


关键词:SCARA工业机器人;PLC控制系统;运动控制
Abstract: SCARA industrial robot has been widely used in the fields of automobile manufacturing, electronic products industry drug production and food processing,as its advantages of high control accuracy and fast running speed. This paper introduces the structure of SCARA industrial robot and studies its motion control method. It analyzes the scheme and law of motion control of SCARA industrial robot driven by PLC servo motor.
Key Words: SCARA industrial robot; PLC control system; Motion control
1 前言
随着现代工业的不断升级,智能制造与工业机器人技术逐渐成为生产制造型企业所关注的热点。工业机器人是智能生产线的重要组成部分,机器人控制技术是智能制造的关键技术之一。SCARA工业机器人是一种关节型装配机器人,被广泛应用于工业生产和教学实验研究中。在实际生产中,SCARA工业机器人因其在水平方向上很好的顺应性和在垂直方向极大的刚性被应用于诸如汽车制造、电子产品生产、食品加工等领域;在教学实验中,它能够让人们更直观地了解机器人结构组成、动作原理等。因此将PLC控制技术与SCARA工业机器人相结合,研究其控制原理和特点是具有广泛的实际意义和应用前景的[1]。
2 SCARA工业机器人功能结构和动作原理分析
SCARA工业机器人中文全译名为选择性顺应装配机器人手臂,是一种圆柱坐标型工业机器人,被广泛应用于工业生产的多个领域。SCARA工业机器人一般具有3个旋转关节和1个(垂直)移动关节,如图1所示。所有关节均由伺服电机驱动,3个旋转关节的旋转轴线平行,在伺服电机驱动下围绕轴线实现旋转定位;垂直方向上的移动关节实现机器人终端负载的上下移动[2]。

