



关键词:直接转矩控制;开关磁阻电机;滞环控制器;转矩脉动抑制
1 引言
开关磁阻电机调速系统(简称SRD)是一种新型调速驱动执行系统,它主要由开关磁阻电动机本体、位置检测结构、电流检测结构、控制单元和功率变换器五个部分组成。相比较于传统异步电机,开关磁阻电机结构简单,转子上无绕组,只有定子上有集中式绕组,所以相比于传统异步电机,开关磁阻电机运行速度快、制造成本低[1-3]。目前开关磁阻电机已经应用于牵引运输、电动车辆、航空工业、家用电器和伺服控制等领域,显示出了其强大的竞争力。由于开关磁阻电机是一个非线性系统,传统控制方法下的开关磁阻电机运行时会产生较大的转矩脉动。
直接转矩控制(Direct Torque Control , DTC)方法来源于传统异步电机中的直接转矩控制,DTC的控制思想是同时对电机的转矩和磁链进行反馈控制,通过对于转矩和磁链的调节选择合适的电压矢量提供给功率电路,达到直接控制转矩的目的。
2 SRM直接转矩控制系统的设计
2.1 SRM的转矩特性
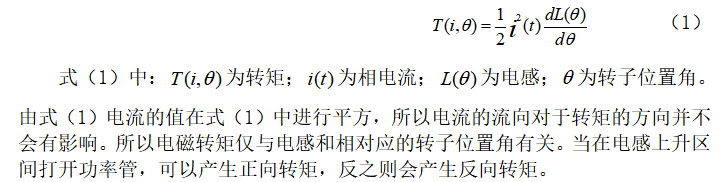
SRM的运行原理为:磁通总是遵循着最小磁阻而导通,导通后产生磁链扭曲产生转矩,产生机械能[4]。如果忽略磁场饱和或者磁场之间的相互影响,那么转矩仅与电流和转子的位置有关。电磁转矩的方程可以表示为:
2.2 DTC控制原理
DTC系统框图如图1所示,DTC控制策略对转矩和磁链进行闭环控制,根据转矩和磁链的偏差选择电压矢量,然后控制功率电路使电机工作在期望状态[5]。不同于SRM的传统控制方法(开关角控制、电流斩波控制和电压斩波控制)在直接转矩控制中不需要控制开关角或者预设电流滞环。
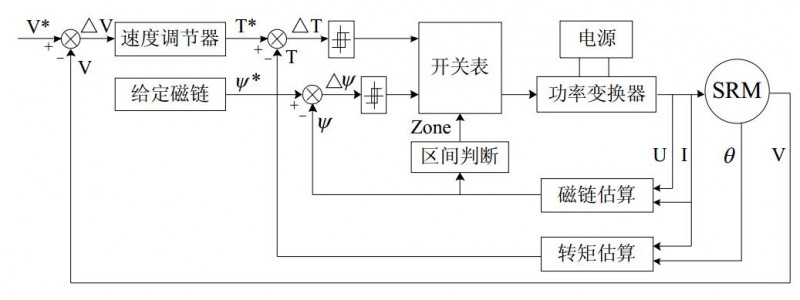
图1 开关磁阻电机DTC系统框图
2.3 电压空间矢量的选择
