


关键词:异步电机;矢量控制;预测电流控制;动态响应;鲁棒性

1 引言
异步电机矢量控制是一种模拟直流电动机的控制方式,将定子电流分解为可独立控制的励磁分量和转矩分量,具有较高的动态性能;通过数字处理器可进行实时控制;和目前控制性能较差的控制方法相比,成本几乎不用增加可实现高性能的控制方法,在工业应用场合得到了非常广泛的应用[1]。电流控制电压源逆变器的矢量控制,通过电流控制可使逆变器输出电流快速跟踪给定电流,因此此控制中不需要电流控制器,且比其它调制方法更为简单,对于给定的带宽和逆变器的给定直流电压,逆变器功率器件的开关频率会随着电动机参数的变化而变化,这是采用容差带电流控制逆变器的主要特点。由于工业应用中对异步电机的动态响应特性要求的日益增高,模型预测控制(MPC)在电力电子及电机驱动领域受到学者的广泛关注。MPC是一种非线性预测控制策略,处理非线性约束的适应能力强,它利用给定的价值函数作为优化准则,使得控制极具灵活性[2]。对于矢量控制方式下的转矩波动问题进行了讨论,提出了预测磁链控制解决磁链和转矩的波动,但是该预测算法对电机参数的敏感性较强,系统的鲁帮性较差[3]。
本文在讲述滞环电流控制,基于脉宽调制或空间矢量调制的线性控制原理的基础上,提出了一种基于预测电流控制的异步电机矢量控制方法,用模型预测控制代替传统的电流跟踪滞环控制器或基于空间矢量调制(SVPWM)的经典电流控制方案,对电流环采用预测控制以进一步提高动态性能。
2 异步电机矢量控制原理
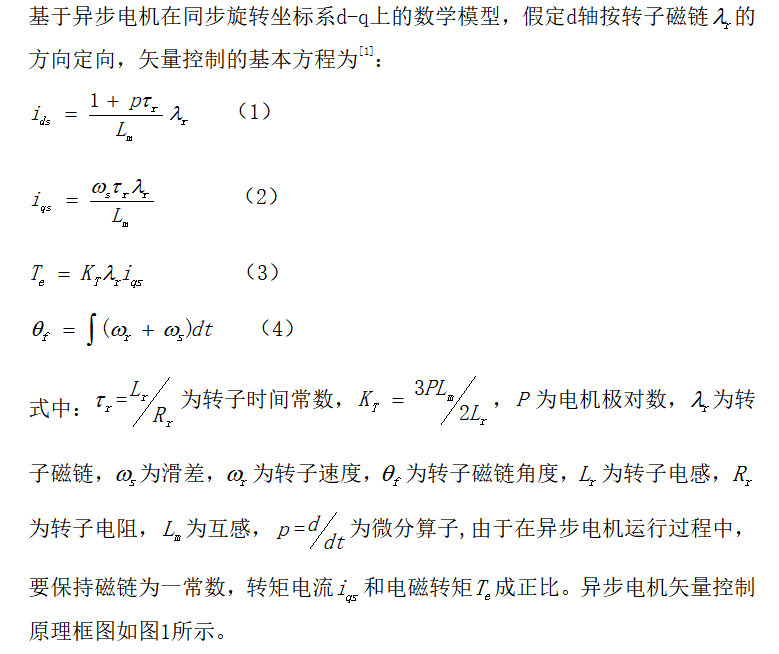
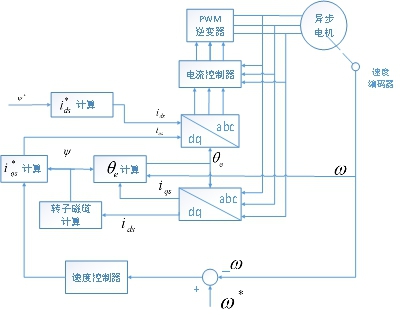
图1 异步电机矢量控制框图
3 传统的电流控制策略简介
在异步电机矢量控制系统中,有两种传统的控制方法得到了广泛的应用分别是滞环电流控制和基于PWM的线性控制方法。
3.1 滞环电流控制
滞环电流控制的基本思路:每当电流达到边界条件时,可改变逆变器的开关状态来确保电流处于滞环内部。使用滞环比较器将测得的各相电机定子电流与相应的参考电流进行比较,各比较器将确定相应的逆变器桥臂的开关状态,因此电机电流被强制在滞环带以内。这种方法在概念上比较简单,实施起来也不需要复杂的电路,而且滞环控制器的性能比较好,动态响应也非常快。开关频率将随着滞环宽度、电机参数和运行条件的变换而变化。由于变化的开关频率可导致谐振问题,这也是滞环控制的主要缺点之一,而且开关损耗也限制了滞环控制方法只在低功率领域的应用范围。
