


关键词:远程遥控驾驶;无线通讯系统;图传和数传系统;控制系统
1 引言
目前国内的垃圾处理厂、城市污水处理厂、化学废物废料处理厂等一些环境恶劣的工作场所,普遍采用装载机设备进行作业。设备操作人员长期处于重臭气味、高污染、高温、高噪音、高粉尘的环境中,对身体健康损害极大。为了将操作人员从恶劣环境中解脱出来,特研发了一款特种装载机器人。
2 特种装载机器人系统组成
特种装载机器人由装载机本体和远程遥控驾驶室组成,整体结构如图1所示。特种装载机器人具有远程遥控驾驶操作和本地操作两种工作模式。通过对装载机本体进行电气化改造,并搭建无线通讯系统、数传系统、图传系统以及控制系统实现特种装载机器人的远程遥控驾驶功能。
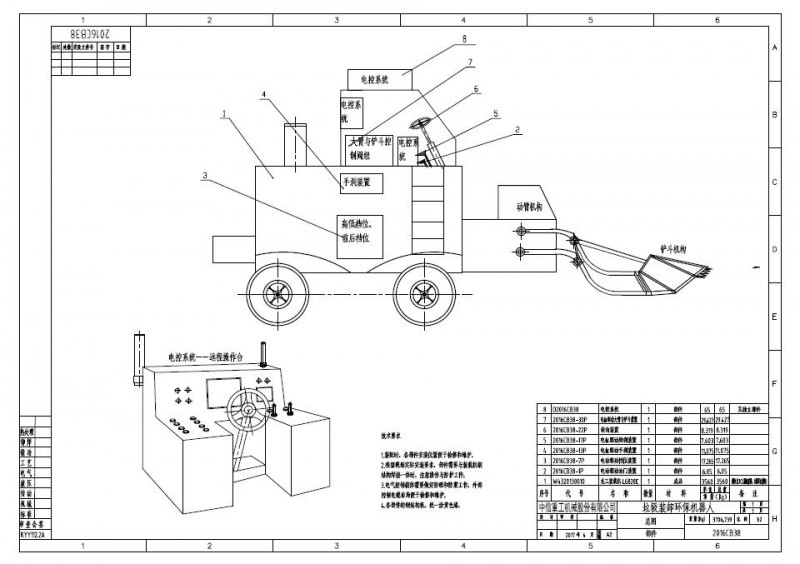
图1 特种装载机器人的结构总图
3 特种装载机器人系统设计
3.1 装载机本体改造
为了实现特种装载机器人的远程遥控功能,需要对装载机本体上的油门、脚刹、手刹、进退档、高低速档、大臂升降、铲斗收缩以及转向机构进行改造。具体情况介绍如下:
(1)油门装置:保留原有机械踏板机构,现采用电缸+直流驱动器方式完成对油门装置的控制。
(2)刹车装置:保留原有刹车机构,现采用杆端关节轴承联结方式使脚踏液压阀芯自由运动,通过电缸+直流驱动器的驱动方式完成对刹车油缸供油量的调节控制,实现安全制动和安全脱离功能。
(3)档位装置:保留车体原有的档位开关,采用杆端关节轴承联结方式使阀芯上中下位置自由运动,通过电缸+直流驱动器的驱动方式完成对车辆离合阀组的阀芯三个开关位置的调节控制,实现快速、安全换挡功能。
(4)大臂与铲斗装置:保留原有液压多路阀组及管路系统。在液压多路阀组基础上采用杆端关节轴承联结阀芯方式,使车辆运行过程中多路阀阀芯能够上下位置无卡阻、自由滑动。驱动方式采用电缸+直流驱动器,实现对车辆多路阀组的阀芯开口大小比例的调节控制,实现大臂升降与铲斗翻转功能。
(5)转向装置:保留原有转向机构。在液压转向器与转向盘之间新增加过渡轴+同步带轮系联结方式,驱动方式采用步进电机+编码器+控制器,实现远程方向盘对本地电机旋转角度和速度的控制。同步带具有防滑和过载保护作用,保障了转向机构安全、可靠运行。
3.2 控制系统
特种装载机器人的控制系统分为两部分,一部分是远程驾驶室的PLC以及数据采集模块;另一部分是装载机本体上的控制箱内的PLC以及数据采集模块。远程遥控驾驶室的控制系统负责采集远程驾驶舱的油门、刹车、档位开关、大臂升降和铲斗收缩手柄以及方向盘的信号,并且通过无线网络传输给本地控制系统。本地控制系统接收远程控制系统的信号,并且发送控制信号给油门、刹车、档位、大臂、铲斗以及方向盘等机构的驱动器,使其控制各个电缸动作,完成对装载机的操作。本地控制系统同时完成本地操作和远程操作的切换以及系统安全保护功能。特种装载机器人的控制系统框图如图2所示。
