


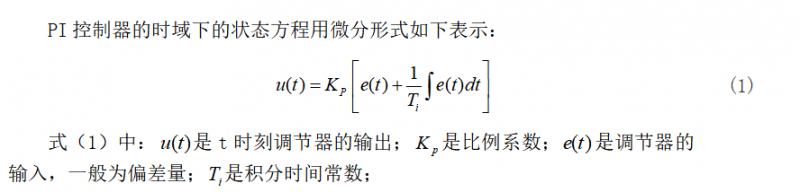
关键词:制动斩波器;滞环比较;PI控制;前馈+PI控制;直接占空比控制
Abstract: The locomotive is in resistance braking condition, in order to ensure the intermediate DC voltage does not exceed the allowable working voltage must be controlled resistance braking chopper in the middle part of the. The first is the use of traditional hysteresis control strategy, but the switching frequency control method in IGBT are generally not fixed, if IGBT switching frequency is not fixed, is likely to lead to the detection of voltage harmonic spectrum is mixed in a wide range, which will increase the difficulty of detecting voltage filter design, This is the limitation of hysteresis comparison control method. This paper analyzed PI control, feedforward +PI control and direct duty ratio control of the advantages and disadvantages of the three kinds of control strategies, combined with simulation and field experience, proposed direct duty ratio control strategy to achieve the premise of control objectives in the field application, a higher degree of safety.
Key words: Brake chopper; Hysteresis comparison; PI control; Feedforward + PI control; Direct duty cycle control
1 引言
本文主要研究机车在进行电阻制动时,如何控制中间环节制动斩波器使中间环节电压稳定在设定范围内。以往国内外常用的控制算法有滞环比较,PI控制,但滞环比较容易引进高频谐波干扰,PI控制存在参数整定问题,二者均对控制的精确性和安全性存在干扰,所以本文通过分析对比几种控制算法,最终得出直接占空比控制算法更精确、更安全。
2 滞环比较控制策略
2.1 滞环比较控制策略的分析
因过压保护电路是当中间环节出现短时过电压时导通,能够保证电路的安全可靠即可。采用滞环比较控制策略,给中间直流环节电压设置过压保护的电压上下限,当检测到的中间环节电压低于设定的电压下限值Umin,控制过压斩波器IGBT关断,切除过压保护抑制电阻;当检测到的中间环节电压高于设定的电压上限值Umax时,控制过压斩波器IGBT导通,将能量消耗掉,保证电压在设定的允许上下限范围内[1]。这种方法简单方便,波形基本在设定范围内波动。
