


关键词:直接转矩控制;低速性能;磁链观测器
Abstract: Compared with vector control, direct torque control system does not need complex decoupling of the vector control, direct to control flux linkage and torque of the motor, by calculating the torque and stator flux linkage deviation to determine the voltage vector, the control system for the motor. But when low speed, due to the presence of stator resistance voltage drop, the observation of the stator flux linkage has larger deviation, make the motor at low speed run-time speed control performance is difficult to control. Therefore, it is to improve its performance, low speed performance of flux linkage and use limiter and phase Angle compensation method of fuzzy controller, to achieve direct torque control system of the purpose of flux observation accuracy at low speed, and through the simulation results verify the effectiveness of the method.
Key words: Direct torque control; Performance at low speed; Flux observe
1 引言
直接转矩控制方法广泛应用于电机控制领域,该方法主要通过滞环比较器直接输出转矩和定子磁链的偏差,了解电机的运行状况,选择适当的电压矢量调整电机使其稳定运行,与矢量控制方法相比,其具有算法简单,响应速度快,转矩脉动小,动态性能好等优点[1]。其中,定子磁链的观测精度是提高直接转矩系统性能的关键之一。尤其模型在低速时,定子电阻的影响更明显,使其不能有效地对定子磁链进行准确估测。目前,磁链观测的主要方法有电压模型和电流模型。其中电流模型主要应用于低速段的磁链观测,该方法避免了定子电阻对磁链观测的影响,但同时引用了转速等参数产生了其他测量不精准的问题。
在高速时,电压模型拥有较好的磁链观测性能,其算法过程简单,避免了许多不确定因素。但电压模型中使用的积分环节,导致直流分量的积分饱和,引起磁链观测的较大偏差。因此,采用一阶低通滤波器来代替积分环节,可以有效的减少对直流分量积分的误差。同时,运用低通滤波器代替纯积分环节的方法使得观测的相位和幅值将有较大的偏差。在低速段时,造成的误差更大,影响系统运行的性能。对于这种偏差,通常采用一些算法进行纠正和补偿[2,3]。本文采用闭环反馈的幅值补偿和模糊控制器的角补偿的方法,对现有的磁链观测器加以改进。
2 直接转矩控制原理
传统直接转矩控制系统主要利用转矩和磁链的滞环控制来实现,根据两个滞环比较器输出的开关信号和定子磁链所在的扇区号,并利用开关表选择相对应的开关状态,输出合适的电压空间矢量来控制逆变器,从而实现对电机转矩和磁链的直接控制。传统直接转矩控制系统的整体结构如图1所示。
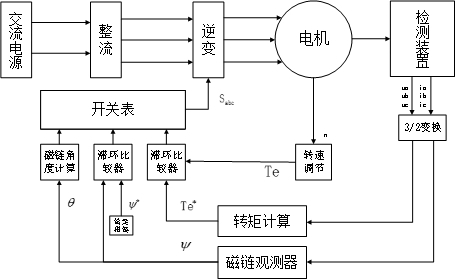
图1 直接转矩控制系统结构图
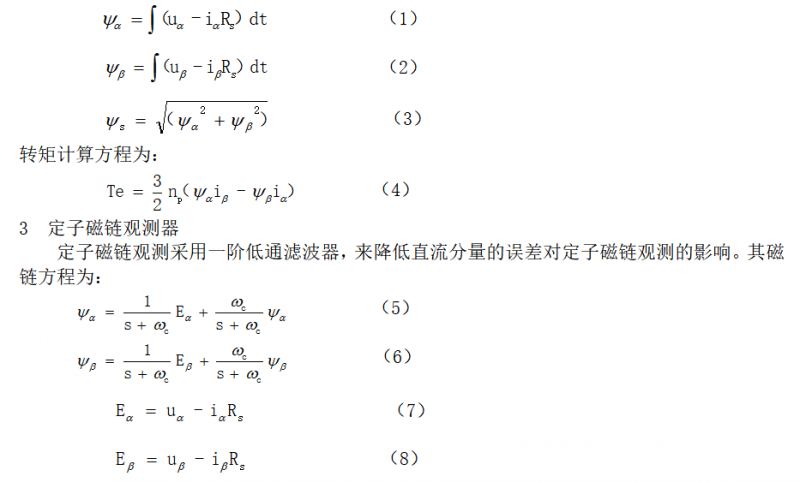
定子磁链的观测采用空间矢量的数学分析方法,建立在静止α-β正交定子坐标系上,一般采用u-i模型,其磁链方程为:
![]()
为了抑制直流偏置量,采用的低通滤波器代替纯积分环节会存在幅值和相位的误差。从公式可以看出,误差的大小与所设定的截止频率ωc有关[4]。如果截止频率选的太小,会使直流偏置的衰减很慢,高速时系统运行的稳定性较差。如果截止频率选的太大,会使低速段的磁链误差较大,没有解决纯积分环节的问题关键。因此,根据转速的变化,调节截止频率的大小,使得系统改善了低速的磁链观测性能,同时也保证了高速段的运行稳定[5,6]。
