



关键词:永磁同步电机;无差拍电流预测控制;扩张状态观测器;扰动补偿
1 引言
永磁同步电机( Permanent Magnet Synchronous Motor,PMSM)具有效率高、功率密度大、可靠性高等优势,在电动汽车、风力发电等领域得到了广泛应用[1]。PMSM是一个多变量,非线性,强耦合系统,对于系统扰动非常敏感,通常采用磁场定向控制方法来实现d-q轴解耦控制,以便使其获得与直流电机相似的转矩控制性能[2]。其中电流环的控制对整体的性能起着至关重要的作用,工业控制中对电机控制性能要求日益提高,传统的PI控制已经不能满足控制要求。
随着半导体和计算机软、硬件技术的发展,一些先进的控制方法开始广泛应用于PMSM控制系统中。如:模型参考自适应控制[3],模糊控制[4],神经网络控制[5],滑模控制[6]和预测控制[7]等。预测控制中,无差拍电流预测控制采用SVPWM调制,具有较小的电流波纹和较好的电流动态特性,成为研究热点。但是无差拍预测控制是一类依赖电机模型的控制方法,而且该方法不能直接处理系统扰动的影响。当系统存在模型严重失配或参数变化时,控制精度会显著降低。但是在PMSM 驱动系统中,受电机运行工况和温度等影响,电机不可避免地存在扰动、参数变化等。为此,文献[8-9]提出了基于改进无差拍控制的PMSM电流预测控制方法,文献[10]在无差拍预测控制中应用鲁棒控制,文献[11]采用参数辨识方法,实时估计电机参数,并更新控制器参数,文献[12-14]采用了观测器对扰动进行观测并补偿,仿真显示观测器方法具有优异的性能。 其中扩张状态观测器不依赖于被控对象精确是数学模型,设计简单,鲁棒性强,便于实现,并且在有参数扰动、外部扰动和传感器噪声系统中表现优良。
本文在d-q坐标系下,根据永磁同步电机和逆变器的数学模型以及无差拍控制思想,建立了ESO观测器对电机参数扰动下的系统扰动进行观测并补偿;改进了传统速度环PI控制器,提高调速系统的动态品质,并对系统延时进行了补偿,最后通过仿真实验验证了方案的可行性与有效性。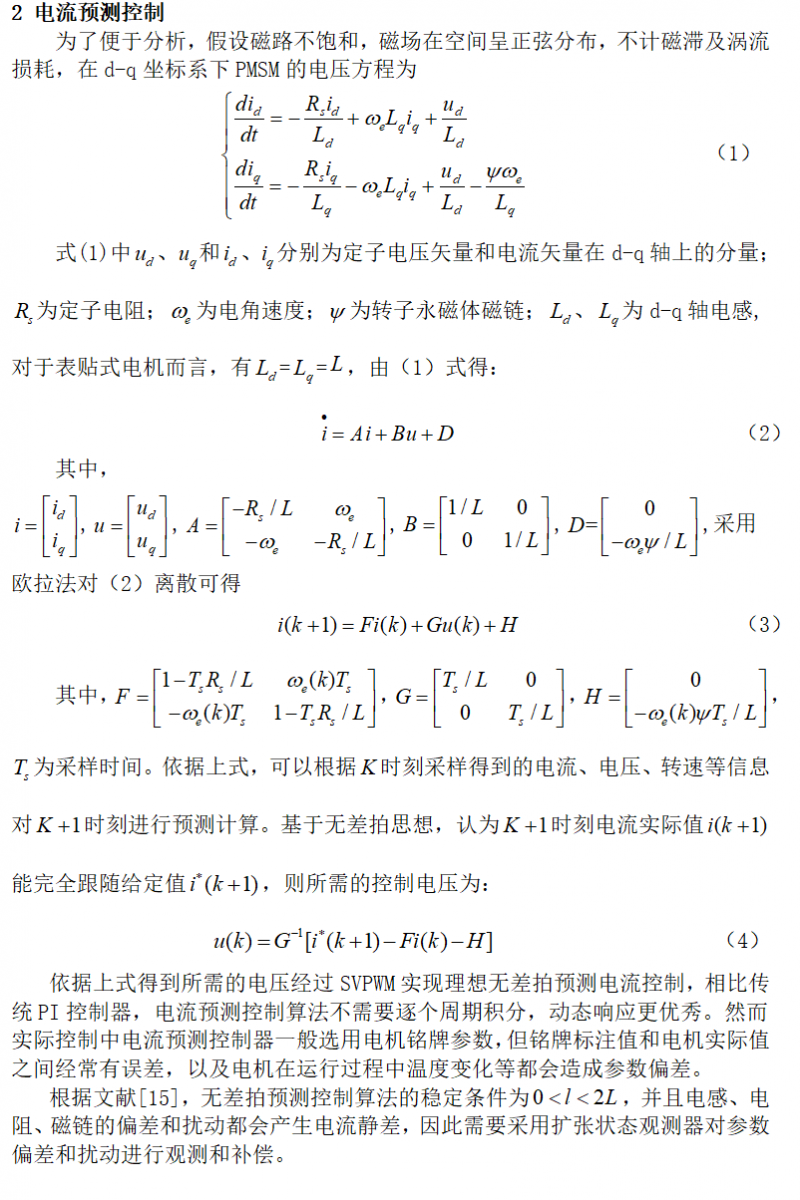
