
关键词:永磁同步电机;电流源;模型参考自适应;切换
Abstract: For the disadvantage in the model reference adaptive sensorless vector control method of permanent magnet synchronous motor (PMSM) is not suitable for low speed, a control method of current source and model reference adaptive sensorless vector control switching for PMSM is proposed. The test results show that the method has higher starting torque at low speed and better stability at high speed, and can be used in general industrial applications.
Key words: PMSM; Current Source; MRAS; Switching
1 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有功率密度高、损耗小、动态响应快等优点,已广泛应用于数控机床、航空航天等领域。无速度传感器的矢量控制技术有利于改善永磁同步电机驱动系统的可靠性,简化系统结构,具有重要的研究意义[1]。今年来,国内外学者对PMSM的无速度传感器控制技术进行了较深入的研究,现有成果按照其适用的电机转速范围分为两种:适用于低速的方法和适用于中高速的方法。其中模型参考自适应法(Model Reference Adaptive System)是适用于中高速的一种无感矢量控制方法,由于低速时该方法的转速估计器无法观测出准确的磁极位置,因此在低速时输出力矩无法达到满意的控制效果,甚至电机都不能正常启动[2]。
本文提出了一种电流源与MRAS无感矢量切换的启动控制方法,低频时采用电流源控制,启动过程电流没有过冲,输出力矩与给定的电流大小成正比。中高速阶段平滑切换至模型参考自适应矢量控制,满足电机在全频段的稳定运行。
2 电流源与模型参考自适应无感矢量切换的控制方法
2.1 总体控制框架
电流源与模型参考自适应无感矢量切换的总体控制框架如图1所示。在电机启动阶段,开关S1、S2均掷于2处,控制系统工作在电流源模式,相当于转速环不参与控制,只有电流环参与。电流源工作模式下,“转矩电流”和“励磁电流”并不是常规意义上以转子磁链定向坐标系下的转矩电流和励磁电流,但为了方便起见,仍然称为“转矩电流”和“励磁电流”。一般地,电流源模式下,“励磁电流”参考值id_ref给定为零即可,“转矩电流”参考值iq*给定为电机额定电流(若电机允许过载,也可以给定额定电流以上,越大越有利于保证输出力矩)。转速ωe由外部给定的频率大小决定,ωe积分得到系统的角度。
