
关键词:水体监测采样;水面无人艇;远程物联网;自主供电
Abstract: Autonomous control system with mobile water quality monitoring, sampling and oxygenation is designed, which adopts aeration pump, photovoltaic power supply and remote Internet of things monitoring technology. It can realize the mobile monitoring of pH, dissolved oxygen, turbidity, conductivity and temperature of water bodies in different depths near the surface of monitoring waters. It can be installed on a small unmanned boat monitoring platform, combined with GPS positioning and self-control functions. By setting a series of monitoring points on the configuration software of the upper computer or the app map of the mobile phone, the functions of independent energy supply, automatic cruise monitoring, quantitative water sample collection and automatic start stop aeration can be realized. 4G DTU is used to realize the network monitoring of multiple mobile monitoring platforms, and the multi terminal support function of upper computer configuration software is used to realize the monitoring task scheduling and monitoring of multiple mobile monitoring platforms, realize the water quality monitoring of a large range of water, water sample collection, aeration and oxygenation, and can be applied to the water quality monitoring of a large range of water, aquaculture and other technical fields.
Key words: Water monitoring and sampling; Surface unmanned boat; Remote Internet of things; Independent power supply
1 引言
水质在线监测系统可以对水质进行全天候监测,水质监测系统所获得的数据能够真实的反映出水体质量和污染变化趋势,为水质环境管理提供可靠的数据依据。目前市场上的水质监测设备,多采用岸边台站监测或水面定点平台监测,不具备移动监测能力,功能较为单一,或者采用遥控无人艇搭载传感器式的监测方式,其仅仅具有水体表面监测功能,不具有自动增氧和定深水体采样功能,且不具有自主控制能力。水体增氧装置也多采用定点射流方式,对水体扰动较大,而且建造与运行难度较大。单台监测、采样和曝气设备无法在短时间内完成对大范围水域的监测和水样采集工作,亟需一种高效的可用于组网监测的水面移动平台的水体监测、采样与增氧的控制系统。为此,我们设计一种自主供电的水面移动监测与增氧控制系统,可根据用户设定的监测点进行自主巡航监测,实现对监测点水体温度、pH值、浊度、含氧量、电导率参数的实时监测和水样的采集,并可根据监测的溶解氧数值,判断水体的含氧量,如果含氧量较低,自动开启曝气增氧机构,对水体增氧。该控制系统包括光伏模块、远程通讯与监测控制模块、水质监测传感器模块、曝气模块、水样采集模块。该系统自主运行控制,通过对水中溶解氧数值的检测,并与设定的溶解氧的最低值进行比较,实现系统自控。
2 控制系统组成
该自主供电的水面移动监测与增氧控制系统分割成两个主要的子系统,包括系统供电子系统、数据通讯与监测控制子系统。
2.1 自主供电系统设计
利用光伏供电与蓄电池储能技术,实现控制系统的自主发电、储电、供电,减少了普通曝气设备的线缆及相关辅助设施的投入和维护,充分适应水面移动监测的特殊性,降低曝气增氧的运行费用和维护难度。系统供电子系统采用100Ah、24VDC免维护磷酸铁锂蓄电池组,结合250W的单晶太阳能电池板和充放电控制器对蓄电池进行充放电控制,曝气泵的功率为800W,曝气累计时间为2小时,所需电量为1600Wh,考虑到逆变器的转换效率为80%,则曝气泵2小时所需电量为2000Wh。溶解氧、浊度、pH、电导率传感器和PLC模块的功率分别为2W,工作时间为4小时,则消耗的电量为40Wh,数据传输模块DTU模块功率为1W,GPS功率为3W,工作时间为4小时,则消耗功率为16Wh;采样泵、电磁阀和电动推杆为间歇式工作,其耗电量可以忽略。所以控制系统消耗的电量为2100Wh以下,不超过蓄电池组2400Wh的电量,满足连续4个小时正常工作的系统供电。通过4kW电源逆变器实现220VAC电源输出,满足曝气泵的供电要求,通过直流电源转换和稳压模块实现对需要12VDC供电的DTU通信设备、水质传感器和24V DC供电的PLC、电磁阀、采样泵、电动推杆的供电,如图1所示。