本次仿真选取功率变换电路采用了半桥式结构。电压空间矢量与电机的相数和各相电压的状态有关,对于本次研究所选择的6/4极对数的三相SRM,有三种电压状态,如图2所示[6]。拿出单相绕组的电压状态为例,“1”状态下,开关管T1、T2导通,此时绕组中被施加正向正向电压,电路处于激励状态。“0”状态下,T1关断T2导通,此时电流下降速度缓慢,磁链变化较小,电路处于续流状态。“-1”状态下,T1、T2均被关断,此时二极管D1、D2导通,电路被施加反压,磁链迅速减小。因此,对于三相电机共有33=27个空间电压矢量可以选择,选取6个对称的空间电压矢量(0,1,-1),(0,-1,1),(1,0,-1),(-1,0,1),(-1,1,0),(1,-1,0)如图3所示,作为直接转矩控制的电压空间矢量。选取的空间电压矢量将平面分为了6个扇区,每个扇区的边界为相邻空间电压矢量的角平分线,可以得出以下结论。当磁链位于Ⅰ扇区时,以逆时针方向为正方向,电压矢量V2、V6可以使磁链增大,V3、V5使磁链减小,V2、V3可以使转矩增大,V5、V6可以使转矩减小。
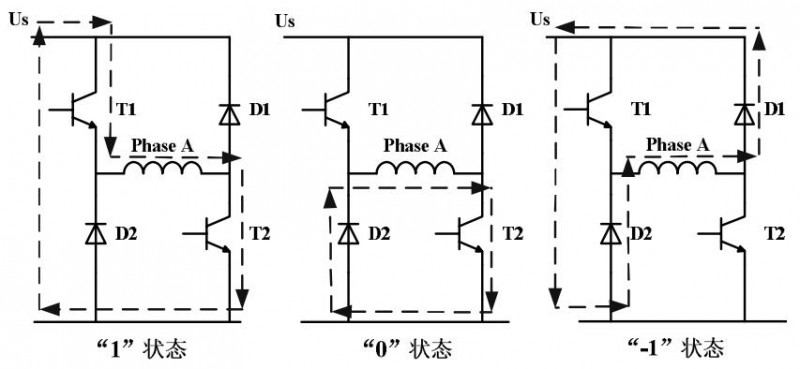
图2 SRM单相绕组的电压状态
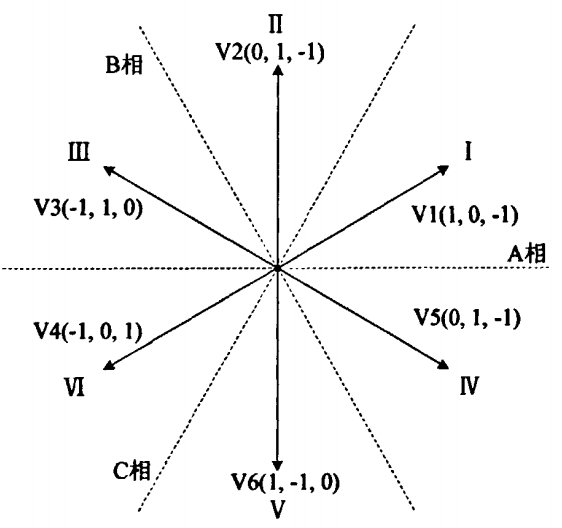
图3 选取电压矢量示意图
将6个扇区中的电压矢量、磁链和转矩的关系分析完成之后,可以将其列为控制矢量表,在附表中Τ↑、Τ↓分别代表转矩上升和下降,Ψ↑、Ψ↓分别代表磁链上升和下降。
附表 电压空间矢量表

转矩和磁链的反馈是直接转矩控制所必须的,转矩大小可以通过电流和转子角度信息通过查表法得到,由于本次使用SIMULINK进行仿真,可以直接从SRM的本体模型中引入转矩反馈。根据电压方程可以推导出磁链的表达式:2.4 磁链检测与扇区判断
![]() (2)
(2)
通过式(2),当采集到绕组的电压和电流后,可以计算出定子磁链值。为了方便进行就算,将磁链从三相坐标系转化为两相坐标系如式(3):
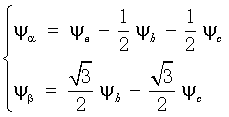 (3)
(3)
变换后的磁链大小和角度由式(4)计算:
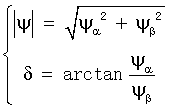 (4)
(4)
扇区的选择可以依据![]() 的值决定,当
的值决定,当![]() 的值在[0°,60°)之间时,磁链位于扇区Ⅰ,之后每隔60°增加一个扇区,扇区Ⅵ对应