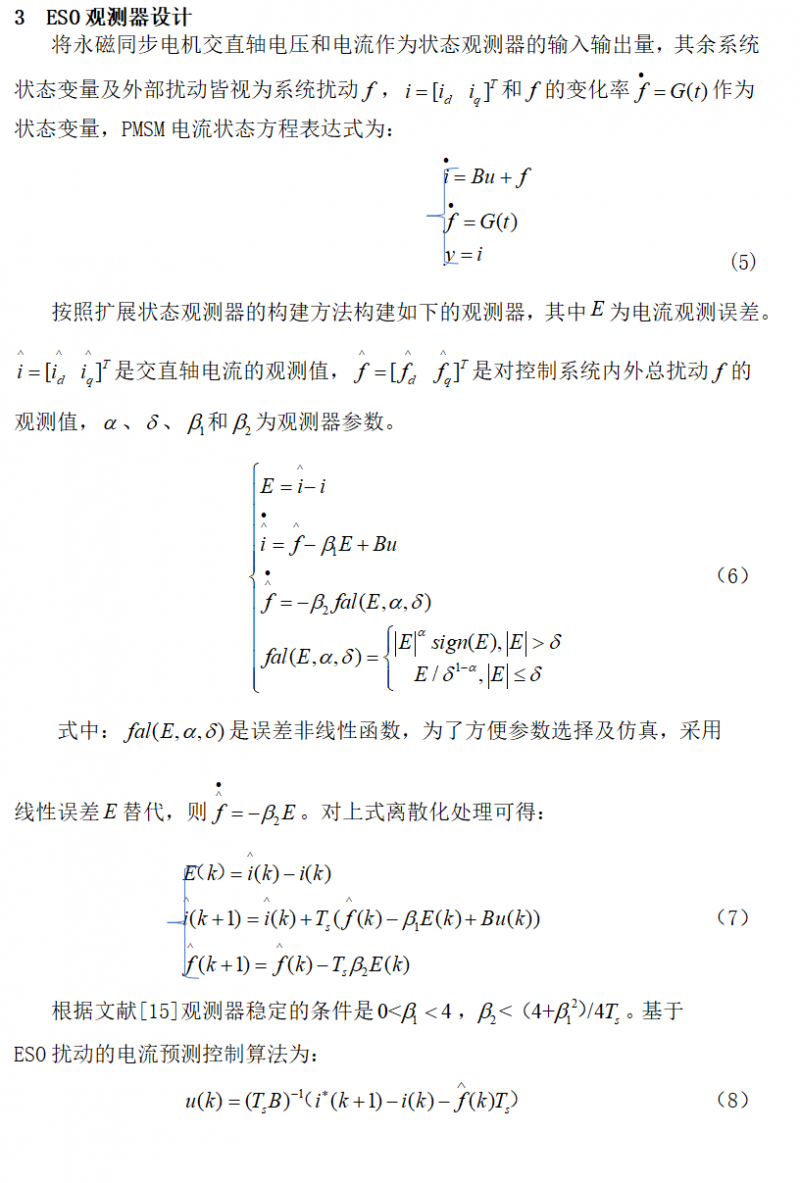
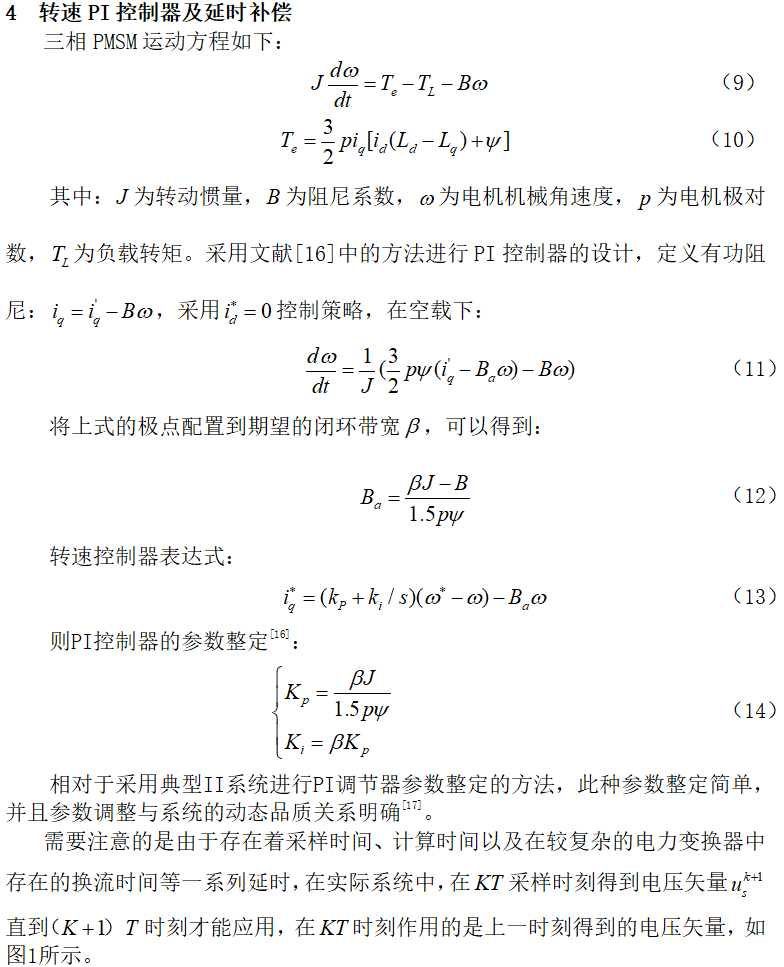
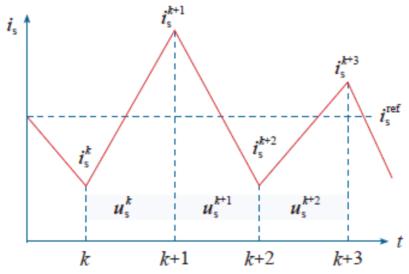
图1 一拍延时[18]

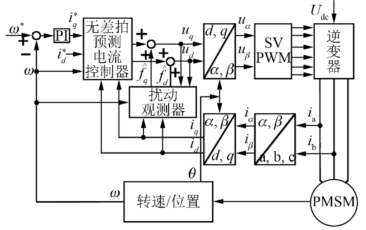
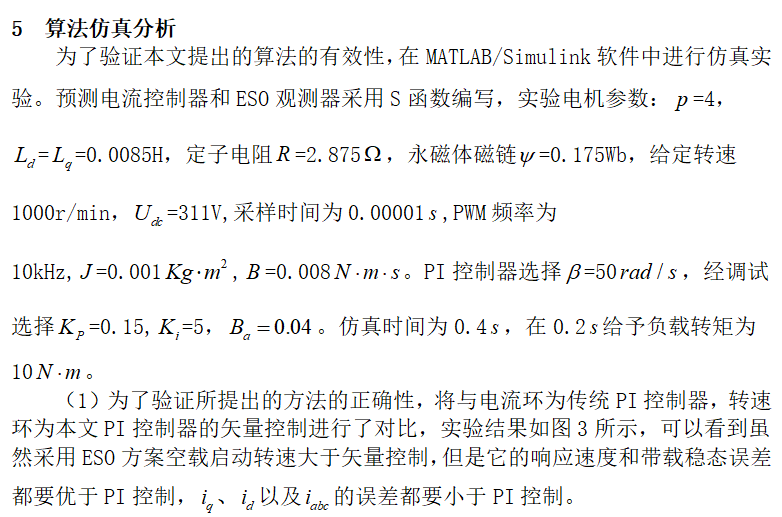
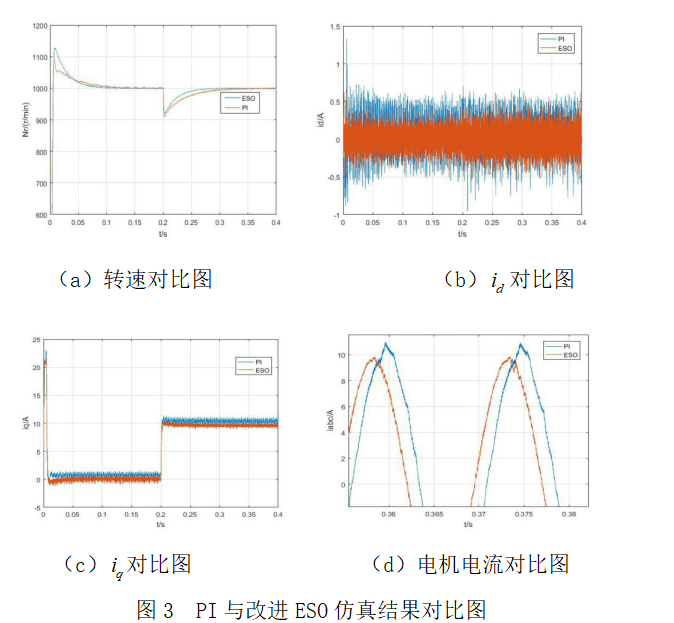
图2 系统框图[19]
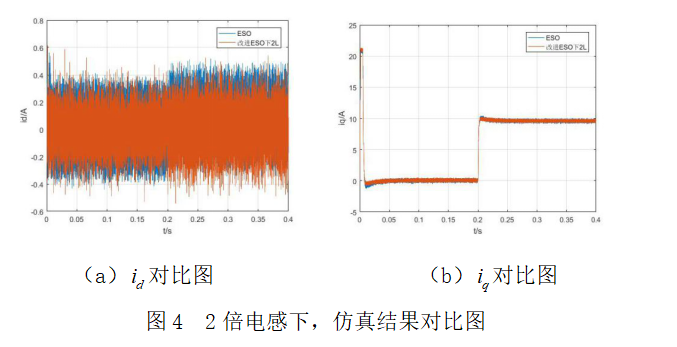
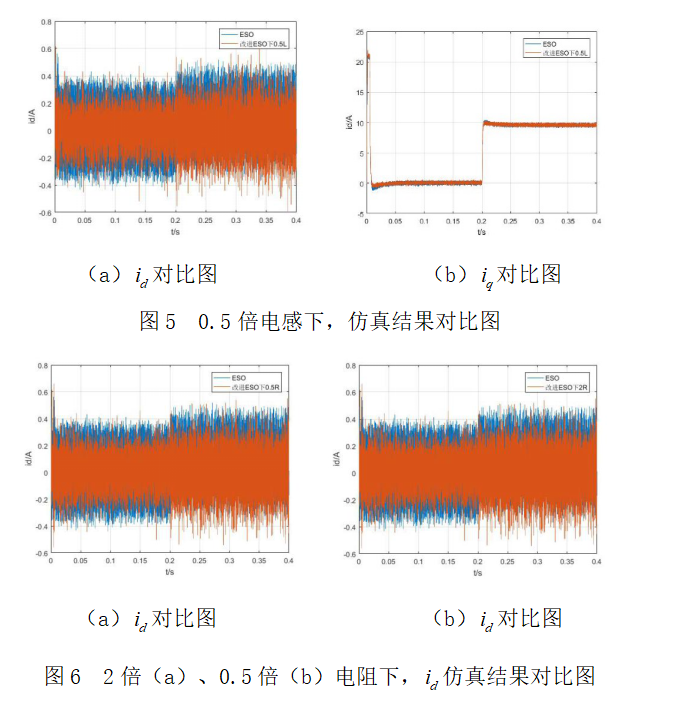
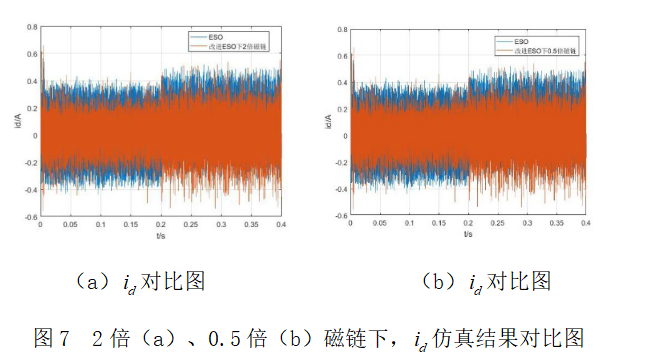
(2)为了验证本文设计方法在参数扰动下,仍具有良好的性能,分别将控制器中电感、电阻和磁链的参数设为2倍和0.5倍进行仿真。实验结果分别如图4-图7所示,可以看到![]() 、
、![]() 值基本没有变化,没有产生电流静差,证明了观测器的有效性。
值基本没有变化,没有产生电流静差,证明了观测器的有效性。
6 结束语
本文针对永磁同步电机无差拍电流预测控制中电机参数扰动偏差造成的输出电流静差及振荡问题,构建了ESO观测器,建立了基于观测器下的预测控制算法。采用有功阻尼概念对转速PI参数进行设计,并针对控制系统的延时进行了补偿。仿真结果本文方案的正确性。
参考文献
[1]EHASAN I M,GAO Y M,EMADI A. 现代电动汽车、混合动力电动汽车和燃料电池车—基本原理、理论和设计[M].倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2012.
