



关键词:机器人;单片机控制系统;设计;实现
Abstract: Robots can assist or replace humans in various tasks, especially those that are dangerous, heavy, and boring. This article explores the design and implementation of the robot microcontroller control system. First, it introduces the current intelligent robot, including its functions and applications, and then discusses the design of the robot microcontroller control system and its application prospects.
Keywords: Robots; SCM control system; Design; Achieve
1 引言
机器人是自动执行工作的机器装置,主要由机械身体、记忆或程序功能和核心零件等组成。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。当今时代机器人已经被广泛利用于制造业领域,对制造业的发展起了重要的推动作用。随着智能计算机技术发展,越来越多的机器人进入了人们的日常生活中,如家庭清扫机器人、娱乐机器人、服务机器人等,为人们的日常生活,出行工作都带来了极大的便利。单片机是自动化技术的重要部分,在许多领域都有着广泛的应用价值,这也是机器人控制系统的重要技术。单片机控制系统的合理设计能够使机器人发挥出最好的性能水平[1]。因此对机器人单片机控制系统的单就具有非常实际的意义,不仅是推进机器人技术的发展的需要,也是为机器人更好的应用前景打下基础。
2 单片机控制系统
单片机在生活中应用广泛,有着功能强大、性能稳定的优点,在运行过程中可靠性较好。随着我国科技发展,单片机逐渐向高度集约化方向发展,取得了良好的效果。单片机系统重,最主要的是CPU[2],它能够发挥全局指导作用。随着系统升级,单片机系统能够提高运行的效率。在进行单片机机系统设计中,不仅要设计整体的运行方案,同时还需要进行单片机的合理选择。在这样的基础上,还需要进行检测参数的建模,阶段性的设计部署工作。在设计过程中要做到实事求是,综合利弊,对不同的情况进行灵活应变。进行单片机系统设计之前,需要了解控制对象,并考虑实际运行中可能出现的差异。设计方案多样,需要根据实际需求进行选择,但需要满足有开环系统和闭环系统。检测原件的作用也非常重要,对整个系统的精确度有着很大影响[3]。
3 机器人单片机控制系统设计
智能机器人是通过计算机、单片机及传感器等多项技术研制出来的机器人,相对于传统的机器人而言,其智能化水平更高,能够对外界的信息进行数据收集,从而实施对机械手等部位的控制,达到独立活动和工作。智能机器人有两种主要的功能,首先是语音功能,就是在工作活动中能够通过语音对当前任务的进程进行语音的提示;然后是显示功能,根据语音的提示能够显示出对应的文字。比如机器人进行某项活动时,会响起对应的提示音,而后会显示当前任务是什么。基于单片机的机器人控制系统结构图如图1所示。
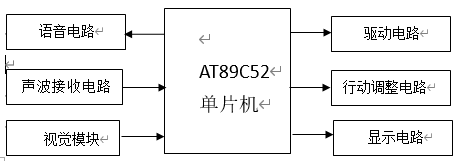
图1 单片机控制系统结构图
驱动模块是智能机器人中最主要的模块,关系着机器人正常的行走功能。在进行设计时,需要选择合理的三极管对单片机的I/O接口电流放大[4],从而提供给驱动器足够的电流,保证电动机的运行,这样的设计不仅能够使电动机获得较大电流,维持推动能力,还不会对其他模块产生不良影响。
3.2 显示电路设计
智能机器人的显示模块设计选用当前阶段最为常见也是综合性能最好的LCM4602液晶显示屏[5],这种显示屏使用便捷,需求的成本也不高。
3.3 语言电路设计
