


关键词:移动机器人,教学平台
1 前言
智能移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等有害与危险场合得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。
移动机器人的主要特征具体指:能够自动辨别方向,自动定位,探测并躲避障碍物; 独立的供电系统和计算机;传感器与执行器相互协作。
移动机器人可以用于未知环境探测,日常生活服务比如草坪修剪机器人、酒店服务机器人、博物馆安保机器人。
因此,研究基于移动机器人的教学科研平台,将有利于更好的应用移动机器人。本文以Robotino移动机器人为例介绍可移动机器人教学平台的结构及功能。
2 基本结构
如图1所示为Robotino移动机器人实物图。

图 1Robotino可移动机器人实物图
2.1 控制系统
Robotino可移动机器人的控制系统包括电源开关、控制单元、嵌入式PC、微控制器、复位按钮。
(1)电源开关。设置与Robotino的网络连接可以通过重置按钮返回到其默认值。
复位按钮位于控制单元的底座上。在Robotino打开的情况下按住重置按钮约3秒钟,以便将所有设置恢复为铭牌上显示的值。
(2)控制单元。Robotino中的控制单元包括带嵌入式PC和微控制器的控制器PCB,以及所有相关接口。
(3)嵌入式PC。Robotino中的嵌入式PC控制移动机器人系统。如图2所示为Robotino可移动机器人的嵌入式PC示意图。嵌入式PC直接安装在Robotino控制单元的主PCB上。它连接到控制单元的接口和微控制器。
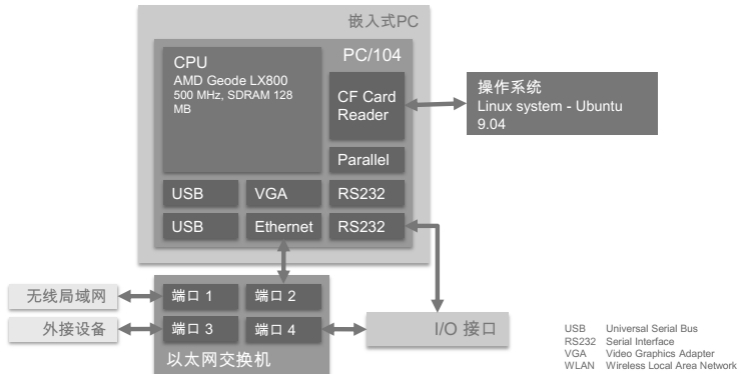
图2 Robotino可移动机器人嵌入式PC
(4)微控制器。如图3所示为微处理器功能示意图。微控制器监控电源电压,控制电机并管理Robotino的数字和模拟输入和输出。与嵌入式PC一样,微控制器直接安装在Robotino控制单元的主PCB上。它连接到I/O接口,所有电机和增量编码器以及嵌入式PC,还使用了FPGA。