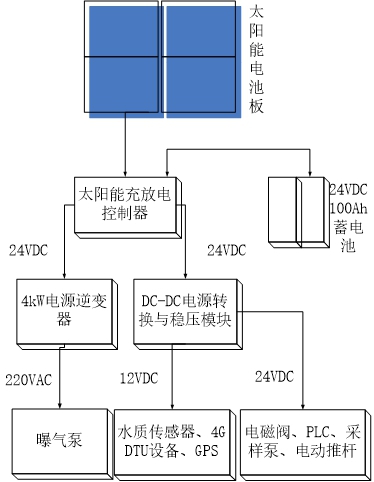
图1 自主供电系统组成
2.2 数据通讯与监测控制系统设计
数据通讯与监测控制系统由上位机和下位机组成,如图2所示。下位机由台达PLC及模拟量扩展模块、中间继电器、曝气装置、水质采样设备和MPS-400水质传感器单元组成,完成溶解氧、浊度、温度、pH、电导水质传感器的实时数据采集和上传。上位机可采用电脑,也可是手机。采用电脑作为上位机,则安装其上的软件主要由台达组态软件、上位机数据库SQLServer2005和巨控提供的OPC服务器组成,通过实时的组态画面显示,用户可以掌握曝气泵、推杆、传感器的运行状态是否正常,完成数据的显示以及曝气泵、电动推杆的启停操作,实现对溶解氧的实时监控和异常值报警以及pH值、浊度等信息的显示,溶解氧的报警阈值和曝气时间均可以在上位机进行更改设置。上位和下位机之间通过巨控科技的GRM DTU203G数据传输模块进行通信。同样可以采用手机APP访问云端服务器的方式进行远程监控。系统采集的数据可以同时保存在上位机数据库和云端服务器,并且实现二者的同步控制和显示。由于采用了4G物联网模式,该系统可以实现多个下位机终端的组网监控功能,在一个上位机上实现对多个移动监测平台信息的综合监控和监测任务调度,这样多个移动监测平台同时并行工作,从而实现在较短的时间内完成对大范围水域的监测、采样和曝气。
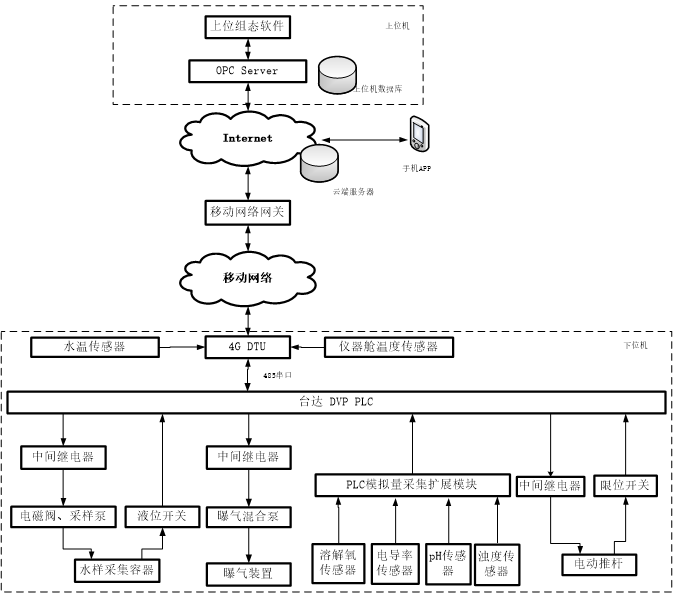
图2 控制系统组成
数据通讯与监测控制子系统的功能包括:
(1)传感器数据采集与增氧装置自动启停控制
水质传感器组件和采样柔性吸水管固定在一个支撑杆上,系统程序通过PLC控制电动推杆的伸缩,通过连杆方式带动安装在支撑杆上传感器的入水下放,通过限位开关实现推杆位置的反馈,实现传感器下放深度的控制。通过PLC的模拟量扩展模块采集传感器的4-20mA模拟输出信号,经过采集数据转换,映射为工程值,并通过4G DTU传送数据到上位机控制中心,接收上位机的控制指令,通过PLC控制气液混合泵的启停。系统管理人员可以简单直观地浏览各个监测点的实时监测数据、各个监测点的曝气装置的工作状态。
(2)预防数据丢失的软件数据软件
控制系统采集的原始数据同时保存在上位机数据库和云端服务器。用户通过电脑在组态软件中读取数据或手机利用Internet网络读取云端数据,两种方式的数据是同步的,这样同时存储的方式可以起到数据备份和预防数据丢失的作用。
(3)实时数据与历史数据的存储、查询与呈现