工程实际中,电压的上下限值要合理选取。电压上限值选取过低,会导致IGBT频繁开断;电压的下限值选取过高,会导致抗干扰能力减弱,同样会造成IGBT频繁开断[2]。
结合机车实际运行参数,因主发电机负载时最高电压可达510V,与经不可控整流器整流到中间环节的直流电压有大约1.35倍的关系,即Ud=1.35Ui,为保证正常的电动运行,下限值按照中间电压的1.1倍选取,上限值按照中间电压的1.3倍选取,经计算,确定上限值为900V,下限值为800V。滞环比较控制原理图如图1所示。

图1 滞环比较控制原理图
Fig. 1 Schematic diagram of hysteresis comparison control
2.2 滞环比较控制策略的仿真
当机车因意外引起中间环节瞬时能量出现时,启用过压保护电路,一般持续能量比较小,因此用功率模块模拟该意外工况,设置0.01s施加55kW的功率,0.05s施加30kW的功率,0.1s施加25kW的功率,可用图2所示模型代替,进而将其进行封装构成制动功率模块。图2中用Timer模块代表意外功率。如图3所示,用Relay模块代表滞环比较模块,设定上下限值,检测电压值进入,大于上限值,输出1,小于下限值,输出0;其后跟随convert模块,进行数据类型转换。
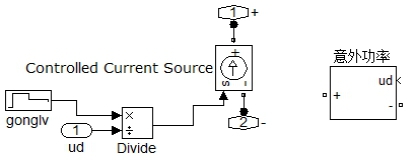
图2 功率模块
Fig. 2 Power module
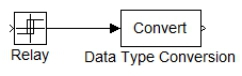
图3 滞环比较模块
Fig. 3 Hysteresis comparison module
根据过压保护电路建立仿真模型如图4所示,中间支撑电容C由电容和杂散电感、杂散电阻构成,参数分别为0.012F、0H和0.0001Ώ,初始电压设为700V,Cf1为线路杂散电感和杂散电阻,参数分别为0.0000005H和0.0001Ώ;IGBT和二极管Diode1选择Simulink自带模型和默认参数;电阻R=12Ώ;工况采用0.01s施加55kW的功率,0.05s施加30kW的功率,0.1s施加25kW的功率组成的功率模块;仿真时间为t=0.2s。
要求过压保护电路0.2s必须完成控制调节。如图5所示,该过压保护电路在滞环比较控制策略下的仿真图,电压波形在800V~900V之间稳定波动,并且看出电路在0.1s内就可以完成调节,符合要求,且速度和稳定性良好。
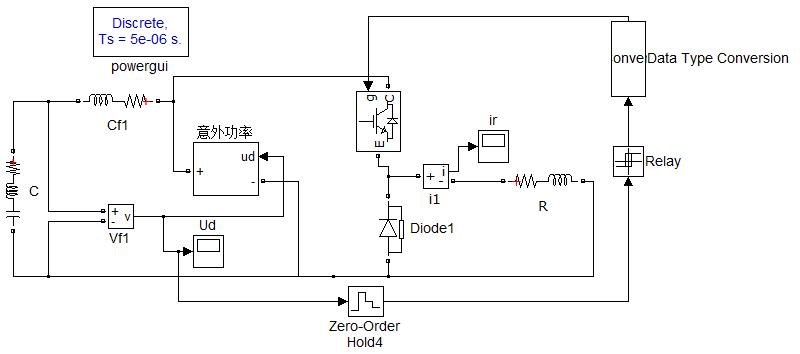
图4 整体仿真
Fig. 4 Whole simulation
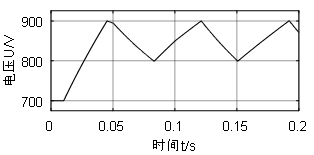
图5 中间电压图
Fig. 5 Intermediate voltage diagram
3 PI控制策略
(1) PI控制原理
在工程实践中,机车运行于电阻制动工况下时,为使中间环节直流母线电压稳定在某一设定值,普遍采用PI控制器调节来实现[3]。因为考虑到内燃机车牵引传动系统时滞性较小的特性,通常不会引入微分环节,因为微分环节极易引起系统振荡,容易产生危害。在我们对被控对象、系统传递函数不完全确定的情况下使用PI调节容易方便实现,而且具有调整简单、方便和可靠性相对较高的优点[4]。PI控制原理图如图6所示。