[2]刘京,李洪文,邓永停, 基于扰动观测器的永磁同步电机电流环自适应滑模控制[J]. 光学 精密工程,2017,25(5):1229-1241.
[3]王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学报,2014,34(6):889-902.
[4]LEU V Q,CHOI H H,JUNG J W. Fuzzy sliding mode speed controller for PMSM with a load torque observer[I]. IEEE Transactions on Power Electronics, 2012,27(3):1530-1539
[5]EL SOUSY F F M. Intelligent mixed H2/H![]() adaptive tracking control system design using self-organizing recurrent fuzzy-wavelet-neural-network for uncertain two-axis motion control system[J]. Applied soft computing,2016,41:22-50.
adaptive tracking control system design using self-organizing recurrent fuzzy-wavelet-neural-network for uncertain two-axis motion control system[J]. Applied soft computing,2016,41:22-50.
[6]夏长亮,刘均华,俞卫,等.基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J]. 中国电机工程学报,2006,26(20) :139-143.
[7] 邓永停,李洪文,王建立,等.基于预测函数控制和扰动观测器的永磁同步电机速度控制[J].光学精密工程,2014,22(6):1599-1605.
[8] 牛里,杨明,刘可述.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6): 131-137.
[9] 王宏佳,徐殿国,杨明.永磁同步电机改进无差拍电流预测控制[J].电工技术学报,2011,26(6): 39-45.
[10] 牛里,杨明,王庚,徐殿国. 基于无差拍控制的永磁同步电机鲁棒电流控制算法研究[J]. 中国电机工程学报,2013,33(5):78-85.
[11] WANG W, XIAO X, DING Y. An adaptive incremental predictive current control method of PMSM[C]. Proceedings of the Conference on Transportation Electrification Asia-Pacific, IEEE,2014: 1-6.
[12] 薛峰,储建华,魏海峰. 基于龙伯格扰动观测器的永磁同步电机PWM 电流预测控制[J].电机与控制应用,2017,44(11).
[13] 易伯瑜,康龙云,冯自成. 基于扰动观测器的永磁同步电机预测电流控制[J]. 电工技术学报.2016,31(18).37-45.
[14] 张明晖,杨家强,陈磊,楼佳羽. 基于扩张状态观测器的永磁电机电流预测控制[J].浙江大学学报,2016,50(7):1387-1392.
[15] 刘博.基于扰动观测的永磁同步电机电流预测控制研究[D]. 哈尔滨:哈尔滨工业大学,2015.
[16] 袁雷,忧建清,肖飞,等.插入式永磁低速同步电机非奇异终端滑模观测器设计[J]. 物理学报, 2013 ,62(3) :030501.
[17] 袁雷,胡冰新,魏克银,等. 现代永磁同步电机控制原理及MATLAB仿真[M]. 北京:北京航空航天出版社,2016.
[18] 张永昌,高素雨.考虑延时补偿的永磁同步电机电流预测控制[J]. 电气工程学报,2016,11(3).
[19] 孙静,刘旭东. 基于无差拍预测控制和扰动观测器的永磁同步电机电流控制[J]. 电机与控制应用,2017,44(10).
作者简介:
王鹏跃 (1994-)男 大连交通大学 电气信息学院 主要研究方向:电机驱动控制






共0条 [查看全部] 网友评论