机器人在运行过程中偶尔会出现失误,为了减少这种情况需要采用语音提示。在进行语言模块的设计时,采用ISD25120语音芯片,这一芯片有着高保真特点,使机器人在长时间的运行中不会出现声音失真的情况。此外它还具有录放时间长的特点,能够同时处理大量的声音信息。
3.4 视觉电路设计
在使用过程中,只要发布命令后,机器人就能够自主进行目标的发现和跟踪,从而开始进行工作。在进行视觉模块的设计中,需要安装红外线发射传感装置,通过传感装置来判断目标的存在。在传感装置内部有两条管线,一条是发射管线,在机器人得到命令后便会通过发射管线射出红外线,在接触到目标后红外线便会反射回来;另一条是接受管线,红外线反射回来后,接受管线就会进行接收,从而确定目标。如果前方不存在目标,发射管线所发射的红外线不会被反射,因而接受管线也不会接收到反馈信息。
3.5 行动调整电路设计
行动调整模块的作用是对机器人的行动进行修正调整。在运行过程中,机器人的运动会受到各方面的干扰,如环境干扰、电机转动差异等,因此需要进行行动调整模块的设计。设计过程中,采用两个光耦安装于机器人的腿部,机器人在行动过程中光耦会规则性地交替更换;当行动收到影响变得不正常时,光耦会出现不过则的变换,因而机器人会停止其中一条腿的运动,等另一条腿到达相应位置后,光耦又会重回规律状态,就这样对行动进行了修正和调整。
3.6 声波接收线路设计
机器人存在超声波接受模块,能够使其拥有听觉功能。当外界环境出现亚超声时,机器人会自动做出相应的动作,如行走、停止等。在进行声波接受线路设计时,采用成品声波接收板,通过转换输出信号来控制。
3.7 运动控制系统
运动控制系统是对机器人运动部位的速度、位置进行实施控制管理的系统,使其能够按照预定的运动轨迹及运动参数进行运动。运动控制在传统机械数控行业应用广泛,在电子制造及信息产品制造业中也起重要作用。运动控制技术如今已发展成为高度集成化技术,与应用系统的工艺与技术密切相关。行业的技术工艺发展同时推动着运动控制技术的发展。运动控制器具有信息处理能力强,开放程度高、通用性强等特点,能够提高其使用精度,顺应市场需求。相对于传统数控装置,其技术更加新颖,功能更强大;结构呈模块化,可以建立不同的组合,形成相应功能需求的控制系统;操作方便,能够通过简单编程实现运动控制功能[6]。基于单片机的机器人控制系统图如图2所示。
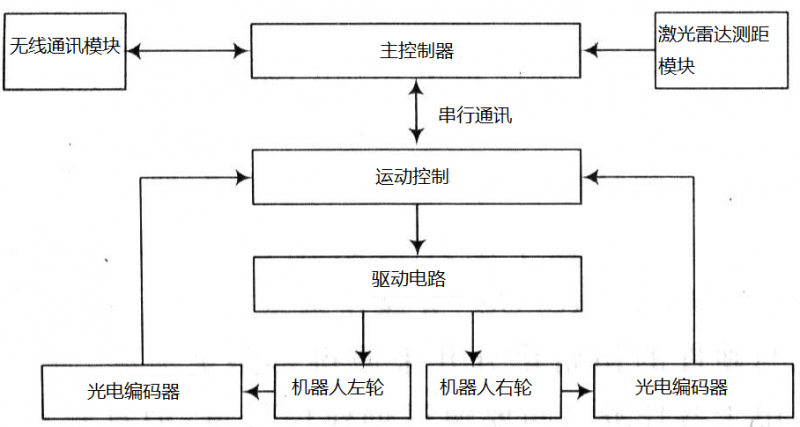
图2 基于单片机的机器人控制系统图
4 结语
当前我国多个行业领域都广泛应用机器人,特别是工业生产领域,机器人已成了人工不可代替的一部分。通过单片机控制实现对机器人的视觉、语音、自动调整等功能,让机器人在单片机的控制下,可以实现基础性人机交换和显示等功能,拥有自控能力,学习能力,理解能够,能通过对外界信息数据的分析得到相应的结果去执行,从而减少人工干预。综上所述,单片机控制系统智能机器人的应用价值非常高,因此需要加强研究工作,使其在未来发挥更大的作用。
参考文献:
[1]张续伟. 机器人单片机控制系统的设计与实现研究[J]. 科技风,2020,(2):29.
[2]唐明会,高进可,王琪. 基于电磁导航的高速轮式机器人控制系统的设计与实现[J]. 自动化技术与应用,2019,38(5):45-47,86.
[3]王勇,祝鑫,朱嘉敏, 等. 机场服务机器人控制系统设计与研究[J]. 现代机械,2019,(1):25-31.
[4]夏斯维,陈迅. 基于51单片机的多自由度工业机器人控制系统设计[J]. 电脑迷,2018,(16):247-248.
[5]赵瑞林,卢庆林,张顺星. 教学型双足步行机器人的结构及其控制电路设计[J]. 计算技术与自动化,2014,33(2):73-76.
[6]侯文芳,曹国华. 单片机在便携式智能小型采摘作业机器人的应用[J]. 农机化研究,2016,(10):213-216,222.
作者简介:
张忠雨,女,重庆永川人,硕士,主要研究方向:电工电子、单片机控制等,






共0条 [查看全部] 网友评论