


关键词:四象限整流器;模型预测控制;功率控制;电压矢量
Abstract: The control strategy of four-quadrant rectifier is a research hotspot in the traction drive system of EMU.As an important converter in the transmission system the two-level rectifier has the advantages of simple structure, convenient maintenance and reliable control. This paper introduces the power control strategy of two - level four quadrant rectifier based on model predictive control. By establishing the discrete time model of the system, the voltage vector with minimum cost function is selected. The model predictive control is compared with the traditional direct current control by Simulink. The result shows that the model predictive control strategy can effectively control the output voltage vector of the rectifier and has better performance than traditional control strategy.
Key words: Four quadrant rectifier; Model predictive control; Power control; Voltage vector
1 引言
目前两电平四象限整流电路在电力电子装置中被普遍采用,也是现阶段电力机车牵引领域中研究较为透彻、技术较为成熟的整流器拓扑结构之一,但与多电平电路相比,器件耐压值的需求和网侧谐波含量相对较大[1],通过控制策略可以改进。对于四象限整流器网侧电流的控制策略主要以直接电流控制和间接电流控制两种控制策略为主,直接电流控制主要包括滞环电流控制[2]和双闭环PWM控制,即中间直流侧电压的控制与网侧电流的控制,具体包括:瞬态直接电流控制[3]、d=q电流解耦控制[4]、直接功率控制[5]、预测电流控制[6]等控制策略。由于中间直流侧电压的参考值为直流量,因此为了实现对中间直流侧电压参考值的无静差跟踪,一般将比例积分控制器作为控制系统的电压外环控制器,而网侧电流为交流量,因此比例积分控制器难以实现无静差跟踪,为使单相PWM整流器工作时网侧达到单位功率因数,其电流内环的控制算法显得十分重要。
由于两电平四象限脉冲整流器开关个数有限,从而可以通过有限控制集模型预测控制策略(finite control set model predictive control,FCS-MPC)控制整流器,通过采用遍历法计算出在所有开关状态分别作用下的整流器系统输出值。为了选择合适的开关状态必须定义一个代价函数(评估标准),对要选择变量的预测值进行评估,选择使所设计的系统优化性能函数最小的开关状态![]() 作用于整流器中[7],即:
作用于整流器中[7],即:![]() 。
。
该控制策略的步骤可以归纳为以下步骤:
(1)建立系统模型,给出所有可能开关状态;
(2)定义代价函数g;
(3)建立主电路的数学模型用于预测控制。
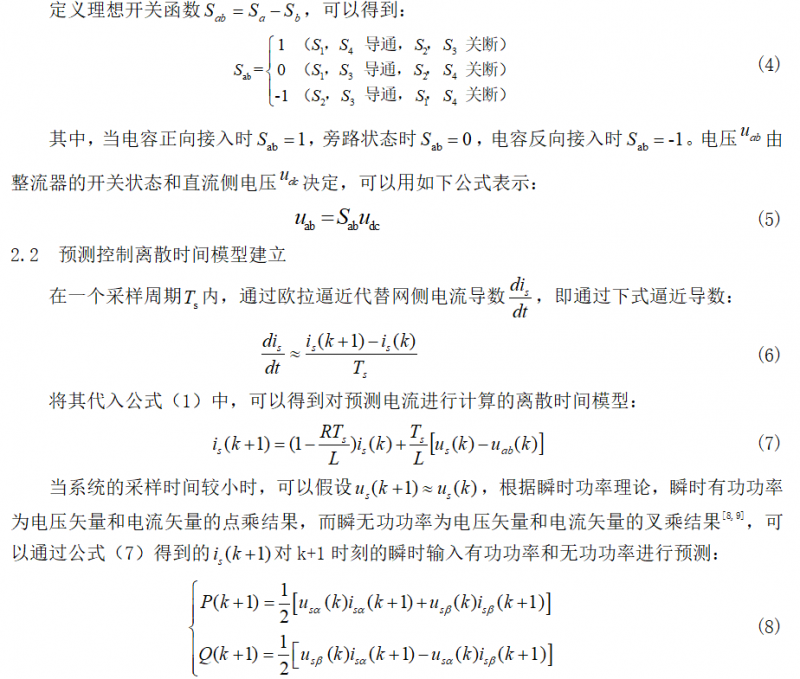
为了计算变量的预测值并加以评估,需要对电路的连续时域模型进行离散化,得到离散时域模型。
本文以两电平四象限脉冲整流器为研究对象,分析了整流器工作原理,采用两种不同的控制方法进行比较分析,通过仿真软件对电路在牵引和再生工况下进行仿真验证。