当频率上升至控制系统内部预设的切换频率点时,开关S1、S2均切换至1处,控制系统切换为基于模型参考自适应的转速外环、电流内环的双闭环控制。切换后,估计器输出的转速信号作为转速环的反馈值,估计器输出的角度作为系统的控制角度,转矩电流给定切换为转速外环PI调节器的输出,相当于转速环、电流环均参与到系统的控制。
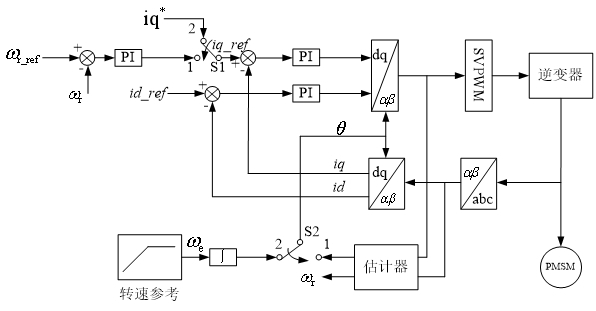
图1 电流源与MRAS无感矢量切换控制框图
2.2 模型参考自适应无感矢量控制
一个模型参考自适应系统如图2所示,应包含着两种模型,分别为参考模型和可调模型,这两个模型有着相同物理意义的输出量,不同的是参考模型不含待估参数,而可调模型含有对应的待估参数。其基本思想为:参考模型与可调模型的输出和状态性能指标通过反馈比较器得到误差方程,构造合适的自适应律,使得可调模型的控制对象能够跟随参考模型的动态响应,从而实现自适应实时调节。通过模型参考自适应估计器估算出转子位置和速度[3]。
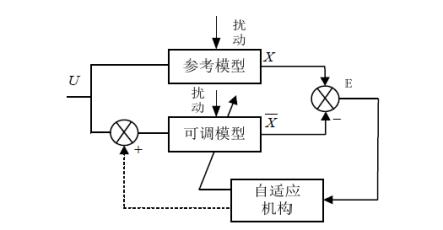
图2 模型参考自适应框图
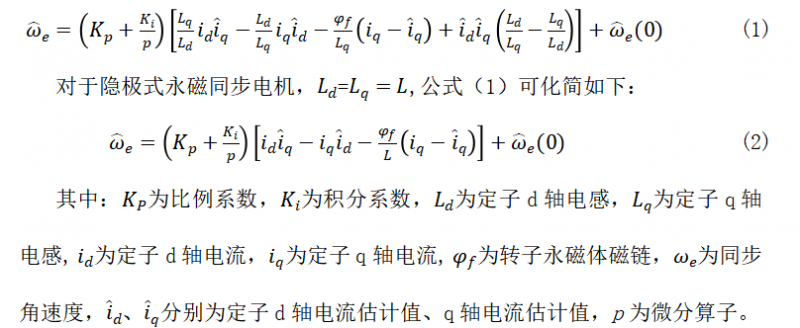
根据永磁同步电机的数学模型和Popov超稳定性定理[4],可以推导出永磁同步电机模型参考自适应矢量控制的转速自适应率如公式(1)所示。
2.3 切换方法
整个控制方法的关键点在于电流源向模型参考自适应无感矢量控制的切换,切换过程必须保证平滑过渡,才不会引起电机转矩和电流的突变[5]。因此切换控制的基本思想,保证输出电压的幅值和角度不会发生突变。本文提出的切换控制方法总结采取了以下几条细节处理。
由电流源向无感矢量切换时:
(1) 对用估计器角度变换得到的q轴电流进行一阶低通滤波,并作为转速外环的积分初值。
(2) 由估计器角度变换得到的d轴、q轴电压作为电流环PI调节器的积分初值。
(3) 切换时,q轴先切换,d轴延时后再渐变至设定值。
由无感矢量向电流源切换:
当前实际使用的q轴电流给定值作为电流源的q轴电流给定初值,然后再渐变至设定值。
3 试验情况
针对本文提出的电流源与模型参考自适应的无感矢量切换的控制方法进行了实验验证。实验设备为济南某空压机厂制造的永磁同步变频空压机,成套设备如图3所示。驱动电机采用的是三相稀土永磁同步电动机,其铭牌参数如图4所示。

图3 空压机成套设备