组态软件和手机APP软件能同时显不同移动监测平台的传感器数据和系统电压,每个移动平台的数据根据DTU号码的不同,以列表方式或者数据曲线进行独立显示。软件提供历史数据查询功能,用户可以查询不同时间段、时间点的数据,也可以实现各个移动监测平台的历史数据的查看,通过数据曲线图的方式显示传感器数据和系统电压的变化,直观简便,曲线可以进行缩放,可以根据用户不同的选择时间段,如小时、天、月,进行不同粒度的数据曲线呈现。
(4)超限报警功能
当被测溶解氧数值低于预设的溶解氧低值的值时候,组态软件界面会自动跳出报警界面,同时向用户发送手机短消息。报警信息包括GPS坐标、溶解氧数值,提示用户当前监测点的水质溶解氧参数已达到最低值报警的条件,下位机控制系统启动自动曝气功能,进行曝气增氧。系统还有电压异常报警功能,当蓄电池电压高于预设的最高值或者低于预设的最低值的时候,向用户发送手机报警短消息,提示系统工作电压不正常,提醒用户及时处理。
(5)水质自动定量采样功能
采样装置设置有4个采样容器,编号为No.1~No4,采样容器上设有防尘通气孔,并安装有高度可调的常开的液位开关,用以不同容量水样的采集,最大容量为500mL。吸水管与采样容器之间安装有常闭的电磁阀和多通的管阀,程序通过控制对应编号采样容器的电磁阀的通断,实现对不同的监测目标点的水体采样。
3 系统实施
3.1 系统操作流程
首先,上位机用户在电子地图上选定需要监测的目标点,以及需要水样采集的目标点。用户可设定1-4个监测目标点(包括起始点,这样起始点是最后一个目标点),监测完毕后,回到起始位置。上位机控制系统计算出以当前位置为原点,东向为X轴,北向为Y轴坐标系下目标点的位置坐标和航向信息,并将该坐标信息和航向信息下发到下位机控制系统中,作为移动平台的监测目标的预定点和预定的航向角。下位机控制台达PLC系统采集移动平台的实时GPS数据和航向角信息,与设定的监测点的位置数据进行对比,通过比较监测点的设定位置值与实时位置值,考虑到GPS的定位误差,如果移动平台的实时位置落在以设定监测点为圆心,5米为半径的圆内,则认为到达了预定的监测目标点。到达目标点后,移动检测平台进行定点悬停,控制系统程序启动电动推杆,将柔性吸管和传感器下放到预定深度,到达指定深度后,启动水质监测,传感器持续监测5分钟,并将监测数据通过DTU发送到云端,用户可通过手机APP和上位机监控软件进行数据查看。水质监测完成后,根据用户的预先设定是否启动水质采样,如果需要水质采样,则打开采样泵和对应的电磁阀,实现对监测点水质的采样,台达PLC通过液位开关检测采集容器内的液面高度,液位开关采用常开设置,当到达设置的液面高度时,程序自动停止采样泵工作,采样泵断电则处于闭合状态,以此实现自动定量采集。采样到定量的水样后,程序自动控制电动推杆进行收缩操作,通过限位开关控制伸缩杆的回复位置,将支撑杆拉回到水面预定位置,水体采样结束。采样容器的最大容量为500mL,采样泵的流量为100mL/分,这样整个水样采集耗时最大约为5分钟。