


关键词:开关磁阻电机;转矩脉动;模糊逻辑规则;转矩斩波控制
Abstract: Switched reluctance motor has been widely used in home appliances, industrial manufacturing, aerospace and other fields due to its simple structure, low cost, high efficiency and good fault tolerance. However, its unique stator and rotor double salient pole structure leads to relatively large torque ripple on operation time, which causes the motor to vibrate, and limits the practical application of the switched reluctance motor. In order to reduce the torque ripple, this paper studies the control strategy of the torque ripple suppression of the switched reluctance motor, introduce fuzzy logic rules into the torque hysteresis controller and proposes a new type of torque chopper controller.
Key words: Switched reluctance motor; Torque ripple; Fuzzy logic rules; Torque chopper controller
1 引言
开关磁阻电机(Switched Reluctance Motor, SRM)最早是在19世纪40年代由英国人Aberdeen和Davidson提出的,之后由于高速开关器件的研发成功加上控制技术、仿真技术的飞速发展,开关磁阻电机在家电产品、工业机械以及航空航天领域都得到了广泛应用[1],但由于其独特的双凸极结构及磁路的高饱和性使其呈现非线性带来的转矩脉动是影响其发展的重要一环,所以如何抑制开关磁阻电机转矩脉动成为了其研究热点之一。文献[2]针对传统电流斩波方式存在很大转矩脉动及噪声问题,提出了电流限波动双幅值斩波控制方法,仿真结果显示转矩脉动得到很大改善,但仅在低速时效果比较突出,高速时仍有很大转矩脉动。文献[3]研究将人工神经网络(Artificial Neural Network,ANN)运用到转矩脉动抑制上,利用转矩分配函数(TSF)得到给定的转矩及转子位置,再利用ANN调节为电流,与反馈回的电流形成闭环控制,从而有效降低转矩脉动,但ANN计算对处理器性能要求较高。文献[4]提出一种基于转矩分配函数(Torque Sharing Function, TSF)的直接瞬时转矩控制(Direct Instantaneous Torque Control, DITC),能根据当前运行状态实时确定当时的转矩分配,但实现实时跟踪有一定难度。
本文借鉴基于电流斩波控制,结合基于TSF的DITC系统设计,设计一种应用于SRM的转矩斩波控制器,实现减小转矩脉动的目的。
2 SRM工作原理
开关磁阻电机遵循磁通总是沿着磁导最大的路径闭合的原理,在磁拉力的作用下产生磁阻性质的转矩。
具体工作原理如下:当定转子的凸极中心线处于相对位置时,定转子的凸极主轴线与磁场轴线相重合,如图1所示,A相定子凸极轴线A1-A3、A2-A4分别与转子凸极轴线‘1-1’、‘3-3’相重合。当轴线处于其他位置时,转子不是位于磁阻最小的状态。因转子凸极处于定子绕组产生的磁场中,会产生一种作用力拉动转子转到磁阻最小的状态。这种作用力称为磁阻电机转动运行的切向磁拉力。若按一定顺序分别导通各相绕组,电机就会按绕组导通顺序转动,改变通入相电流的值,就可以改变电机的输出转矩,进而改变转速大小。