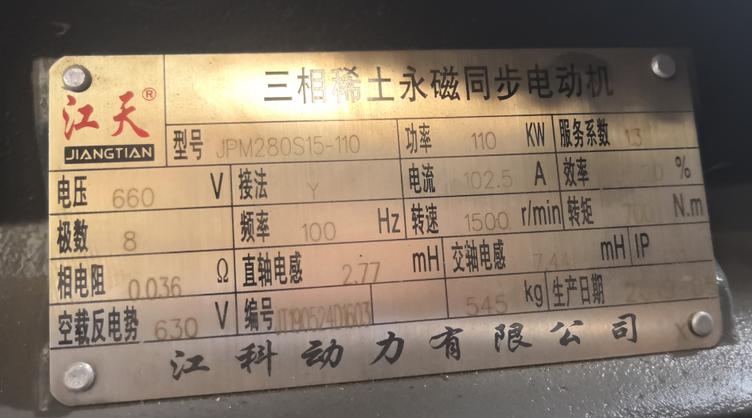
图4 永磁同步电机铭牌参数
电机额定电压660V,额定功率110kW,额定频率100Hz,额定转速1500r/min,极数为8极,定子电阻0.036欧,d轴电感2.77mH,q轴电感7.44mH,空载反电势630V。
新风光FG2100系列低压变频器针对永磁同步电机采用了本文提出的电流源与模型参考自适应无感矢量切换的控制方法,在空压机设备上分别进行了启动试验和额定带载试验。
试验时电流源向无感矢量切换频率设置为8Hz,电流源模式的q轴电流给定为100%电机额定电流。电机带载启动试验电流波形如图5所示,由电流波形看出,切换瞬间电流非常平滑,没有任何冲击。运行在额定频率100Hz,负载加至1.3倍的电机额定负载,系统运行正常,电流波形如图6所示。
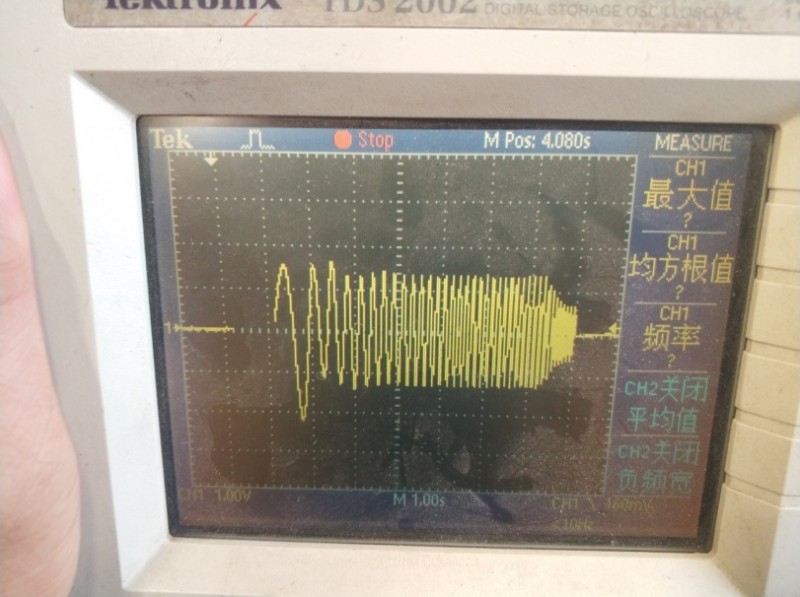
图5 启动电流波形

图6 100Hz 1.3倍过载电流波形
4 结论
本文以矢量控制技术为基础,提出了一种永磁同步电机电流源与模型参考自适应切换的控制方法,该方法采用电流源模式启动,中高速切换到模型参考自适应的矢量控制。在永磁同步电机驱动的空压机负载上进行了试验验证,结果表明本文提出的方法具有较高的低速启动力矩和较好的高速带载稳定性,模式切换平滑无冲击,能满足一般的工业应用场合。
参考文献:
[1] 王萌, 杨家强, 张翔,等. 一种表贴式永磁同步电机电流矢量闭环I/f控制方法[J]. 中国电机工程学报, 2015, 35(10):2513-2521.
[2] 张乘玮, 沈汉林, 唐其鹏,等. 一种高效的PMSM无位置传感器I/f控制方法[J]. 微特电机, 2017(10):48-52.
[3] 王子辉, 叶云岳. 反电势算法的永磁同步电机无位置传感器自启动过程[J]. 电机与控制学报, 2011, 15(10):36-42.
[4] 李冉. 永磁同步电机无位置传感器运行控制技术研究[D]. 杭州: 浙江大学, 2012.
[5] 朱万平, 孙耀程, 胡勤丰,等. 永磁同步电机无传感器单电流环启动及闭环切换研究[J]. 机电工程, 2015, 32(1):74-77.
作者简介:
丁宁(1988-),山东兖州人,硕士研究生,中级工程师,供职于新风光电子科技股份有限公司,Email:dingning_889@126.com,Tel:18254742996。
曹广芹(1981-),本科学历,中级工程师,供职于新风光电子科技股份有限公司。
郭少明(1981-),本科学历,中级工程师,供职于新风光电子科技股份有限公司。
高栋(1986-),硕士研究生,中级工程师,供职于新风光电子科技股份有限公司。




共0条 [查看全部] 网友评论