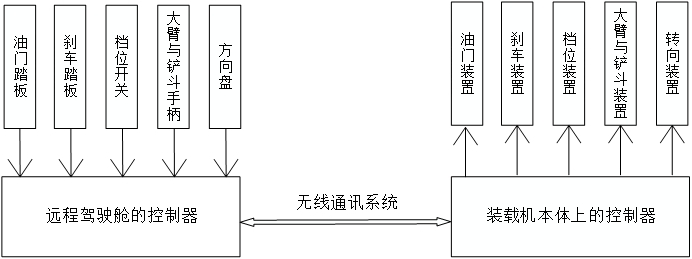
图2 控制系统框图
3.3 无线通讯系统
无线通讯系统采用成熟、稳定、可靠的汽车驾考无线通讯系统,可实现远距离、高带宽、数据分级等功能,确保系统稳定可靠。在不架设基站的情况下可实现空旷区域1.5km无线传输,带宽可达300M;架设基站的情况下通讯距离可大于20km。
该套无线通讯系统具有超强特性。工业级设计防水等级IP68,芯片支持-40~75℃恶劣工作环境;站点设备支持5级无线链路信号强度指示灯,方便天线校对;独有抗干扰机制支持在5G频段时,10台以上不同频率基站共存同一中心,互补影响;支持发射功率自动调整、手动调整步进1dBm;支持4920MHz到6100MHz超级频段,支持多国频率漫游;支持车载、船载快速漫游切换功能以及支持站点指定信号强度连接范围设定。
3.4 图传和数传系统
图像传输系统是由两台网络摄像机、硬盘刻录机和显示器组成的。网络摄像机拍摄的图像通过无线通讯系统建立的无线网络传输到驾驶舱。远程驾驶室的操作人员通过显示器上的视频图像判断装载机周围的路况,进而更准确安全的操作装载机。数据传输系统是指两个控制系统的PLC之间进行数据传输。远程控制系统的PLC采集驾驶室油门、刹车、档位开关、大臂升降和铲斗收缩以及方向盘的输入信号并传输到本地控制器,本地控制器接收信号之后发送给执行机构的驱动器。图传系统和数传系统如图3所示。
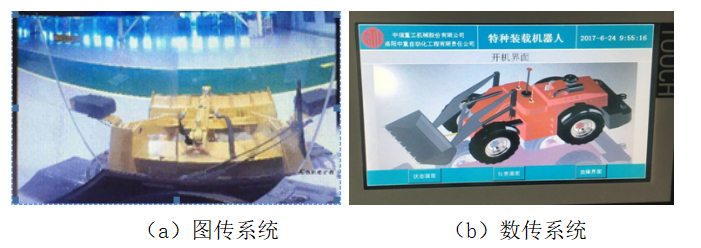
图3 图传和数传系统图
4 总结
本文研发了一款特种装载机器人,通过对机器人的各项功能测试以及整机调试和上路试验,表明该款机器人油门、刹车、档位、大臂和铲斗以及方向盘等各执行机构动作准确,图像传输清晰无卡顿,数据传输准确无丢失,可实现远程遥控装载机功能,避免了装载机操作人员遭受恶劣环境对身体的影响。而且该款机器人也可以应用于紧急抢险救灾现场,保障救援人员的生命安全。
参考文献:
[1] 崔守娟,栾荣华,张萍华. 自动装载机控制系统设计[J]. 农业科技与装备, 2016,(8):11-13.
[2] 骆培荫,廖凯. 浅析装载机智能控制系统的组成[J]. 工程机械,2007(5).
[3] 邵善锋,吴国祥,李玉河,李莺莺. 装载机智能控制系统研究[J]. 工程机械, 2009,40(3).
[4]袁博,苏凡囤,张云仲,王海涛. 轮式装载机故障诊断虚拟系统设计[J]. 机械制造与自动化,2012(5).
作者简介:
第一作者:董建明,河南省洛阳市涧西区建设路206号中信重工机械股份有限公司,1026281957@qq.com。
第二作者:耿玲,河南省洛阳市涧西区建设路206号中信重工机械股份有限公司。




共0条 [查看全部] 网友评论