMSM为被控对象,分析并设计了矢量控制算法和有限集模型预测电流控制算法,并通过搭建仿真模型验证了2种控制算法的正确性。通过仿真结果对比分析可得到,五相PMSM矢量控制(FOC+NFV-SVPWM)算法对d1-q1子空间电流闭环控制,但对d3-q3子空间是电流开环控制,导致电机输出电流中三次谐波含量受到电流环PI调节器参数影响很大,并影响电流跟踪的准确性。而本文设计的模型预测电流控制算法(FCS-MPCC)能完全实现d-q轴电流解耦控制,且同时对d1-q1子空间和d3-q3子空间电流完成闭环控制,具有优越的动静态响应性能。








共0条 [查看全部] 网友评论