在磁链观测器的闭环反馈环节,利用坐标变换的方法,变换到极坐标系,再对幅值进行限制。这样不仅对幅值加以限制,同时也保证了相位角不变,避免了磁链波形的畸变。在未达到限幅时,仍旧输出积分的结果,而在达到限幅时,定子的磁链幅值将一直保持额定磁链值。再引入模糊控制器,对磁链的相位角进行补偿。幅值和相位补偿的磁链观测器如图2所示。
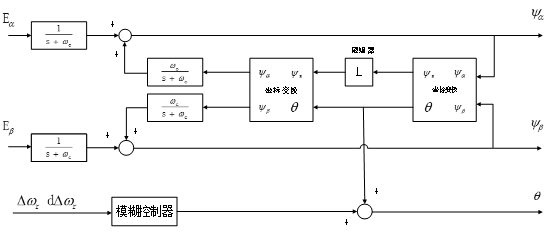
图2 幅值和相位补偿的磁链观测器
4 相位补偿模糊控制器
低通滤波器所造成的定子磁链角误差选用模糊控制器对相位角进行补偿,以此降低转矩和速度的误差。磁链角误差的补偿量根据转速的误差来进行计算。输入量隶属函数如图3所示。输出量隶属函数如图4所示。模糊控制器采用二维输入、一维输出,输入量为转速误差和转速误差的变化量:
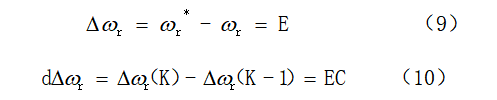
输出量为磁链观测角的补偿量:
![]() (11)
(11)
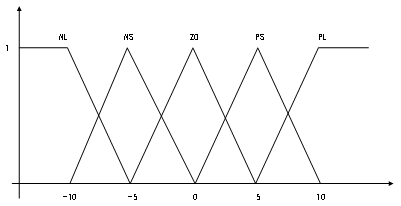
图3 输入量隶属函数
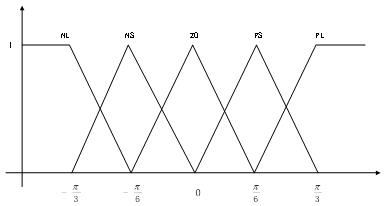
图4 输出量隶属函数
E、EC和θc定义模糊子集为{PL、PS、ZO、NS、NL},根据低速运行状态选取输入输出量的范围。E、EC范围为(-10,10),θc范围为(-π/3,π/3)。模糊控制器采用mamdani算法,每条规则都用E、EC和θc来描述[7]。模糊控制表如表1所示。
表1 模糊控制表
|
E EC |
NL |
NS |
ZO |
PS |
PL |
|
NL |
NL |
NL |
NL |
NS |
ZO |
|
NS |
NL |
NS |
NS |
ZO |
PL |
|
ZO |
NL |
NS |
ZO |
PS |
PL |
|
PS |
NL |
ZO |
PS |
PL |
PL |
|
PL |
ZO |
PL |
PL |
PL |
PL |
5 系统仿真模型
