



关键词:死区补偿;内模控制;扰动抑制;电流畸变;谐波抑制
1 引言
在SVPWM波控制逆变器时,为了保证逆变器电路的安全,通常给上、下桥臂设置一定的死区时间来防止其同时导通。该死区时间导致逆变器输出电压与目标电压存在偏差,且受电流方向的影响,虽然死区时间仅为微秒级,但开关频率较高时,其累积效应会导致逆变器的输出电流畸变和5、7次谐波分量增大,从而增大了电机的附加损耗,效率降低[1]。在低速和轻载时,将使电机转矩脉动增大并造成不稳定现象。因此,对逆变器的死区进行补偿,对提高交流调速系统的性能具有非常重要的意义。
广大学者对死区时间的补偿进行了深入的研究并提出了很多解决方案[2-8],最常用的补偿方法有以下两种:
第一种是基于平均误差电压补偿法,忽略功率器件开关时间、通态管压降等因素,以固定时间或电压来进行补偿,当负载波动、温度变化造成电机运参数变化时,即实际死区时间发生改变,其补偿效果不理想[9]。该方法依赖于准确的检测电流极性,在低频时,PWM噪声、零电流钳位问题造成了电流极性检测困难,这成为了制约上述方法应用的关键。
另一种方法将死区设置时间、开关管压降等因素引起的误差等效成一个外界扰动造成的,运用基于扰动观测器的方法观测出等效干扰,然后进行扰动补偿[10-12]。该方法运用了逆模型的原理,观测器的设计需要电机实际参数,当电机运行参数发生改变时,补偿效果受到一定的影响。
本文采用第二种方法的思路,基于模型的扰动抑制方法和内模控制原理,提出了一种改进型二自由度内模控制算法,在M-T坐标系中对M、T两轴采用双补偿的策略,实现了异步电机的控制系统的自适应在线补偿。
2 死区效应的分析

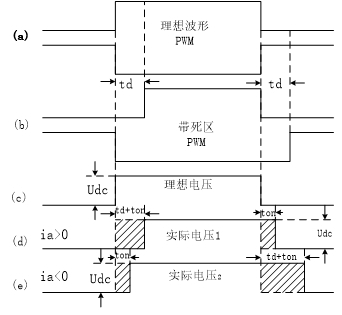
图1 一个周期的A相驱动波形
定义电流流入电机时为正,流出为负。以A相桥臂为例分析逆变器的死区效应。当![]() 时,存在两个开关时刻:VT1开通,VT4关闭;VT1关闭,VT4开通。通过分析图1可知,实际输出电压与理想输出电压存在一个脉冲形式的误差电压,由等效面积原理可得
时,存在两个开关时刻:VT1开通,VT4关闭;VT1关闭,VT4开通。通过分析图1可知,实际输出电压与理想输出电压存在一个脉冲形式的误差电压,由等效面积原理可得
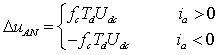 (1)
(1)
在理想条件下即误差电压完全检测准确时,同步旋转坐标系下加入死区补偿电压,当补偿电压完全等于误差电压,即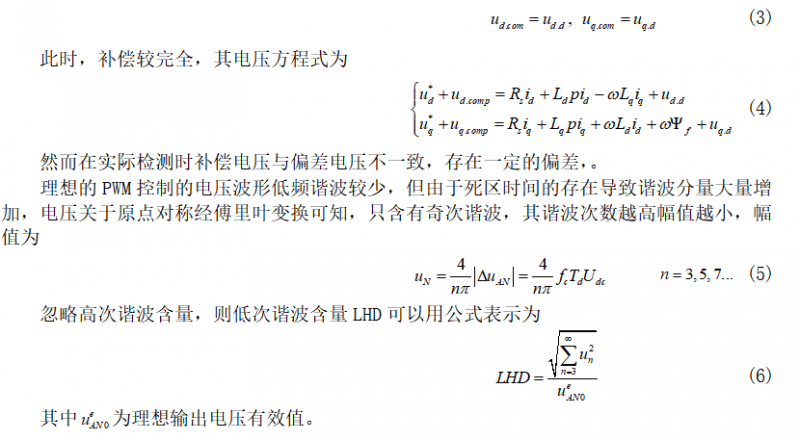
然而在实际检测时补偿电压与偏差电压不一致,存在一定的偏差,。
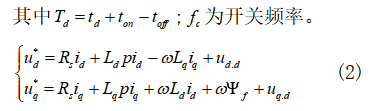
其中![]() 为理想输出电压有效值。
为理想输出电压有效值。
3 改进型内模控制技术原理