3.2 基于脉宽调制或空间矢量调制的线性控制
使用脉宽调制为逆变器功率开关产生控制信号,进而实现了非线性逆变器向线性的转换。这样的控制系统将使用一种线性控制器,最常见的选择方案是使用PI(比列积分)控制器。脉宽调制器将对参考电压与三角载波信号进行比较,比较器的输出则用于驱动逆变器的开关器件。PWM的一种变化方式被称为空间矢量调制(Space Vector Modulation)。为产生参考输出电压,这里使用了PI控制器来处理定子参考电流与电机定子电流测量值之间的误差。利用这种方法,再通过固定的载波信号即可获得恒定的开关频率。这种控制方案的性能取决于控制器的参数设计和参考电流频率。虽然PI控制器可确保连续参考信号的稳态误差为零,但应用于正弦信号时存在明显的误差。随着参考电流频率的增高,这种误差也随之变化,甚至无法满足某些应用领域的需求。
4 电流预测控制算法
两电平逆变器可以只产生8个开关状态,为了选择能够应用的合适的开关状态,须定义一种选择标准。这种标准定义为代价函数,代价函数用来评估被控变量的预测值。对每一种可能逆变器的开关状态,针对这些被控变量的未来值进行预测,然后确定使代价函数最小的状态。预测电流控制算法:
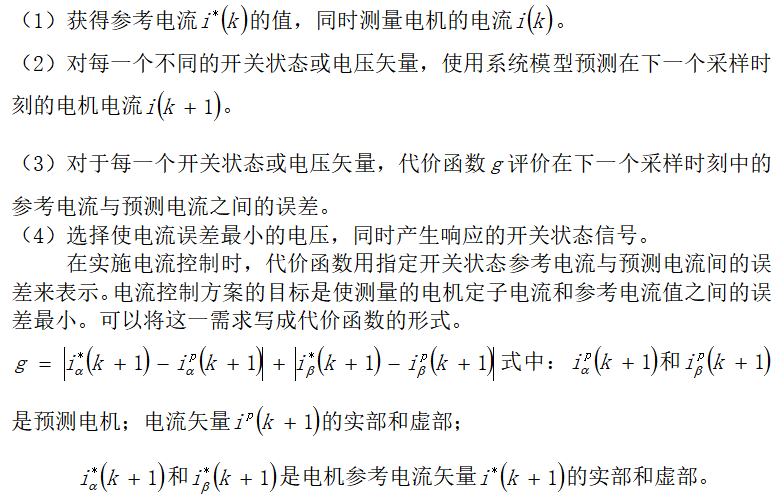
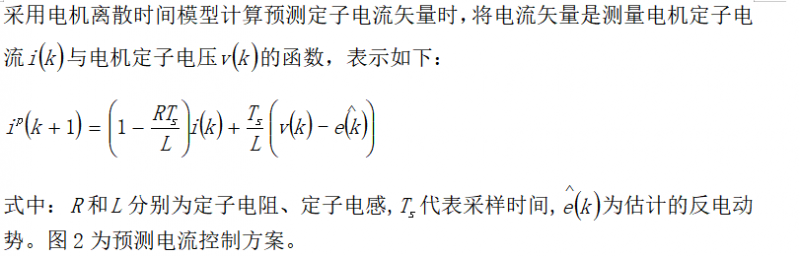
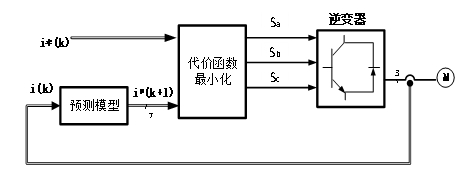
图2 预测电流控制方案
5 仿真结果
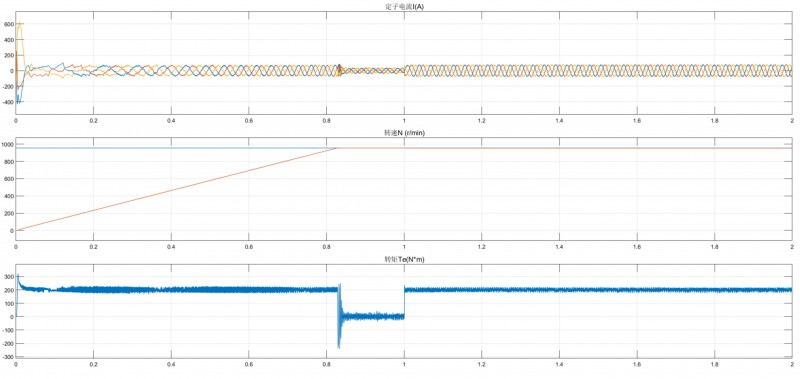
图3 空间矢量调制的电流控制的异步电机磁场定向控制的电机定子电流、转速、转矩的响应曲线
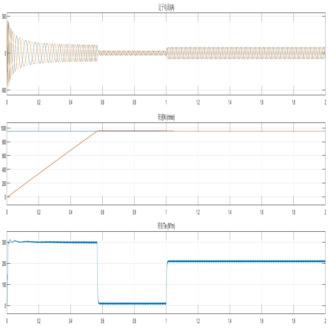
图4 基于预测控制的异步电机磁场定向控制的电机定子电流、转速、转矩曲线
从仿真曲线可以看出,采用预测电流控制的异步电机矢量控制系统,其电流波形的更趋于正弦;转速的响应速度更快,而且负载转矩发生突变转矩时,转速稳定,鲁棒性好;转矩的脉动更小。




共0条 [查看全部] 网友评论