图3 Robotino可移动机器人微处理器示意图
(5)复位器按钮。设置与Robotino的网络连接可以通过重置按钮返回到其默认值。复位按钮位于控制单元的底座上。在Robotino打开的情况下按住重置按钮约3秒钟,以便将所有设置恢复为铭牌上显示的值。
2.2 驱动系统
Robotino可移动机器人的驱动系统主要包括全方位驱动器、电机、增量编码器、减速器、车轮等部分组成。
(1)全方位驱动器。全方位驱动器(也称为omnidrive),Robotino可以在各个方向上行进并在现场旋转。组成omnidrive的三个独立驱动单元由电机,增量编码器,齿轮单元和车轮组成,并集成在Robotino的底盘中。
(2)电机。Robotino配备三个电机,可以相互独立地为三个全向轮中的每一个提供动力。增量编码器安装在每个电机上并测量其旋转角度。
可通过Web界面配置电机的最大速度和最大加速度。电机连接到电力电子PCB上的电机输出。电机由微控制器控制。电机速度设定值在编程语言和系统中指定。
(3)增量编码器。Robotino中的每个电机都有一个增量编码器。根据增量编码器提供的值,电机控制器能够将实际电机速度与设定值进行比较和调节。此外,这些值还用于确定移动系统的位置。增量编码器连接到电力电子PCB上相应的直接相邻的编码器输入。
(4)减速器。Robotino在每个电机和车轮之间包含一个齿轮箱,传动比为32:1。齿轮箱可以在最低速度下高精度地操作移动系统。
(5)车轮。Robotino的三个全向轮可以使系统向各个方向移动,并在固定位置旋转。每个车轮都有自己独立的悬架,由自己的电机驱动。
2.3 传感器
(1)保险杠。Robotino上的保险杠确保在发生碰撞时停止程序执行,从而停止运动。
切换保险杠时程序执行的中断可以通过Robotino Web界面取消激活。此安全功能作为默认值激活。
保险杠连接到Robotino底盘的底部边缘,并连接到电力电子PCB。
Robotino碰撞安全传感器是一种所谓的压敏保险杠。该安全保险杠由不同形状的塑料型材和集成的开关室组成。开关室包围两个彼此分开的导电表面。当压力施加到保险杠上时,这些表面被短路,并且产生信号并将其传输到评估单元。Robotino上使用的安全保险杠根据静态电流原理运行,因此可以检测到断线并且可以停止Robotino。静态电流是流过电路的电流,即使它不活动也是如此。如果该电流中断,则导线断开或安全保险杠损坏。
(2)红外距离传感器。红外距离传感器可以确定Robotino周围物体的距离。Robotino总共配备了九个红外传感器,它们围绕底座以40°的角度排列。
每个距离传感器读出电压电平,其值取决于到反射物体的距离。距离传感器始终处于活动状态。
距离传感器连接到机箱底部,并连接到电力电子PCB。三组三个传感器各自连接到带状电缆。
红外距离传感器可以对距离4到30厘米的物体进行精确或相对距离测量。它们的特点是易于连接,仅涉及电源和一个输出信号。他们的电子评估单元测量距离并将其读出为模拟电压信号。
(3)陀螺仪。Robotino具有陀螺仪,用于提高位置感应的精度。陀螺仪为此确定了Robotino方向的变化。陀螺仪在角动量守恒的基础上测量角速度。如果试图使旋转物体围绕其已经旋转的轴以外的轴转动,则物体对该运动施加相反的扭矩,从而确保总角动量保持不变。由此扭矩产生的力在陀螺仪的悬架上测量。由于机械陀螺仪太大,太重且易受攻击,近年来已开发出数字陀螺仪,其数量不超过一欧元硬币,但非常准确。
(4)相机。Robotino中的摄像机生成实时图像,可以对其进行分析以进行导航,以及检测障碍物和物体。
(5)光电传感器和电感式传感器。光电传感器基于不同程度的反射率,两个包含的光电传感器(所谓的漫射光传感器)可以检测各种表面和颜色。因此,传感器可用于沿定义的路径引导Robotino,或者将其准确地停在指定位置。电感式传感器检测地板下的金属物体。例如,它用于路径控制和精确定位。
2.4 接口
Robotino提供了包括WLAN、I/O接口、电机/编码器、USB接口、PCI接口、以太网络等不同的接口,为系统的运行与设计提供了最大的扩展可能。
2.5软件编程环境
开放式的编程环境Robotino编程接口(API)允许使用各种编程语言和系统来开发控制程序。API支持以下语言和系统:
C / C ++、JAVA、.Net、LabVIEW和MATLAB \ Simulink机器人操作系统(ROS SmartSoft)、
Microsoft Robotics Developer Studio。
3 结论
本文通过对Robotino可移动机器人各硬件结构以及功能,并对软件编程接口的研究,说明Robotino可移动机器人教学平台能够完成一系列教学科研任务。
另外,该移动机器人平台还可用来进行运动与碰撞、传感器应用、图像系统应用以及Robotino SIM的场景模拟,都将会取得良好的效果。
作者简介:
段华伟(1990-),工学硕士,研究方向:过程控制及机器人技术。




共0条 [查看全部] 网友评论