的值在[0°,60°)之间时,磁链位于扇区Ⅰ,之后每隔60°增加一个扇区,扇区Ⅵ对应![]() 值区间为[300°,360°)。
值区间为[300°,360°)。
3 DTC系统仿真模型的设计
本文将SRM的DTC调速系统在MATLAB中建立仿真模型,主要包含了开关表选择模块,模糊PI模块,磁链扇区判断模块,功率变换器模块,磁链计算模块,开关磁阻电机本体模块等。本仿真系统框图如图4所示,其中模糊PI模块仿真如图5所示。本次仿真的步长是10-6s,求解算法是ode45。
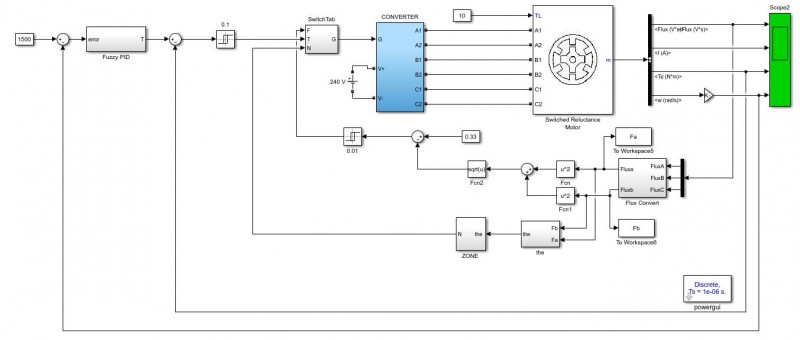
图4 基于模糊PI的直接转矩控制仿真图

图5 模糊PI模块仿真图
本次仿真中,速度外环反馈值先与参考转速相比较,然后经过模糊PI输出参考转矩。输出的参考转矩与实际转矩相比较,构成转矩内环。
4 仿真结果与分析
本次仿真的参数如下:转速1500r/min,负载转矩为10![]() ,转矩控制器滞环限幅为0.1。在如图5所示的模糊PI控制器中Kp=25,Ki=20,模糊控制器采用三角形隶属函数,模糊因子和解模糊因子由公式计算得到。
,转矩控制器滞环限幅为0.1。在如图5所示的模糊PI控制器中Kp=25,Ki=20,模糊控制器采用三角形隶属函数,模糊因子和解模糊因子由公式计算得到。
本次仿真将产生的磁链幅值传输到MATLAB的工作空间,在MATLAB的命令窗口下使用plot函数绘制出磁链轨迹图,将使用模糊PI的直接转矩控制的磁链轨迹图与使用电流斩波控制(Current Chopping Control,CCC)产生的磁链轨迹图相比较,如图6所示。从图6中可以看出,电流斩波控制(CCC)的磁链轨迹呈现三角形运动,结合模糊PI的直接转矩控制磁链为一个近似于圆形的椭圆,可以看出磁链反馈及其滞环把磁链控制在幅值合适的范围之内,磁链轨迹稳定。
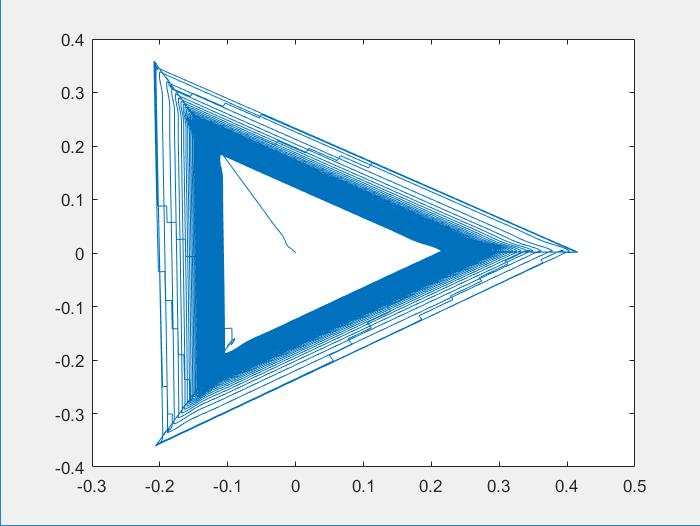
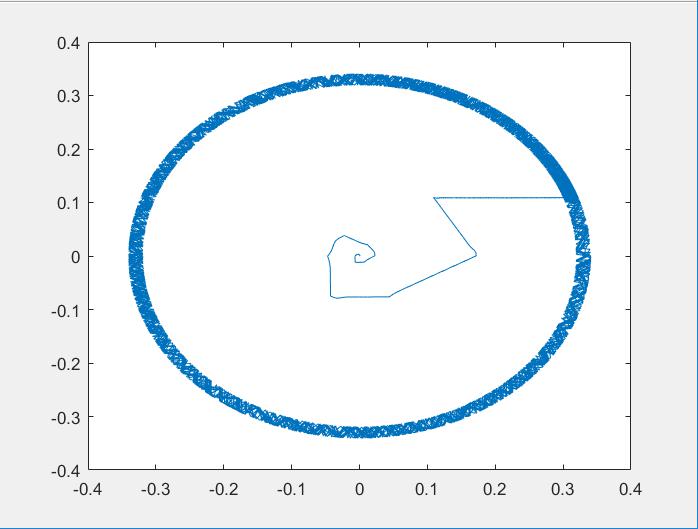
图6 磁链轨迹比较图
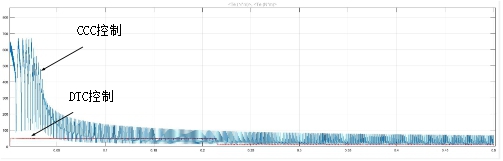