图1 三相12/8极SRM工作原理图
导通原理如图1所示,当A相绕组导通时,A1-A3、A2-A4轴线方向上会产生相应磁场,转子的凸极中心线‘1-1’、‘3-3’分别与A1-A3、A2-A4轴线重合。因该回路磁阻最小,没有切向磁拉力,转子不会转动。若断开A相绕组的同时导通B相绕组,此时B相产生的磁通回路磁阻不是最小,会在气隙中产生弯曲的磁力线,进而产生一种拉力,促使转子旋转到其轴线‘2-2’、‘4-4’余B相定子凸极轴线B1-B3、B2-B4相重合的状态。若按此方式,依左图所示位置为起点,依次按A→B→C→A相的顺序通入电流,转子会按顺时针方向持续转动;反之若按A→C→B→A相的顺序通电,SRM则按逆时针方向转动。由此可知,SRM的转动方向仅与电机各相的通电励磁顺序有关,与绕组电流方向无关。
3 TSF
3.1 TSF原理
转矩分配策略主要是将期望转矩分配到各相绕组上,使绕组产生的转矩之和等于期望转矩,从而实现转矩恒定,抑制转矩脉动。TSF主要有直线型、正弦型、余弦型以及梯形型等,具体选择哪种TSF要依据实际要求得到,这儿我们选择正弦型TSF。
3.2 基于TSF的DITC系统
由SRM的工作原理可知,当其处于换相时刻,下一相产生的转矩增加量无法在瞬间补偿当前相关断时的转矩减小量,从而导致瞬时转矩总会出现波动。针对这个问题,TSF将换相时刻的转矩重新分配,使各相转矩之和等于期望转矩,减小这种波动。如图2所示,设置期望转矩 ,通过TSF单元,将期望转矩按转矩分配函数关系分配到各相绕组,产生三相参考转矩,与三相定子电流经过转矩估算单元输出的各相绕组转矩形成偏差计算,控制滞环控制器占空比输出,从而实现直接转矩控制SRM运行。
,通过TSF单元,将期望转矩按转矩分配函数关系分配到各相绕组,产生三相参考转矩,与三相定子电流经过转矩估算单元输出的各相绕组转矩形成偏差计算,控制滞环控制器占空比输出,从而实现直接转矩控制SRM运行。
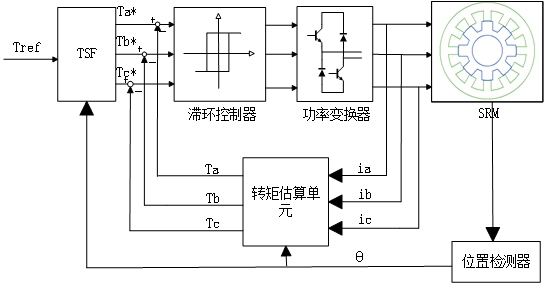
图2 基于TSF的DITC系统
3.3 转矩斩波控制器的设计
传统转矩滞环控制器设计为当实际转矩小于期望转矩时,功率变换器状态切换为上下桥臂均导通;当实际转矩大于期望转矩时,功率变换器切换为上桥臂关断,下桥臂仍导通;当实际转矩再增大到大于期望转矩时,功率变换器切换为上下桥臂均关断;但这种导通关断方式会造成不稳定,波形尖峰比较突出,为此我们引入模糊逻辑规则到转矩滞环控制器中,具体实现规则如下:
当转矩误差为[0,h][0,2h],[0,3h],[0,4h],[0,5h]范围内时,低电平的占空比分别为20%、40%、60%,80%、100%;
当转矩误差为[-h,0][-2h,0],[-3h,0],[-4h,0],[-5h,0]范围内时,高电平的占空比分别为20%、40%、60%,80%、100%;
其中h为期望转矩的一定比值,可自行设定精度。
基于模糊逻辑规则的转矩斩波控制如图3所示。
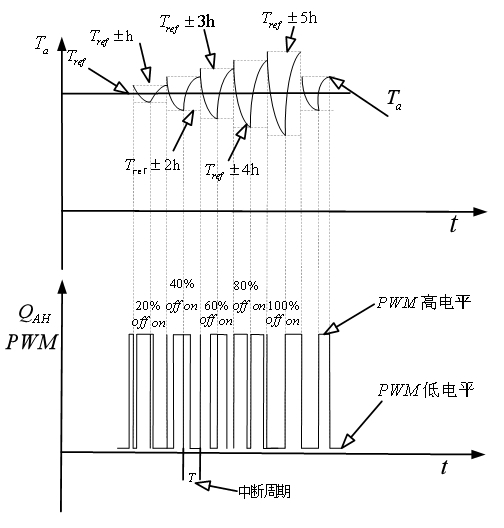
图3 基于模糊逻辑规则的转矩斩波控制
4 结论
针对传统滞环控制器存在波形尖峰突出不够平滑的缺点,本文基于转矩分配函数的直接转矩控制系统设计,并引入基于模糊逻辑规则的转矩斩波控制器,能够做到优化转矩波形输出,尽力减小与期望转矩的偏差,减小转矩脉动,具有一定实际应用价值。
参考文献:
吴建华. 开关磁阻电机设计与应用[M]. 北京:机械工业出版社,2000
王旭东, 王喜莲, 王炎, 等. 开关磁阻电动机电流双幅值斩波控制[J]. 中国电机工程学报, 2000(04): 84-87.
Gouda E, Hamouda M, Amin A R A. Artificial Intelligence based Torque Ripple Minimization of Switched Reluctance Motor Drives[J]. Proceedings of 2016 Eighteenth International Middle East Power Systems Conference (Mepcon), 2016: 943-948.
李珍国,阚志忠. 开关磁阻电机的高效率直接瞬时转矩控制[J]. 电工技术学报,2010,25(08):31-37+51.
作者简介:
杨亭(1995-)男 硕士在读 研究方向:开关磁阻电机转矩脉动抑制技术




共0条 [查看全部] 网友评论