2 四象限整流器工作原理及模型建立
2.1 整流器工作原理
单相两电平四象限整流器主电路拓扑结构如图1所示。
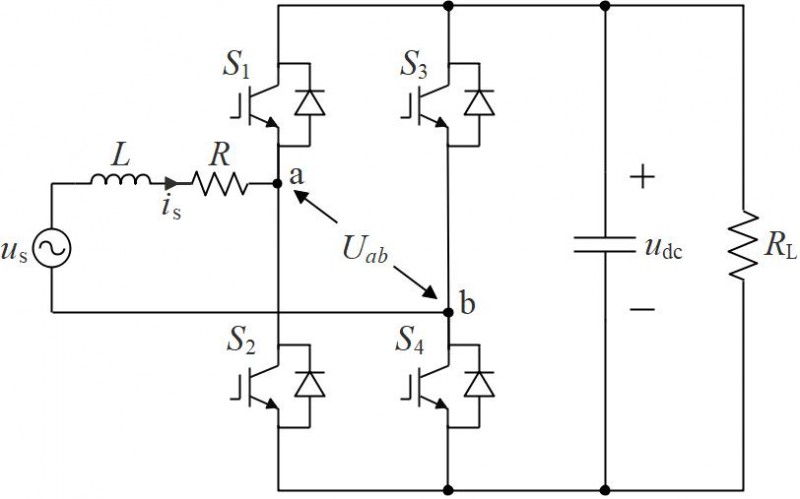
图1 单相两电平四象限整流器主电路
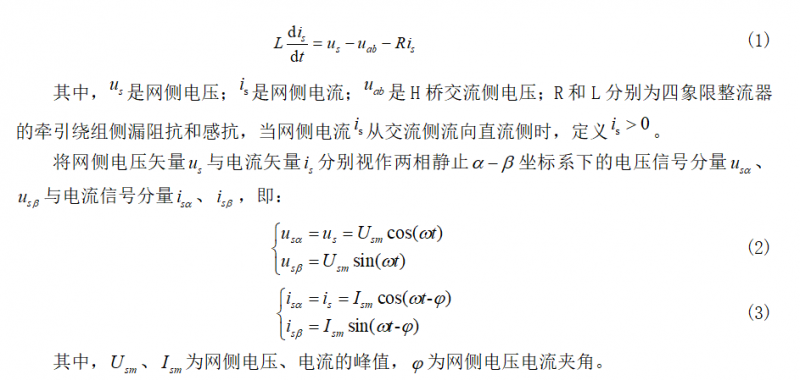
根据基尔霍夫定律,其电压方程可以表示为:
为了使结构更加清晰以及后续主电路建模的需要,对电路进行相应的简化,简化后的结构图如图2所示。
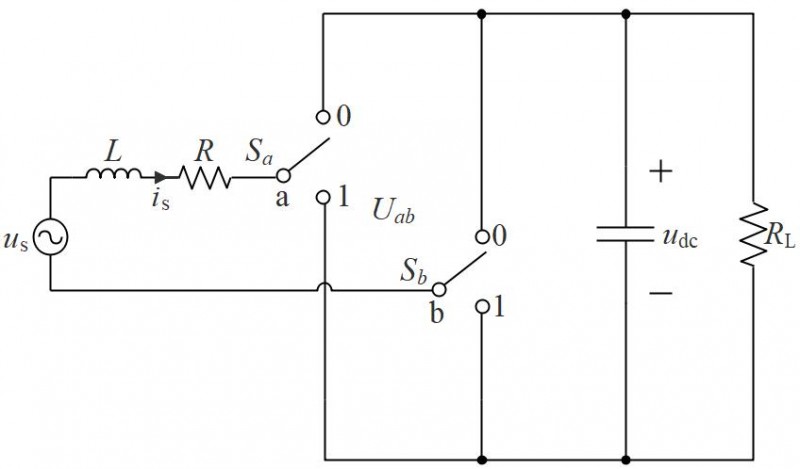
图2 单相两电平整流器开关等效图
3 预测控制实现流程
图3为描述两电平四象限整流器功率预测控制策略的框图。
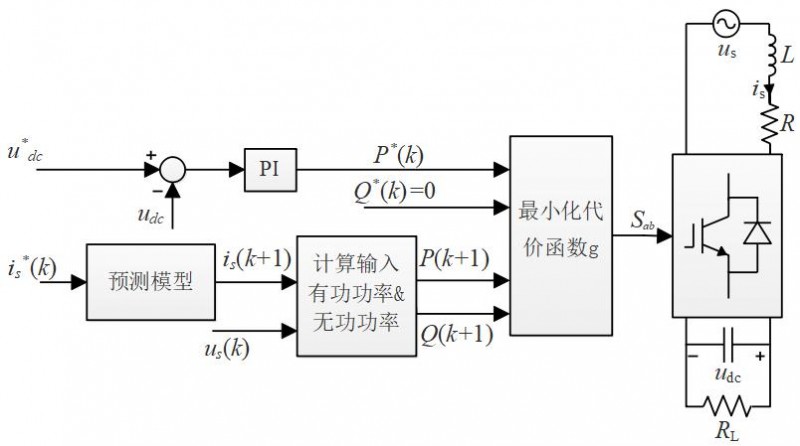
图3 两电平整流器功率预测控制策略
在两电平四象限整流器中,共包括4个可选开关状态,3种不同电压矢量,为了实现开关频率固定,采用求解最小代价函数,得到极值点对应的最优调制函数值![]() 。
。
对于整流器来说,有功功率和无功功率是受控的,因此代价函数g可以用来评估输入功率的误差:代价函数g的值越小,表明采用该开关状态所得到的有功功率与无功功率越接近给定值。对应输出信号![]() 为IGBT的门极驱动信号,与传统PI+SPWM控制策略相比,由于算法直接计算得到输出信号,无需调制过程,可极大程度减少仿真计算时间。
为IGBT的门极驱动信号,与传统PI+SPWM控制策略相比,由于算法直接计算得到输出信号,无需调制过程,可极大程度减少仿真计算时间。
本文中,系统的控制目标是网侧有功功率与无功功率预测值对其参考值的跟踪,在一个控制周期结束时保证系统功率达到跟踪值。为了同时考虑有功功率和无功功率的控制,保证直流侧电压响应与单位功率因数的控制,将函数的权重系数![]() 设置为1,为保证单位功率因数,
设置为1,为保证单位功率因数,![]() ,本文采用的代价函数如下:
,本文采用的代价函数如下:
 (9)
(9)
4 仿真分析