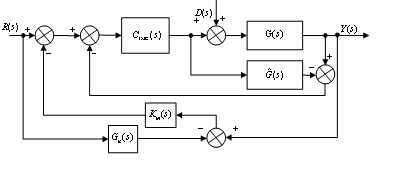
图2 改进型二自由度内模控制
它简化了二自由度内模控制的外环控制器的设计,并且能取得更好的抑制扰动的性能。
为了抑制逆变器的死区,将死区时间、开关的导通和关断时间及电机工况变化等因素引起的电压波动等效成一个扰动,然后通过基于模型的扰动抑制补偿器进行补偿,从而实现逆变器的死区在线补偿。
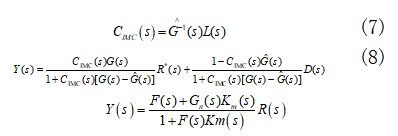
改进型内模控制技术应用到异步电机矢量控制系统中,其结构原理图如图3所示,它采用了双补偿结构,对M-T坐标系中异步电机模型进行两轴分开补偿,能有效克服由死区带来的电流畸变。
图3 基于改进型内模技术的在线死区补偿
另外,由于变频器零点钳位的作用和过零点的速度问题导致过零点检测往往不够准确,当其误差较大时导致基于平均电压理论的补偿控制策略出现反向误补偿,该问题往往限制补偿的准确的关键。而本文设计的基于模型扰动的改进型内模技术进行补偿避免了电流极性检测的问题,即使在复杂工况下仍能实现了电流畸变的有效补偿。
4 仿真验证与分析
本文仿真采用的异步电机参数:PN=3.73kW,UN=460V,fN=60HZ,Rs=0.087欧,Rr=0.228欧,Ls=Lr=0.0355H,Lm=3.47mH,设定的死区时间为300μs。
图4是在调速稳定后的电流波形,其中图4(a)是补偿前的电流波形,图4(b)是补偿后的电流波形。未经补偿的电流波形正弦度不高、畸变大且存在零电流钳位效应,经改进型内模控制补偿死区的电流波形正弦度显著改善,零电流效应得到有效抑制,这对电机的控制效果具有积极的影响。
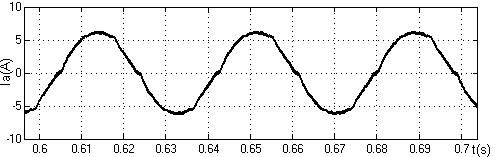
(a)补偿前电流波形
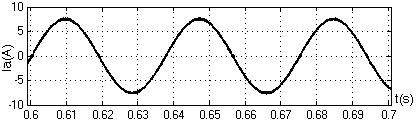
(b)补偿后电流波形
图4 死区补偿前后的转矩波形
基于双模型的扰动在线补偿方法来改进二自由度内模控制,有效抑制了死区效应。如图5所示,5N.m负载时总畸变率从4.74%降至2.15%。如图6所示,15N.m负载时总畸变率从3.14%降至1.55%,同时有效削弱了5、7、11等奇次谐波,提高了系统的低速性能。
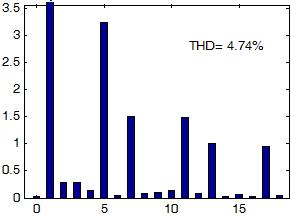
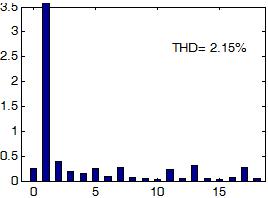
(a)补偿前电流频谱 (b)补偿后电流频谱
图5 负载5N.m相电流补偿前后频谱
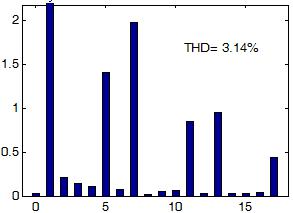
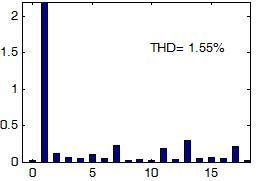
(a)补偿前电流频谱 (b)补偿后电流频谱
图6 负载15N.m相电流补偿前后频谱
该补偿方法不需要额外的硬件成本,同时克服了其它方法需检测电流过零点的缺点,针对由逆变器死区引起的电压偏差具有良好的效果,改善了系统的动静态性能,减小电机转矩波动,使系统的低速性能增强。
5 结论
本文详细分析了电压型逆变器死区效应产生的原因,针对异步电机SVPWM矢量控制系统,提出了一种改进型内模技术来进行逆变器的在线死区补偿,实现了死区效应的有效抑制。
该死区补偿控制策略避免了电流极性的检测不准确带来的误补偿,克服了固定时间死区补偿不能在电机参数变化时有效补偿等问题。
实验仿真分析表明,该控制策略能有效抑制死区时间带来的电流畸变和零电流钳位现象,提高了电流的正弦度并削弱了5、7等高次谐波,减小了电机低速的转矩脉动。






共0条 [查看全部] 网友评论