图6 PI控制原理图
Fig. 6 PI control schematic diagram
(2) PI控制仿真
这里的控制策略采用PI结合滞环比较控制一起作用。当检测到的中间环节直流电压小于800V时,PI和滞环比较器均不起作用,IGBT抑制关断;当检测到的中间环节直流电压大于800V时,并且小于900V时, PI控制器作用调节占空比,控制IGBT的导通。当检测到的中间环节直流电压大于900V时,滞环比较器起作用,以避免工程实际中恶劣情况引起的很大过电压,使IGBT导通,进而调节电压,使其降低,提高安全系数。此控制器的模型如图7所示。
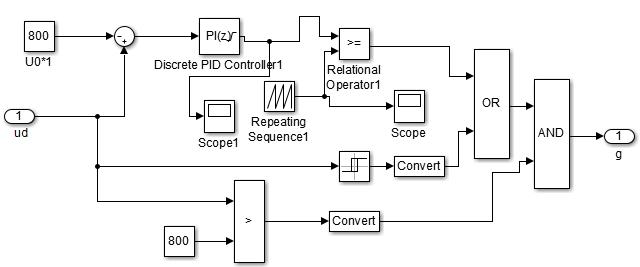
图7 PI控制模块
Fig.7 PI control module
仿真参数如上述章节。本文通过试凑法,仿真时取0.00000005s。仿真模型如图8所示。取KP=60时,I=20经仿真电压波形如图8所示。电压基本在设定值800V附近波动,误差达到6V左右,误差精度达到0.75%。
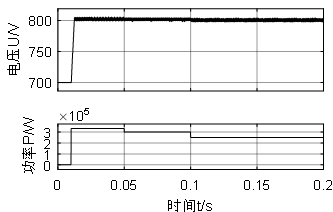
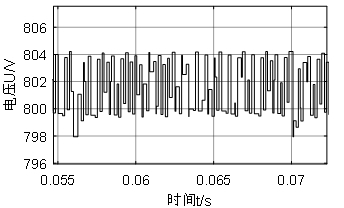
(a)中间电压和制动功率 (b)中间电压局部放大
图8 中间环节电压
Fig. 8 Intermediate link voltage
4前馈+PI控制策略
(1) 前馈+PI控制原理
前馈控制的实质是可以在被控量变化之前通过控制干扰量来补偿干扰量对被控量的影响。前馈控制如果运用得当,会完全抵消干扰对被控量的影响[5]。机车进行电阻制动时,实质是为了实现电制动反馈到中间环节的制动能量与制动电阻消耗的能量平衡,通过控制IGBT的导通占空比控制中间环节电压反映这一问题。制动时,对于不同的制动功率,相同的中间环节电压的给定值,占空比也不一样,即实质上是制动功率影响了占空比,导致了电压的变化[6]。所以本文利用前馈控制的思想,针对不同制动功率下有不同占空比,将占空比的调节分为两部分。一部分根据直流侧电压给定值直接计算占空比,另一部分为直流环节电压给定值与反馈值之间的差异通过PI调节产生的占空比,将两部分的占空比相加得到控制斩波器的最终占空比。控制策略原理图如图9所示。
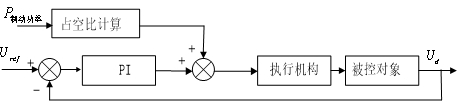
图9 前馈控制原理图
Fig. 9 Feedforward control schematic diagram
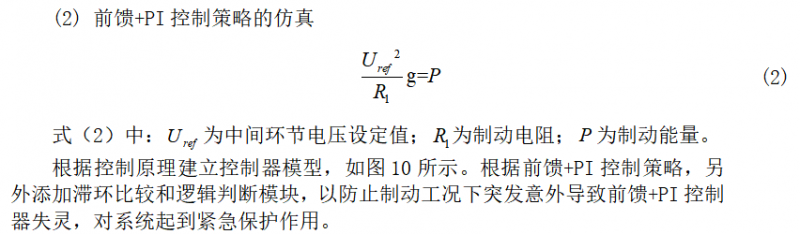
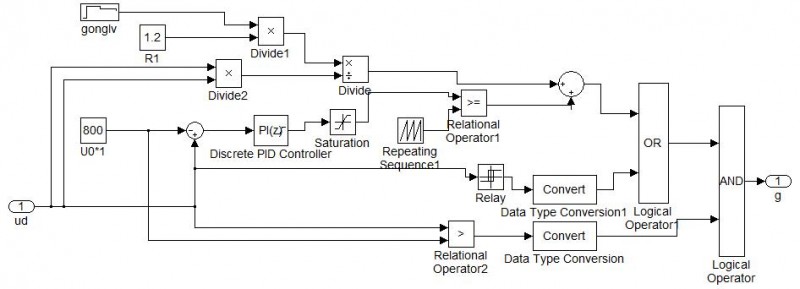
图10 前馈+PI控制模块
Fig. 10 Feedforward +PI control module
根据第二小节的参数建立仿真模型,只改变控制器模块,PI的整定同前述章节。
直流侧电压如图11所示,不同制动功率下,经调节后的电压基本稳定在设定值800V附近,电压误差基本在5V以内波动,误差精度可达0.625%。
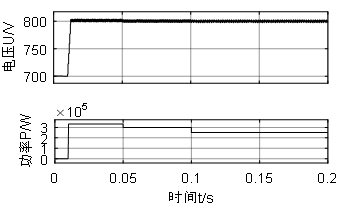
(a)中间电压和制动功率 (b)中间电压局部放大
图11 中间环节电压
Fig. 11 Intermediate link voltage
5直接占空比控制策略