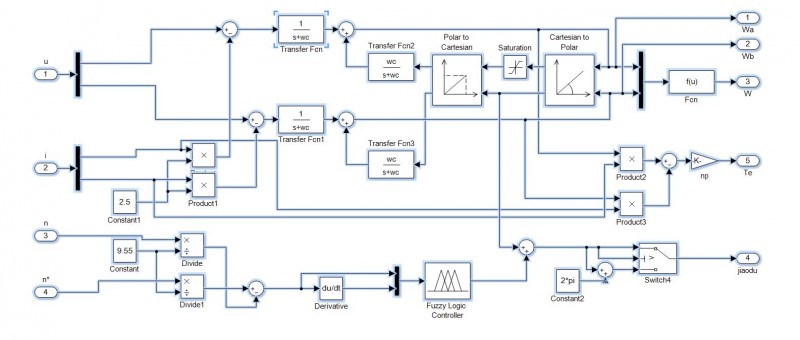
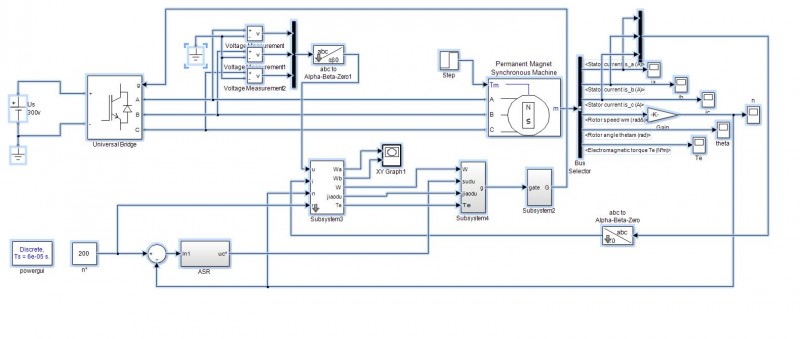
传统的直接转矩控制采用纯积分的磁链观测方式,虽然磁链近似圆形,但磁链还是存在较大误差,稳态时转矩和转速波动较大。MATLAB系统仿真模型图如图5(a)和(b)所示。
(a)
(b)
图5 MATLAB系统仿真模型图
运用磁链幅值和相位补偿的磁链观测去进行磁链观测可以使磁链轨迹很好地逼近圆形,而且转速和转矩的脉动大大减少[8]。
仿真时,主要参数:Udc=300V,f=50Hz,Rs=2.85mΩ,Ld=14mH,Lq=14mH,p=2,J=8e-4kg*m^2,ψ=0.2Wb,n=200rpm。传统直接转矩系统磁链轨迹图如图6所示,改进后的磁链轨迹图如图7所示,传统直接转矩转速响应曲线如图8所示,改进后的转速响应曲线如图9所示,传统直接转矩的转矩曲线如图10所示,改进后直接转矩的转矩曲线如图11所示。
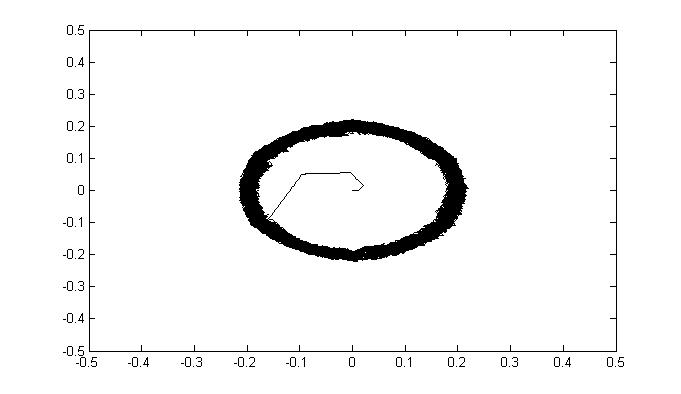
图6 传统直接转矩系统磁链轨迹图
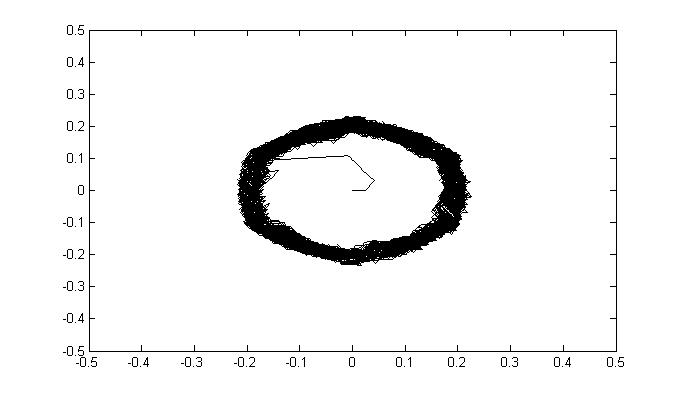
图7 改进后的磁链轨迹图
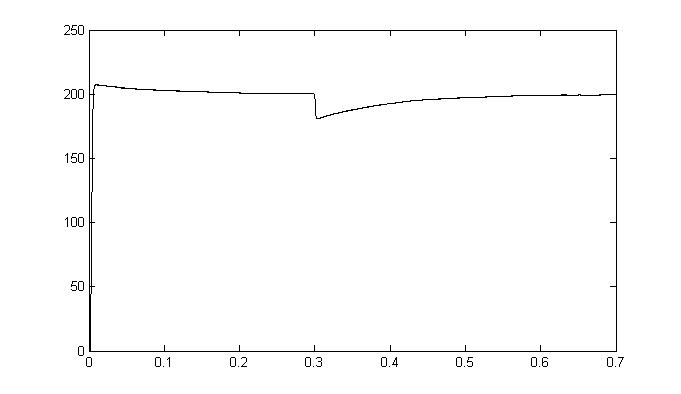
图8 传统直接转矩转速响应曲线
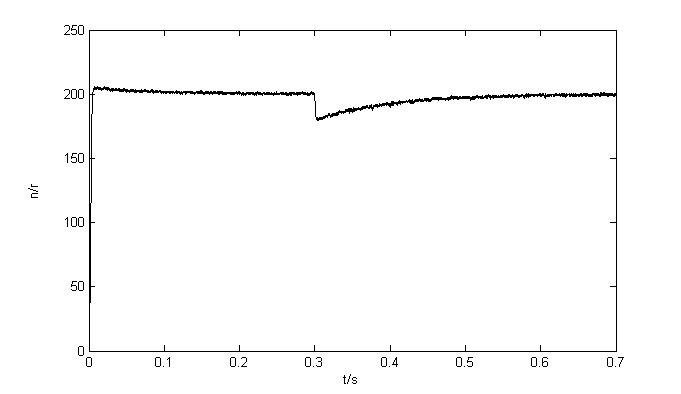
图9 改进后的转速响应曲线
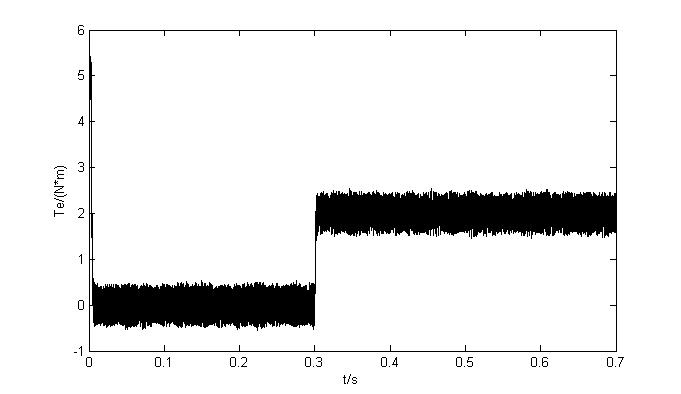
图10 传统直接转矩的转矩曲线
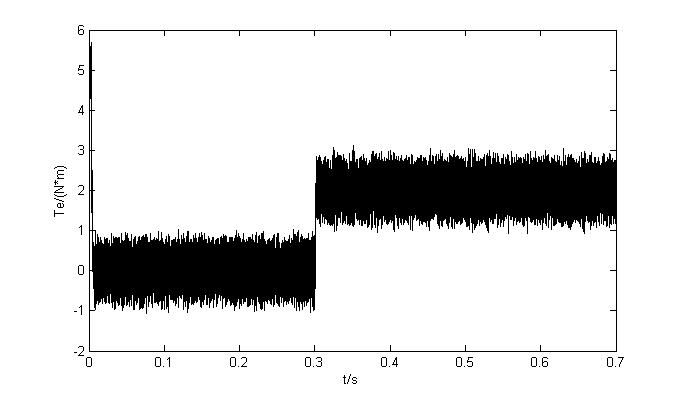
图11 改进后直接转矩的转矩曲线
仿真实验结果表明,利用闭环反馈的幅值补偿和模糊控制器角补偿的方法,有效地减小了低通滤波器造成的定子磁链角的误差。通过对磁链观测器的改进,低速时转速和转矩的整体性能有明显的提高,电机加载时的动态性能和响应速度也有着很大的提升[9,10]。
6 结论