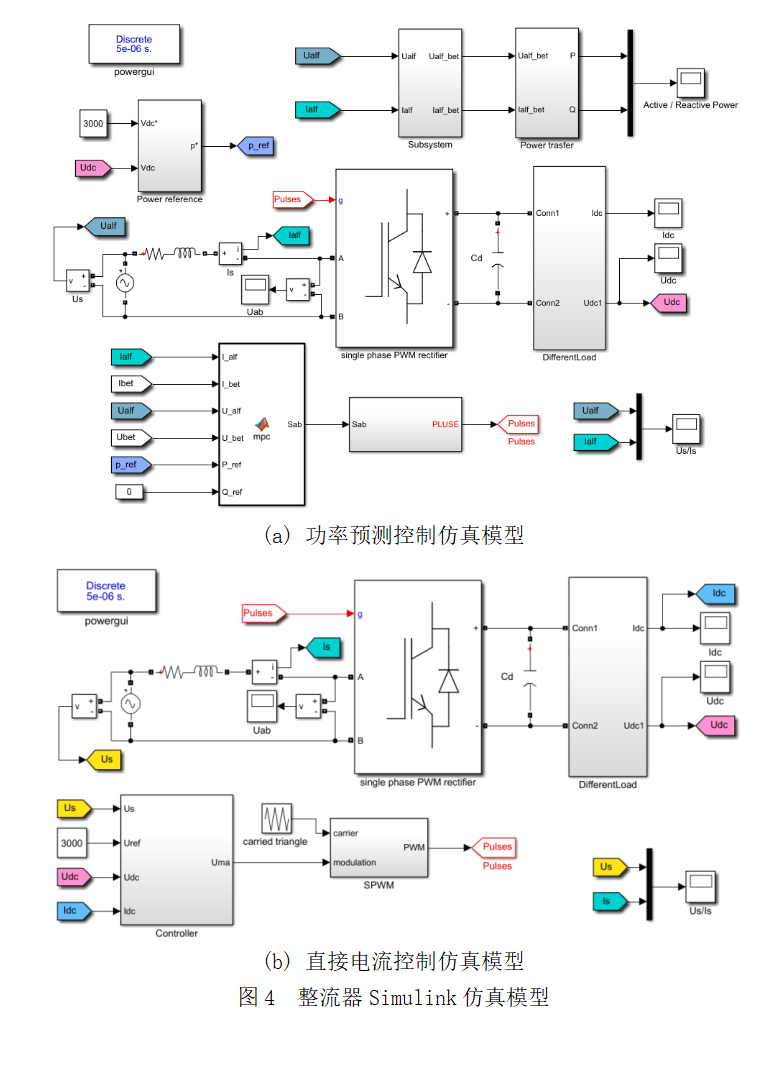
为了验证理论分析的正确性,通过搭建MATLAB/Simulink仿真模型进行测试,针对整流器的功率预测控制和直接电流控制进行了仿真对比。
4.1 仿真模型

四象限整流器Simulink仿真模型如图4所示,包括功率预测控制仿真模型和直接电流控制仿真模型。
4.2 仿真结果
图5(a)和(b)分别给出了功率预测控制和直接电流控制在稳态情况下的网侧电压和电流仿真波形。由该图可知,两种算法都能实现单位功率因数,即网侧电压电流的同相位。

图6(a)和(b)分别给出了两种控制策略在稳态情况下对网侧电流进行FFT分析的结果。从图中可以看出,采用功率预测控制算法,可以获得较低的网侧电流谐波总失真数(THD)。
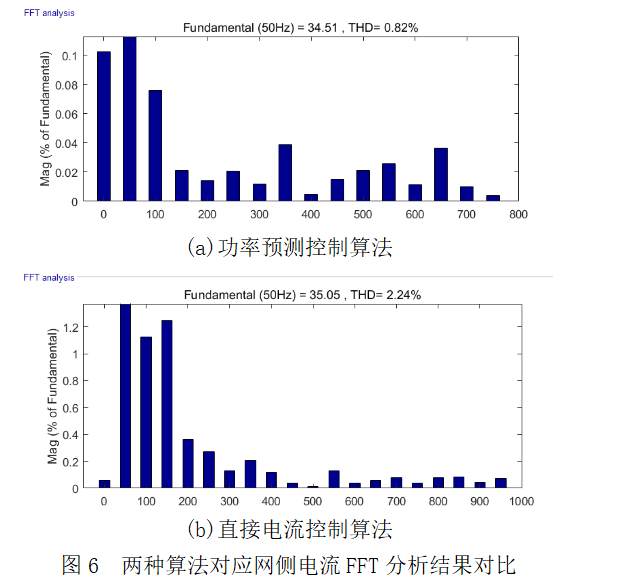

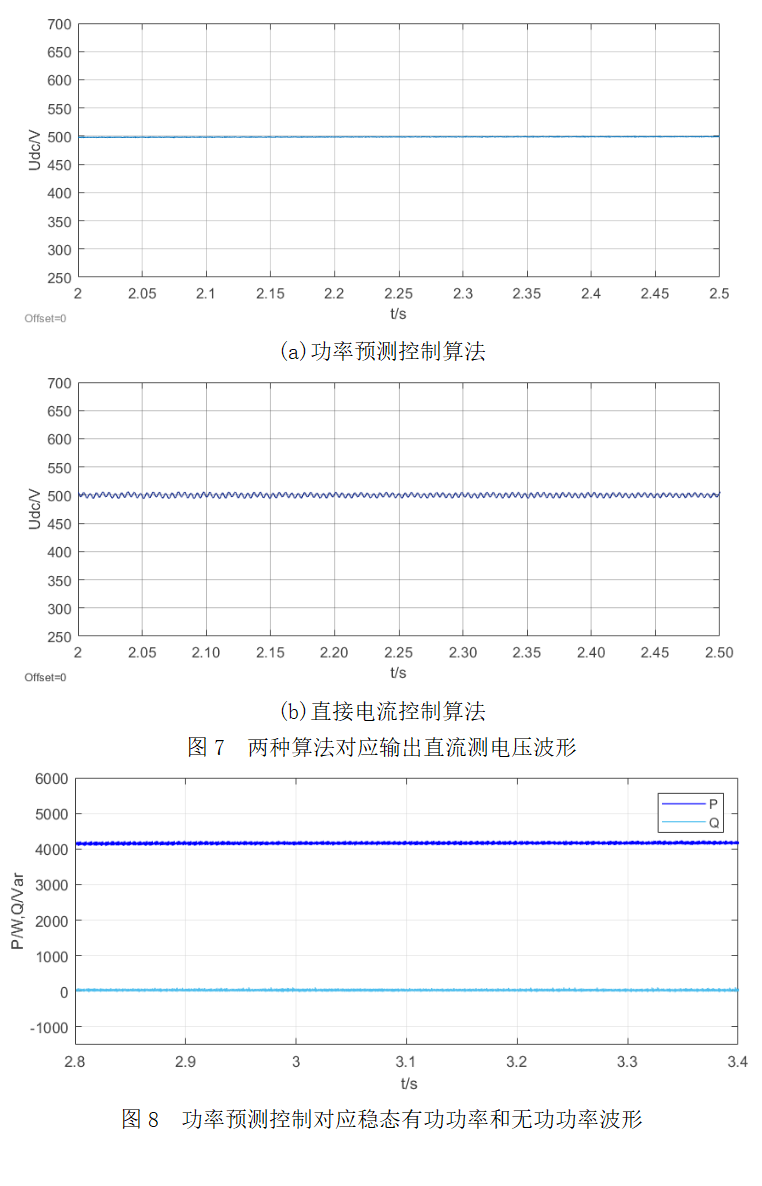
图8给出了功率预测控制策略在输出电压达到幅值后的有功功率和无功功率,实际功率可以准确的跟踪其参考功率,该算法对应的有功功率波动约为45W,波动较小,可以保证控制精度。
5 总结
本文针对单相两电平四象限整流器预测功率控制策略和经典直接电流控制策略进行仿真研究。结果表明,预测功率控制策略实现简单有效,充分考虑到功率器件的离散性,无需任何类型的电流控制器或调制器即可产生单位功率因数的正弦输入电流,同时实现了直接控制输入功率的快速动态响应,当进行负载切换时,该系统具有良好的鲁棒性。这种控制策略非常有利地利用了功率转换器和微处理器的离散特性,随着DSP的计算能力越来越高,对于所有可能的开关状态、工作状态,预测变量所需的计算量可以通过DSP快速且无问题地执行。因此,预测控制是电力电子控制领域中非常有前途的选择之一。
参考文献:
[1]宋文胜,冯晓云. 电力牵引交流传动控制与调制技术[M]. 北京:科学出版社, 2014.
[2]Dahono P A. New hysteresis current controller for single-phase full bridge inverters[J]. IET Power Electronics. 2009. 2(5): 585-594.