考虑到实际中做制动实验时,不管是比例还是积分调节,如果控制不好,均会产生振荡,对系统造成严重破坏。为保证电阻制动时不消耗发电机输出的电能,以低于800V时不导通,即导通比为0;大于等于900V时全导通,即导通比为1为原则,控制导通比线性变化。该方法能够保证开关频率一定,只让导通比线性变化。导通比满足如下关系:
 (3)
(3)
采用以上控制方式,对不同制动功率的工况进行仿真观察仿真结果。线性控制模型如图12所示。
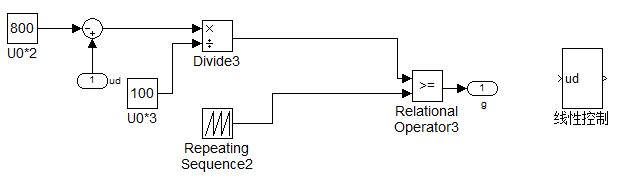
图12 直接占空比控制模块
Fig. 12 Direct duty cycle control module
根据制动斩波电路建立仿真模型同第二小节,区别在于,在制动电阻R含有杂散电感,参数分别为1.2Ώ,0.000001H;制动功率分别为P=300kW和P=250kW;仿真时间t=0.2s的条件下进行仿真。整体仿真如图13所示。
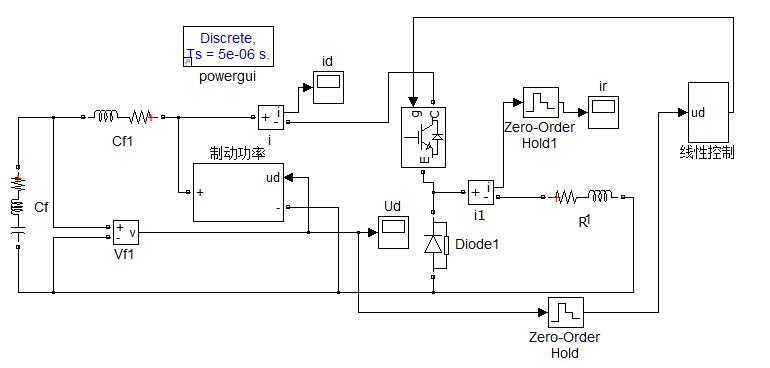
图13 整体仿真
Fig. 13 Whole simulation
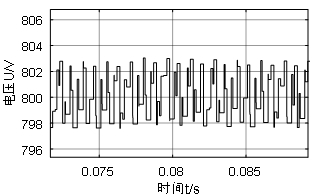
根据模型仿真,观察到的直流环节电压变化情况如图14所示。在0.01s后施加P=380kW的制动功率,0.05s之后施加300kW的制动功率,0.1s之后施加250kW的制动功率,相对应的电压分别稳定在865V、851V和845V附近,即不同制动功率下,中间环节电压在允许的800V~900V范围内波动,但均能稳定,只是功率较大时,稳定的电压较高,但也是低于最大允许电压。这种方式,不仅避免了PI可能引起的振荡;而且相对滞环而言,开关频率一定,避免了滞环控制因频率不固定而引起的谐波问题;安全性高,值得采用,每段误差稳定在7V以内,精度达0.875%。
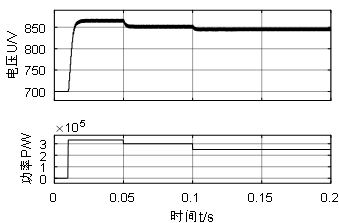
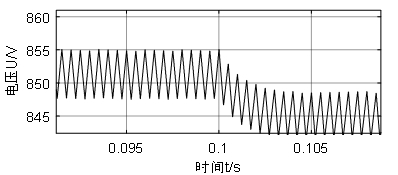
(a)中间电压和制动功率 (b)中间电压局部放大
图14 中间环节电压
Fig. 14 Intermediate link voltage
6 总结
通过上述控制策略的分析仿真,发现PI控制策略和前馈+PI控制策略虽然能使电压在设定值附近小幅波动,但存在参数整定问题,而且工程实际中,任何变工况下,参数整定不当时会引起中间环节电压振荡超限,损坏逆变器,危险程度高。因本文控制目标是保证直流环节电压在允许工作范围内,相对比而言,直接占空比控制策略简单实现,不会引起电压振荡,并且能保证电压稳定在允许范围内,且稳定误差小,实验中采取直接占空比控制策略,安全可靠,效果良好。
参考文献:
[1]巩思茜.高速列车永磁牵引电机同步控制建模与仿真研究[D]. 浙江大学,2013.
[2]段继超.地铁车辆制动控制系统设计[D]. 西南交通大学,2012.
[3]邵健帅.高速动车组制动系统的研究与分析[D]. 西南交通大学,2015.
[4]高振强.工矿车电阻制动装置的虚拟设计平台的研究[D]. 兰州交通大学,2015.
[5]冯江华.高速动车组永磁同步牵引系统的研制[J]. 机车电传动,2016(04):1-5.
[6]高丽华.内燃机车交流传动控制系统的研究[D]. 太原科技大学,2009.
附作者简介:王新,出生日期:1991.08.01,性别:女,民族:汉族,籍贯:山东省泰安市新泰市,硕士研究生学位,职称:助教,职务:黑龙江交通职业技术学院教师,主要研究方向是电力电子与电力传动、电阻制动、电机控制。




共0条 [查看全部] 网友评论