



关键词:苹果分拣;机器视觉;PLC;机器人
Absrtact: Apple's classified and classified sale is an effective way to increase income,Traditional artificial apples have low efficiency, long time consumption and low accuracy, which is difficult to meet demand In this paper, a combination of PLC and machine vision is used to design an apple sorting system based on machine vision. The features of the apple are obtained and discriminated by the image acquisition and processing unit. Finally, the collected feature signals are converted into digital signals. To control the robot to grab and classify apples, it can sort quickly and accurately, improve work efficiency, and increase apple sales.
Keywords: Apple sorting; machine vision; PLC; robot.
中图分类号:TP273 文献标识码:A
1.研究背景
苹果的分类分级销售是苹果销售电商增收的有效手段之一。但是传统的人工分拣方式效率不高,劳动强度大,难以满足现代化农业及电商的需求。机器视觉是利用机器模拟人的视觉功能,具有快速、精确、稳定的特点,能实现与人类视觉有关的智能行为。目前,该技术已在农业机械得到了一定的应用[1]。本文基于机器视觉,设计了一套苹果分拣系统,通过图像采集和处理单元来获取与判别苹果的特征,随后PLC控制单元根据判别的结果支配机器人完成苹果的抓取与归类,最终实现苹果的分类分级工作。
2. 分拣系统结构及工作流程
2.1系统结构及各硬件的功能
基于机器视觉的苹果分拣系统的硬件结构如图1所示,系统硬件包括光源、镜头及相机、图像采集卡,图像处理系统、显示器、PLC、机器人、测试台以及光源控制器等。其中,光源及控制器为视觉系统提供充足的照明,以合适的方式将光照射在苹果上,凸显苹果的特征。镜头把测试台上的苹果成像到相机中的视觉传感器的靶面上,将其转为模拟量信号。随后,图像采集卡把模拟量的图像信号转化为数字信号。图像处理系统对采集的图像进行及时的存储,并在图像处理软件的协助下进行图像的处理,给出测量结果。PLC依据测量结果输出相应的机器人控制信号。
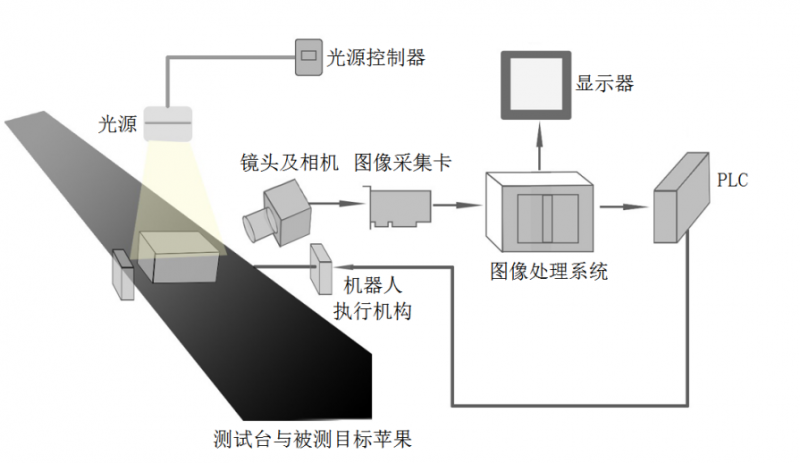
图1 基于机器视觉的苹果分拣系统的硬件结构
2.2系统的工作流程
首先苹果在测试台上依次的送入检测区,当传感器检查到苹果后,图像处理系统控制相机进行高速地拍照,实现图像的采集。然后图像采集卡除了完成图像信息的模数(A/D)转换,并且高速、大数据量的把信息传输至图像处理系统,实现图像信息的转化及传递。随后,图像处理系统通过一系列的处理及计算,得到苹果的品质以及机器手抓取位置等信息。最后,PLC依据图像处理系统传递过来的信息,控制工业机器人对苹果进行抓取和归类,完成苹果分级工作。图2显示了基于机器视觉的苹果分拣系统的工作流程图。

图2 基于机器视觉的苹果分拣系统的工作流程图
3.基于机器视觉的苹果分类与位置检测
3.1图像采集
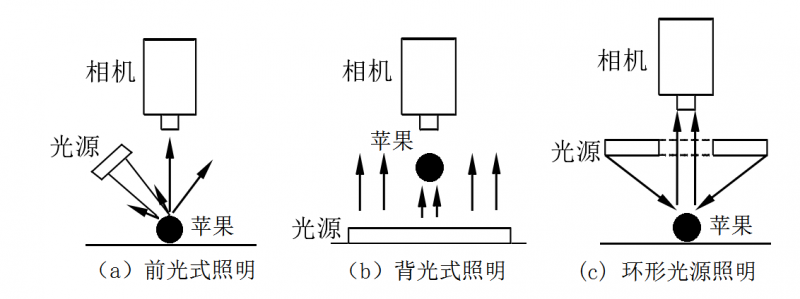
苹果图像的采集主要是通过镜头和摄像机完成的。通过改变镜头的视场角及焦距,能使相机成像单元获得清晰的苹果图像,并且在调试镜头时应考虑到苹果观测范围以及图像的成像质量,减小测量不足和图像畸变的现象发生。摄像机是获得图像的前端设备,其通过光电传感器获得的图像信号。摄像机的主要技术参数有分辨率、帧速等,在其选用时应考虑到苹果的检测工况,选用合适的相机,减少性能的浪费。此外,采用恰当的光源技术是获得良好的苹果特征的前提保证。光源技术主要有前光式照明、环形光源照明、背光式照明等类型[2-3],图3所示三种不同形式的苹果打光方法。其中,环形光源能提供大面积均衡的光照,能极大的减少苹果的阴影,提高对比度。因此,采用环形光源照明更合理。
3.2苹果的分类
苹果的主要是通过其大小和颜色来分类分级的。通过大小划分苹果种类,可分为大果、中果、小果三种类型。通过颜色来区分苹果品级,可分为红度高、红度低两种品级。
苹果的大小可以通过轮廓面积来区分。在机器视觉中,面积测量主要有两种方法[4-5]。第一种为基于区域标记的面积测量法,在已知图像中待测苹果所在的区域,通过计算该区域内的像素点的个数得到其面积,但是当图像中有多个检测物时,需要采用额外的判定方法。第二类为基于轮廓向量的测量面积方法,通过轮廓向量分析的方法提取苹果的边缘轮廓,其具有简单、高效求解的特点。综合考虑两种测量方法的特点,基于轮廓向量的测量,对于测量苹果不规则轮廓的面积会更加高效。因此采用该算法提取苹果轮廓面积。图4显示了苹果轮边缘轮廓提取,然后再通过算法求出轮廓内的面积。
苹果的颜色区分,通过红度的高低来判断的。在机器视觉中,颜色的处理技术有RGB(红、绿、蓝)计算模型和HSI(饱和度、色调、亮度)计算模型[6]。采用HSI计算模型,来判苹果的色泽及红度更为合适。