本文主要对直接转矩控制中的磁链观测环节加以改进,应用了幅值补偿的低通滤波器,并引用模糊控制器补偿定子磁链角的误差,改进了原有的磁链观测器。通过对传统直接转矩控制磁链观测的电压模型的改进,使得磁链观测性能得以改善,转矩和转速的脉动减少,改善了低速时电机的性能。仿真结果证明了改进磁链观测器补偿方法的有效性。
参考文献:
[1]杨祖泉, 姚绪梁, 舒小芳. 异步电动机直接转矩控制系统的仿真研究[J]. 电机与控制报, 2004.
[2]Jixiong Wu, Yongdong Li, Jie Chen. Speed sensorless direct torque control of an induction machines in low speed region[A] . IPEMC 2000[C] . Beijing, china, 2000:464- 468.
[3]李黎明, 申太群. 一种改善直接转矩控制低速性能的新方法[J]. 防爆电机, 2005, 3(40): 9-12.
[4]葛兴来, 齐永龙, 冯晓云, 陶若冰. 直接转矩控制低速运行区段的建模与仿真研究[J]. 电气传动自动化,2003.25(1).
[5]黄祯祥, 郭延文, 廖剑霞,等. 直接转矩控制系统磁链区间细分控制的应用[J]. 电力系统及自动化学报.2008:20(1):61-65.
[6]祝龙记,王汝琳. 基于直接转矩控制的高性能磁链观测与速度观测[J], 电机与控制学报, 2004, 8( 3) .
[7]张旭,瞿文龙. 一种低速下磁链观测补偿的新方法[J] .电工电能新技术, 2003, 25( 1).
[8]赵文峰. MATLAB控制系统设计与仿真[M]. 西安: 西安电子科技大学出版社.2001.
[9] Jun Hu, Bin Wu. New integration algorithms for estimating motor flux over a wide speed range[J]. IEEE Trans .on Power Electronics, 1998 , 9:969-977.
[10]夏扬. 基于SIMULINK的感应电机建模及仿真研究[J]. 电气传动化,2002,24(1):3-6.
作者简介:
侯程,1993,04,13,男,硕士研究生,研究方向:电力电子与电力传动。




共0条 [查看全部] 网友评论