水样采集结束后,根据5分钟内水质的欸平均溶解氧含量情况,是否需要启动曝气增氧装置,如果需要曝气,则打开增氧装置,累计时间30分钟;不需要曝气增氧,则水样采集完毕后,系统控制移动平台自动驶向下一个预定的目标点;如果最后一个目标点为起始点,则系统在运行完毕上述流程后自动停止,等待用户的下一步操控命令。下位控制箱如图4所示,台达控制程序如图5所示。

图3 水质监测、采样和曝气增氧系统的控制方法
图4 下位机控制箱
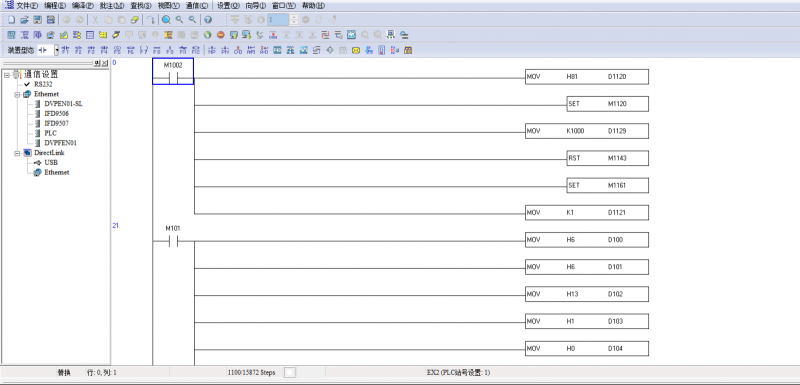
图5 台达PLC控制程序
3.2 溶解氧的控制
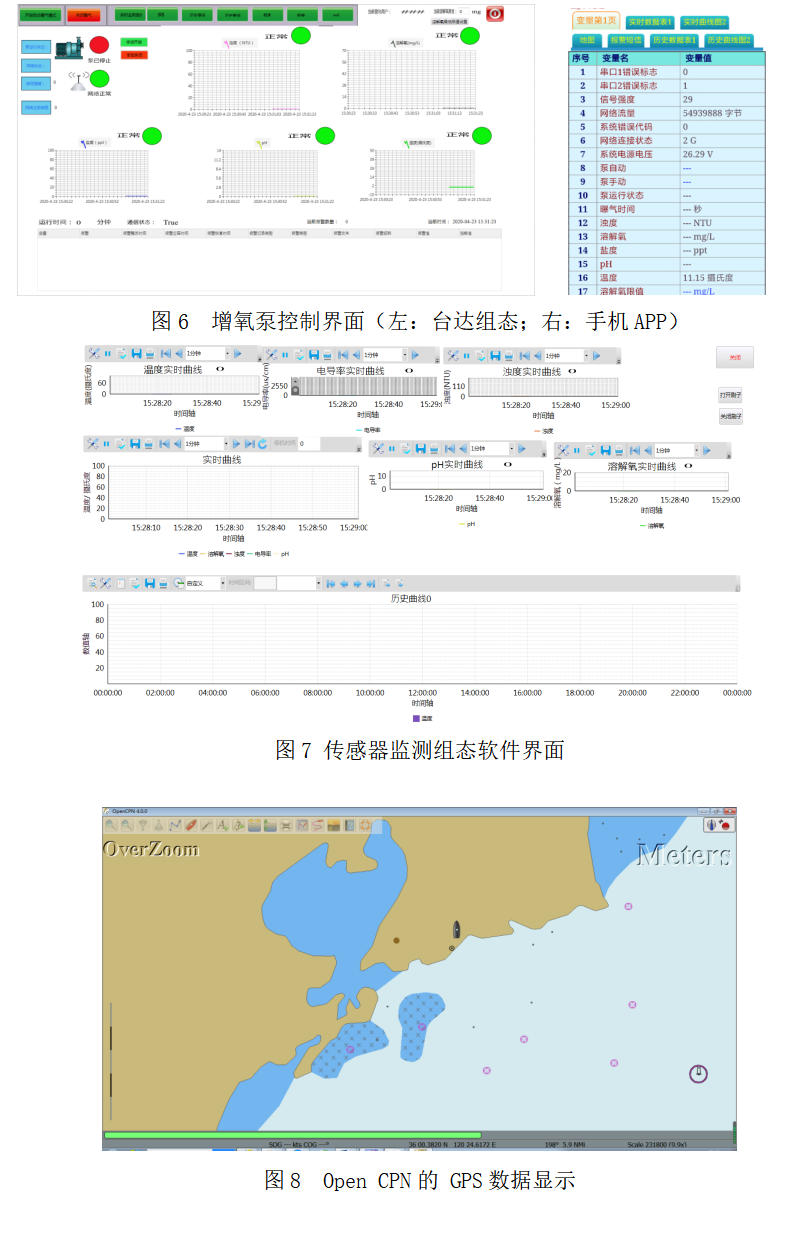
溶解氧的最低值可根据水体的实际情况进行设置,如图6所示,系统默认溶解氧最低值为5mg/L。增氧设备的启停依据5分钟内传感器检测的溶解氧的平均值,当溶解氧平均值低于5mg/L时,增氧设备自动开启并自动运行,当检测到溶解氧高于5.5mg/L时停机,当溶解氧再次低于5mg/L时,重新开启,循环往复,直至时间累计30分钟止。由此保持水体中溶解氧始终不低于5mg/L,强制提高水体自净能力。溶解氧最低值和自动曝气时间均可以在触屏或者远程终端进行设置,其中溶解氧最低值最小可设置为4mg/L,最低值最大可设置为6mg/L,而且曝气泵停机时的溶解氧值要比最低值高0.5mg/L,可以防止曝气装置的频繁启停,节省电量;最大曝气时间为30分钟,最小曝气时间为10分钟。通过4G物联网技术,实现对多个监测平台的远程互联和监控,通过电脑组态软件或手机客户端APP,实现对增氧设备的远程启停、自动水样采集、系统故障报警等功能,为用户提供准确的数据,无需人员现场查看,保证了数据的实时性、提高了工作效率,如图7所示。通过4G物联网的定位功能,结合GPS和电子地图,可以准确定位某个移动监测平台的实时位置,如图8所示,便于对区域、流域内的多个移动监测平台进行统筹监控与管理,便于用户的水质监管工作。
参考文献:
[1] 戴玄吏, 汤佳峰, 章霖之. “湖泛”恶臭物质分析及来源浅析[J]. 环境监控与预警, 2010,2(3): 39-41
[2] 张万松, 缪旭波, 朱风松, 等. 水污染源在线监测系统常见问题及核查方法研究[J]. 环境监控与预警, 2012, 4(2): 22-26
[3] 黄国良, 徐恒, 熊波, 等. 内河无人航道测量船系统设计[J]. 水运工程, 2016, 41(1): 162-168
[4] 罗刚, 张然. 无人监测船在城市内河水质监测中的应用[J]. 环境监控与预警, 2017, 9(7): 18-20,31
[5] 金久才, 张杰, 邵峰, 等. 一种海洋环境监测无人船系统及其海洋应用[J]. 海岸工程, 2015, 34(3): 87-92




共0条 [查看全部] 网友评论