图4 苹果轮廓提取
3.3苹果的位置检测

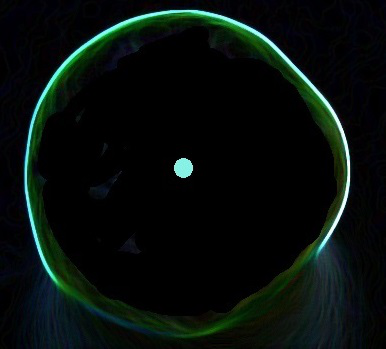
图5 苹果的几何中心
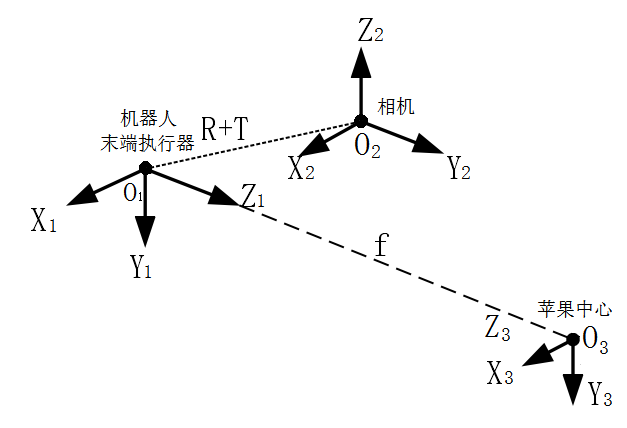
图6 机器人末端执行器、相机、苹果几何中心三者之间的空间坐标系位置关系
4.机器人抓取及分拣
图像处理系统对苹果进行分类和位置检测处理后,将结果信号传递给PLC。随后,PLC根据结果输出相应的机器人控制指令。机器人接受到控制指令后,对苹果进行抓取和归类。其中苹果归类有6种分别为,大果红度高、中果红度高、小果红度高、大果红度低、中果红度低、小果红度低。最后机器人分别将这6类不同品质的苹果,放置到不同的货箱中,完成苹果的分类分级工作。
5. 结论
本文主要阐述了基于机器视觉的苹果分拣系统的硬件构成和工作流程,分析了苹果的图像采集、分类及特征提取方法和机器人抓取、归类苹果的工作流程。通过视觉检测系统准确进行苹果颜色、大小的提取,利用苹果的几何中心定位建立苹果中心点,使机器人末端执行器准确抓取,随后通过PLC总控进行了有效分拣,实验证明基于PLC和机器视觉的苹果分拣系统能够准确识别和分拣,误差低,速度快。
6. 参考文献
[1]张伟华.机器视觉及其在农业机械中的应用[J].山东广播电视大学学报,2019(03):86-88.
[2]郝飞,史金飞,朱松青,张志胜,韩亚丽,陈茹雯.机器视觉系统前置矩形LED阵列的优化布置[J].光学学报,2014,34(12):175-180.
[3]严旭果,高亮.圆钢表面图像采集系统设计及关键技术研究[J].测控技术,2019,38(06):38-43.
[4]韩九强.机器视觉技术及应用[M].高等教育出版社,2009.
[5]郝雅洁,张吴平,史维杰,赵明霞,吕致,李富忠.基于计算机视觉的小麦叶面积测量[J].湖北农业科学,2019,58(16):129-132.
[6]黄金荣,张冰雪,张悬光,李瑞丰.基于机器视觉的颜色识别系统设计[J].山东工业技术,2019(12):208.
[7]徐洪. 基于机器视觉的目标识别与定位系统设计[D].西南科技大学,2019.
[8]赵霞,袁家政,刘宏哲.基于视觉的目标定位技术的研究进展[J].计算机科学,2016,43(06):10-16+43.
项目名称:基于机器视觉的水果精准分拣及包装关键技术创新研究与实践,基金号:KJQN201905405
作者简介:杨小强(1983-),男,汉族,甘肃天水,学士,讲师/高级技师,研究方向:电气控制及智能控制,电话:13527346353(E-mail)281383501@qq.com






共0条 [查看全部] 网友评论