至此我们就得到了SCARA工业机器人对应空间目标坐标点各伺服电机的运动方向和运动角度。结合上述计算的结果,我们采用PLC加伺服运动控制器来驱动伺服电机,以达到SCARA工业机器人最终空间目标状态的调整。
3 SCARA工业机器人PLC控制系统设计
在对SCARA工业机器人使用PLC控制时,我们选用罗克韦尔公司的控制产品,主要产品包括:PLC控制器(CPU)、伺服电机及伺服驱动控制器、远程IO产品、人机交互触摸屏以及工业交换机等。PLC控制器与系统各部分组成单元采用Ethernet/IP通讯协议进行数据的交互,实现对伺服电机的运动控制以及对整个机器人控制系统的逻辑控制。PLC控制器可选用罗克韦尔最新的5380系列产品型号5069-L320ERM,该控制器支持千兆以太网通讯速率,可以更大地提高机器人及控制系统整体的实时性。机器人控制系统输入输出信号通过分布式远程IO进行采集和传输,远程IO通讯模块选用支持以太网环网的通讯1734-AENTR模块。伺服电机则根据SCARA工业机器人响应速度快,动作频繁的特点选用MPL/VPL低惯量伺服电机,配以Kinetix5700伺服驱动器驱动控制[2]。SCARA工业机器人PLC控制系统组成如图3所示。
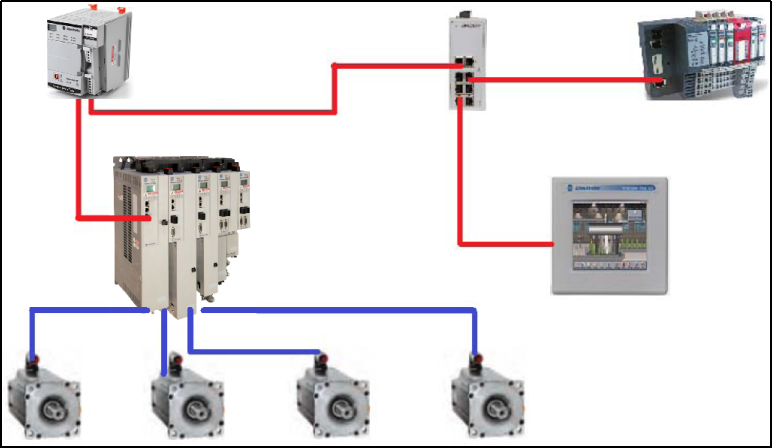
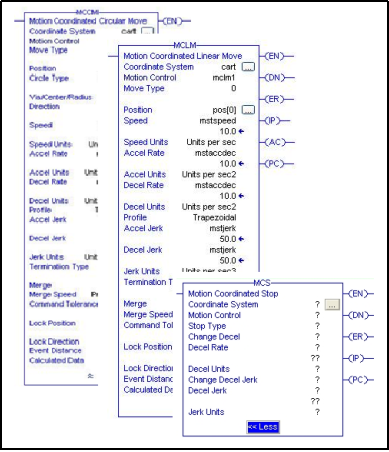
图3 SCARA工业机器人PLC控制系统组成 图4 运动控制指令
控制程序方面,使用罗克韦尔的Studio5000开发软件进行程序的组态和开发。Studio5000软件提供了变量标签功能,无论是外部的IO信号变量,还是伺服电机都使用标签变量名进行定义。伺服电机在建立了电机标签后我们可以对其型号以及各属性进行编辑,通过目录编码从电机数据库中选定实际使用的电机型号加以关联确认就可以导入电机的基本参数,例如额定功率、额定转速和转矩等。之后对该电机应用的类型、传动比、位置环、速度环及转矩/电流环的带宽、原位信号和限位信号属性等进行编辑和设定。同时Studio5000软件还提供了丰富的程序功能块、AOI功能封装及变量类型自定义等功能,这些功能对程序的优化修改、移植调用提供了极大的便利。罗克韦尔PLC控制系统采用的是Ethernet/IP标准以太网通讯协议,以此为基础,各个设备和生产单元可以很方便的纳入到车间级或者企业级的管理系统中,进行生产运行数据的采集和管理。
在对SCARA工业机器人伺服电机进行运动控制时,最简单的方式就是各伺服轴单独控制运动。根据计算得出的旋转角度,分别对各伺服轴的运动速度、加速度、运行角度等参数进行赋值并执行定位的运动指令MAM。这种方式操作简单但是控制效果不好,每个伺服轴的运行参数都要单独给定,往往运行角度小的伺服会更快完成动作,然后等待运行角度大的伺服运行到位,整体系统的动作连贯性不好。为了提升整体系统的动作连贯性,可以使用伺服直线运动插补指令和曲线运动插补命令来控制SCARA工业机器人的伺服运动,具体操作指令为MCLM(Motion Coordinated Linear Move)和MCCM(Motion Coordinated Circular Move),直线插补和曲线插补运动的目标位置坐标用数组的形式写入到指令的对应位置,同时对运动的类型、插补运动的加速度、减速度等参数进行设置。在使用插补指令对伺服运行轨迹进行控制的过程中,我们可以随时使用插补停止指令MCS控制系统进行中断操作停止插补运行[4]。运行相关指令如图4所示。
4 结束语
SCARA工业机器人以其定位精度高,运行速度快、水平方向上的顺应性和垂直方向极大的刚性等特点被广泛应用于汽车制造、资讯家电等领域。随着工业生产技术的进步,智能制造和机器人协作的发展和应用,SCARA工业机器人必将向着系统化、智能化方向发展,未来的应用领域也都会更加广泛。本文研究了SCARA机器人和PLC控制的结合应用,运用PLC控制技术对SCARA机器人进行运动轨迹的规划与控制。另外罗克韦尔控制系统的Ethernet/IP标准以太网通讯协议,有利于单独的设备或生产单元纳入到车间级和企业级的数据采集和管理系统中,为智能生产线的建立以及智能制造系统的集成提供了基础。
参考文献:
[1]方健,刘君义,王冬铀. SCARA平面关节工业机器人通用控制器设计[J]. 吉林工程技术师范学院学报,2008年7月.
[2]杨明,张如昊,朱昊天,等. SCARA四轴机器人控制系统综述[J]. 电气传动,2020年第50卷 第1期.
[3] 罗克韦尔. Kinetix Servo Drives Specifications[Z]. 罗克韦尔自动化公司,2016.
[4] 罗克韦尔. Logix5000控制器高级过程控制和驱动指令参考手册[Z]. 罗克韦尔自动化公司,2011.




共0条 [查看全部] 网友评论