[3]宋文胜,冯晓云. 基于零序电压分量注入的单相三电平NPC整流器脉宽调制方法[J]. 中国电机工程学报, 2011, 31(36): 16-24.
[4]刘秉,宋文胜. 基于虚拟信号反馈算法的单相PWM整流器DQ电流解耦控制[J]. 中国电机工程学报,2018,38(15):4504-4513+4651.
[5]张辉,李志新,王涛,张满,孙传达. 基于三矢量的三相PWM整流器低复杂性模型预测直接功率控制[J]. 电网技术,2018,42(03):957-965.
[6]陈柏宇,武丽. 基于预测电流控制的双极性PWM整流器控制算法研究[J]. 工业控制计算机,2016,29(01):153-154+160.
[7]陈一民,等,译.(智)罗德里格斯,(智)科特斯. 功率变换器和电气传动的预测控制[M]. 北京:机械工业出版社,2014.12.
[8]邓知先. 单相PWM整流器模型预测直接功率控制算法[D]. 西南交通大学,2016.
[9] P. CortÉs, J. RodrÍguez, P. Antoniewicz and M. Kazmierkowski. Direct Power Control of an AFE Using Predictive Control[J]. IEEE Transactions on Power Electronics, vol. 23, no. 5, pp. 2516-2523, Sept. 2008.
作者简介:
李景媛(1992-),女,硕士研究生,大连交通大学,研究方向为电机驱动及其控制,Email:conan5416@163.com
王英(1962-),男,教授,大连交通大学硕士研究生导师,主要研究方向为电机及其驱动控制
康雪峰(1992-),男,硕士研究生,大连交通大学,研究方向为电机驱动及其控制,Email:815817680@qq.com




共0条 [查看全部] 网友评论