


关键词:扫地机器人,红外遥控,传感器
1 引言
自动扫地机器人是当今服务机器人领域的研究热点。从理论和技术上讲,自动扫地机器人比较具体的体现了移动机器人的多项关键技术,具有较强的代表性;从市场上前景讲,自动扫地机器人将大大降低劳动强度,提高劳动效率,适用于宾馆﹑酒店﹑图书馆﹑办公场所和大众家庭。自动充电功能对扫地机机器人来说也是十分重要,由于机器人自带的充电电池容量有限,不一定能保证完成清扫工作,这就需要机器人能自动寻找充电器充电。当电压检测芯片检测到电源电压低于一定值时,自动扫地机将自动寻找充电座进行充电。
2 系统总体设计方案
本系统主要由控制器模块、电压检测电路设计、电压检测隔离电路、控制吸尘器开关电路、寻找充电器电路构成,本系统的方框图如图1所示。
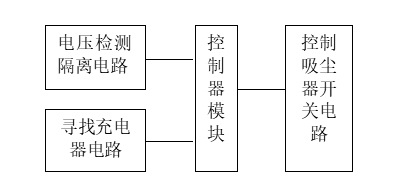
图1 系统方框图
3 硬件电路设计
MC9S12DG128有8路PWM输出,本系统利用PWM输出来控制两轮转速,实现差速控制;丰富的数字I/O口可以接碰撞传感器、红外避障传感器等,可编程的上升沿或下降沿触发可用来检测楼梯。
3.1 电压检测隔离电路
硬件机器人需要能够检测到什么时候需要充电,一种方法是监测电源的电压或者限制机器人的运行时间,另一种方法是精确测量使用的电能,通过对电源的监测,机器人能够预测何时需要充电。本系统采用电压检测芯片HT7033来检测电压。HT70XX系列具有接口简单,低功耗,低温度系数,高精度,参考源稳定性高,成本低等特点。电源电压是12V,需要在电源电压低于l0V时检测到电池欠压,HT70XX系列最大可检测电压是7V。可以使芯片检测电压,具体电路见图2。
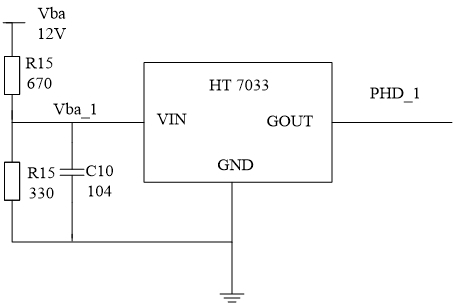
图2 HT7033应用电路
R15和R55是分压电阻,阻值分别为670欧姆和330欧姆,对于本系统,HT7033的输入引脚VIN的输入电压值最小为3.3V,最大为3.96V,因此HT7033的输出电压在3.96V以下,适合与单片机的I/O口直接相连,在输入电压低于3.3V时跳变成低电平。考虑把功率部分和数字部分隔离,这里还需要把HT7033的输出信号隔离,然后再送给单片机的I/O口,选用6N137作为隔离芯片,6N137光藕合器是一款用于单通道的高速光祸合器,具有温度、电流和电压补偿功能。输入电流达到一定值时发光二极管发光,经片内光通道传到光敏二极管,反向偏置的光敏管光照后导通。发光二极管正向电流0-250uA,光敏管不导通;发光二极管正向压降1.2-1.7V,正向电流7-15mA,光敏管导通。对于单片机来说电压检测不需要一个连续的变化过程,只需要知道电平发生变化即可,电压检测隔离电路如图3所示。
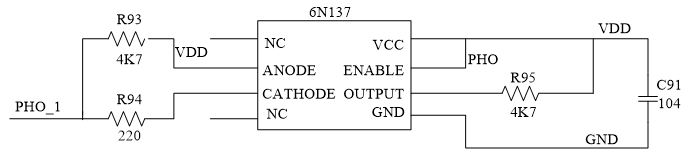
图3 电压检测隔离电路
3.2 控制吸尘器开关电路
机器人检测到电池欠压后,关闭微型吸尘器以节约电能,并利用单片机的I/O口(PS4)来控制微型吸尘器的开关,该信号经过光耦隔离(PS4-1)后控制三极管的导通来控制微型吸尘器电源的开关。三极管9013是一种低电压,大电流,小信号的NPN型三极管,最大集电极电流是0.5A,集电极一基极击穿电压45V,集电极一发射极击穿电压25V,具体应用电路如图4所示。