图7 转矩波形比较图
两种控制方法的波形比较图如图8所示,从图8中可以看出采用CCC控制方法的SRM转速上升速度过快,造成启动电流过大。采用DTC控制方法下的SRM,由于事先整定了PI参数,并且通过模糊算法对PI参数进行在线调节,转速上升过程平稳,启动电流小于CCC模式下的启动电流。

图8 转速波形比较图
从图9给出了两种控制方法下的磁链波形,对比图(a)、(b)可以看出,采用模糊PI的直接转矩控制下的磁链稳定在0.4Wb左右,磁链波形基本稳定;采用CCC控制方法下的磁链发生畸变,当SRM进入稳速运行时,磁链为0.2Wb,是最大磁链幅值的33%,磁链幅值变化幅度较大。
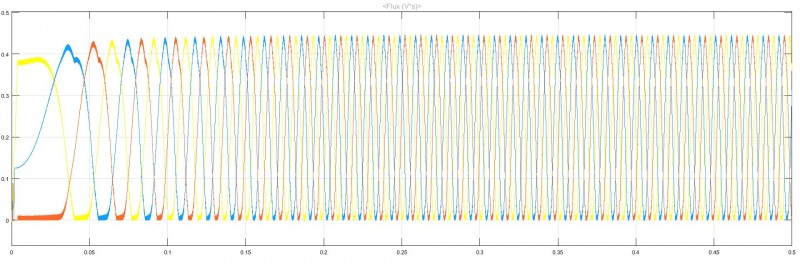
(a)DTC控制下磁链波形
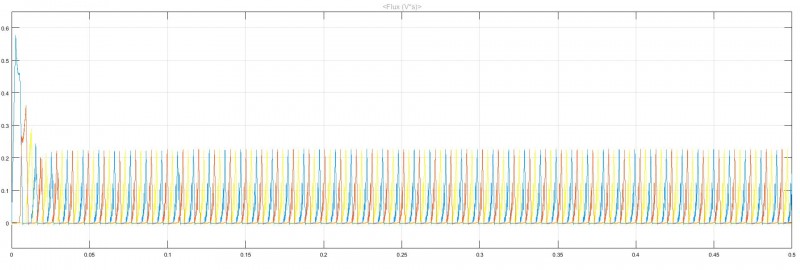
(b)CCC控制下磁链波形
图9 磁链波形比较
两种方法下的电流波形如图10所示,在传统的CCC控制方法下,启动电流很大,被滞环限制在了200A,SRM稳定运行时电流为25A,为启动电流的12.5%,电流变化较大。而采用基于模糊PI的直接转矩控制下的SRM系统启动电流减小约为150A,当电机稳速运行时,电流为180A,电流波形稳定,对于功率电路的选型要求降低,可以有效地减小转矩脉动及噪音。

(a)DTC控制下电流波形
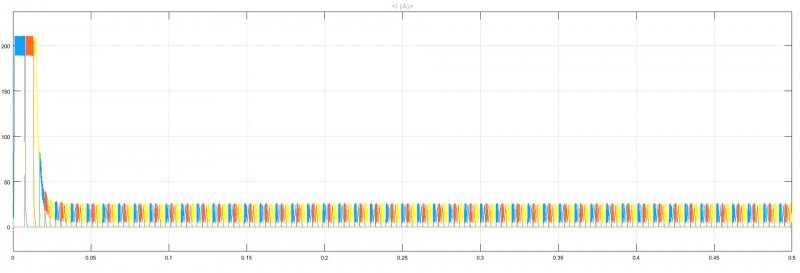
(b)CCC控制下电流波形
图10 电流波形比较
由以上仿真结果表明,基于DTC的SRM调速系统具有以下优点:SRM的定子电流、磁链波形平滑对称,且定子磁链空间轨迹为圆形;对转矩脉动的抑制作用显著;由于能够对电机的输出转矩进行直接有效的控制,故系统动态性能优越。
5 结束语
本文将模糊PI控制和直接转矩控制相结合应用到对于SRM的控制当中,通过MATLAB仿真结果证明基于模糊PI的直接转矩控制可以有效的对SRM的磁链幅值和转矩进行控制,有效的降低了电机的转矩脉动,提升了系统的动态性能和稳定性。






共0条 [查看全部] 网友评论