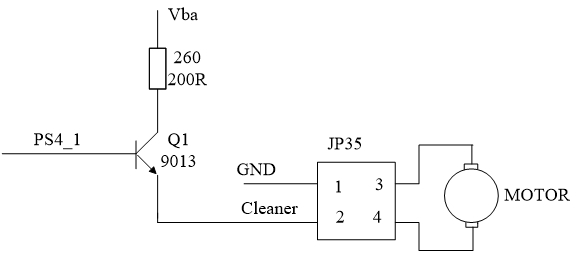
图4 控制吸尘器开关电路
3.3 寻找充电器电路
当机器人检测到电池电量低时,需要自动寻找充电器,本系统采用红外线接收的方法寻找充电器,红外接收电路通常由红外接收二极管与放大电路组成,放大电路通常又由一个集成块及若干电阻电容等元件组成,并且需要封装在一个金属屏蔽盒里,因而电路比较复杂,体积也比较大。SFH506-38是一种特殊的红外接收电路,它将红外接收管与放大电路集成在一体,体积小,密封性好,灵敏度高,并且价格低廉,它仅有三条管脚,分别是电源正极、电源负极以及信号输出端,其工作电压在5V左右,接收载波频率是38kHz,只要给它接上电源即是一个完整的红外接收放大器,使用十分方便。按照手册,SFH506-38的接口电路的如图5所示。
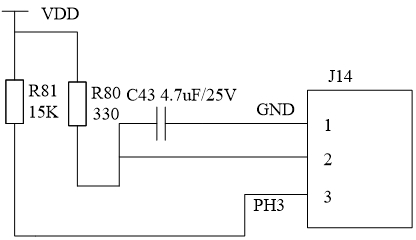
图5 红外接收头SFH506_38接口电路
为了让机器人尽快找到充电器,本系统采用了两个SFH506-38,安装在机器人的前面,中间用挡板进行隔离,使它们能够接收不同方向的信号,避免互相干扰。当机器人接近充电器后,通过检测充电器充电电流来判断是否己经对接上。充电器上安装一个红外发射装置,不断发送红外线,机器人检测到电压低时先原地转圈,利用两个红外接收头判断充电器方向,有4种情况:
(1)右边接收头接收到信号,而左边没有,说明充电器在右前方,机器人向右旋转前进。
(2)左边接收头接收到信号,而右边没有,说明充电器在左前方,机器人向左旋转前进。
(3)左右两边的接收头都接收到信号,说明充电器在正前方,机器人直线前进。
(4)左右两边的接收头都没有接收到信号,说明充电器可能在机器人的后方,或者充电器发出的信号被物体挡住了,这时机器人首先原地转一圈,如果还是都接收不到信号,则沿着墙边或者家具边行走,每隔一小段时间就旋转一下搜寻红外线信号,直到找到为止。
4 软件设计
自动扫地机自动充电流程的难点主要是自主寻找充电器,本系统的自动充电流程图如图6所示。
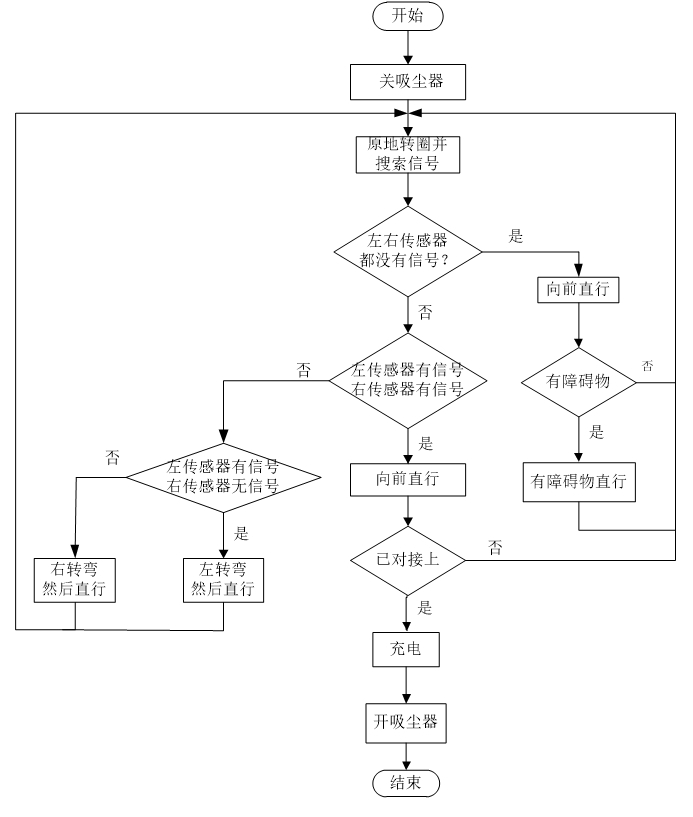
图6 流程图设计
5 结束语
本系统设计了一种基于红外检测、判断的自动寻找充电器的方法,该方法利用两个接收头接收到得红外信号判断充电器的方向,基本以直线接近充电器,较单纯沿墙壁走的寻找充电器方法效率高。
参考文献:
[1]魏文强,庄晓东. 基于单片机的无线充电自启动系统设计[J]. 电子元器件与信息技术,2018(12):1-4
[2]肖凡玥. 基于STM32的无人机锂电池充电系统[J]. 中国高新科技,2019(04):48-50
[3]周风余,万方,焦建成,边钧健. 家庭陪护机器人自主充电系统研究与设计[J]. 山东大学学报 (工学版),2019(01):55-65+74
[4]史永刚,兰宁,魏家选,王威龙,祁雷超. 基于锂电池的无线充电模块的设计[J]. 科学技术创新,2019(03):172-174
作者简介:
张建平(1983-),女,天津人,副教授,硕士,主要从事电子信息方面的研究。




共0条 [查看全部] 网友评论