



关键词:永磁同步电机;五电流矢量预定位;转子初始位置
Abstract: Permanent magnet synchronous motors are used in industry due to their many advantages and good performance. Controlling permanent magnet synchronous motors typically utilizes vector control, while vector control assumes the correct position of the rotor. In the control system of permanent magnet synchronous motor based on incremental encoder, the initial position detection of the rotor is the key of the current control system of permanent magnet synchronous motor. To solve this problem, a five-current vector rotor pre-positioning method is proposed. The method sequentially generates five current vectors of equal size and fixed direction in the stator of the permanent magnet synchronous motor, and uses the electromagnetic torque generated by the interaction between the stator winding current and the rotor to drag the rotor to the set position to realize the rotor reservation. Bit. Finally, the proposed pre-positioning strategy is verified by simulation, and the incremental encoder installation error is corrected when the I pulse does not coincide with the A-axis.
Key words: Permanent magnet synchronous motor; Five current vector pre-positioning; Rotor initial position.
1 引言
针对增量式光电编码器,先阐述了基于转子预定位的 PMSM 转子初始位置检测方法,导出了定子电流矢量的产生方法,该方法能将电机转子预定位至零度位置,从而确定电机转子的初始位置[1],再此基础上,本文提出一种五电流矢量转子预定位策略确定转子初始位置。在同步坐标系中依次产生大小相等、方向相差π/2的五个恒定电流矢量,利用定子绕组电流与转子磁场相互作用产生的电磁转矩,将转子引至最后一个恒定电流矢量施加的位置实现转子预定位。这种方法的优点是简单直观、实现容易,且解决了只施加一个方向的电流矢量造成的定位误差可能较大的问题。对于大容量永磁电机来说,由于较大转动惯量引起的预定位误差相对较小。本文对整个转子预定位运动过程进行了仿真分析,仿真结果表明,所提策略能够使转子平稳到达目标位置。并对编码器I信号校正问题进行研究,完成编码器的校正后,使用增量式编码器能够准确获得转子初始位置。
2 转子预定位原理
预定位法原理是向PMSM施加一个固定方向的电压矢量,借此将转子拖动到它所确定的方向,从而检测转子初始位置。在施加一个电压矢量之后,就会产生一个定子磁势,PMSM的永磁体就会产生一个转子磁势。此时电磁转矩方程为:

这个定子磁势与转子磁势存在一个夹角,根据式(1)可知,电磁转矩会这个夹角逐渐减小,电磁转矩也会因此减小,最终达到一个平衡点。最终电磁转矩将转子定位到定子磁势所确定的方向,完成了预定位转子。定子和转子的磁势越大,电磁转矩也越大,预定位就越精准[2]。
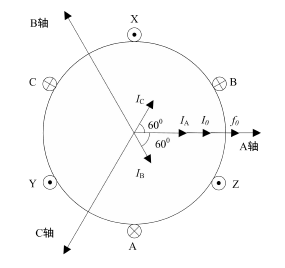
图1 A相电流最大时合成的定子电流矢量与磁动势

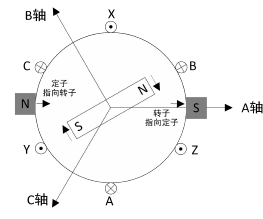
磁动势由定子指向转子时,该极设为N极;磁动势指向定子时,该极为S极。由此可知,I0产生的理想定子磁场如图2中阴影部分。
转子被预定位至零度位置时,产生恒定的定子电流矢量I0是关键,定子电流矢量I0是三相定子电流矢量的合矢量,其电流关系为:
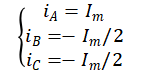 (2)
(2)
经过Clarke和Park变换后,电流从静止坐标系等效到同步旋转坐标系。在定子电流矢量的作用下,转子被拉至零度位置,因此Park变换中的转子角度设为0°,由此可得:
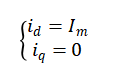 (3)
(3)
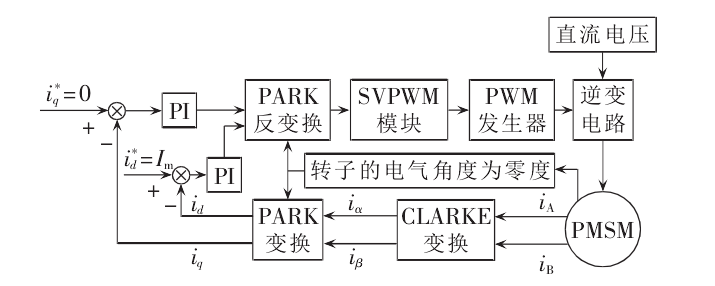
式(3)表明,![]() 就可以产生恒定的定子电流矢量I0。在同步旋转坐标系下,PMSM矢量控制通过电流环可以控制d、q轴定子电流,故将矢量控制策略去掉速度环,只保留电流环,且给d轴电流定值,q轴电流为零,且转子的电气角度为零度,即可产生恒定的电流矢量[3]。
就可以产生恒定的定子电流矢量I0。在同步旋转坐标系下,PMSM矢量控制通过电流环可以控制d、q轴定子电流,故将矢量控制策略去掉速度环,只保留电流环,且给d轴电流定值,q轴电流为零,且转子的电气角度为零度,即可产生恒定的电流矢量[3]。
3 五电流矢量预定位法
五电流矢量转子预定位法实现过程是在永磁同步电机的定子中依次施加大小相等、方向固定的五个电流矢量,利用定子绕组电流与转子相互作用产生的电磁转矩,将转子拖动至设定位置实现转子预定位。
本文采用的五电流矢量转子预定位策略如图4所示,五个电流定位矢量的方向分别用五个虚拟同步坐标系表示,图4中给出了这五个虚拟同步坐标系的d-q轴。本文采用的四个预定位电流矢量电角度分别为0、π/2、π、3π/2、2π五个电流矢量轮流实施,逐步引导转子到达最终目标位置2π电角度处。
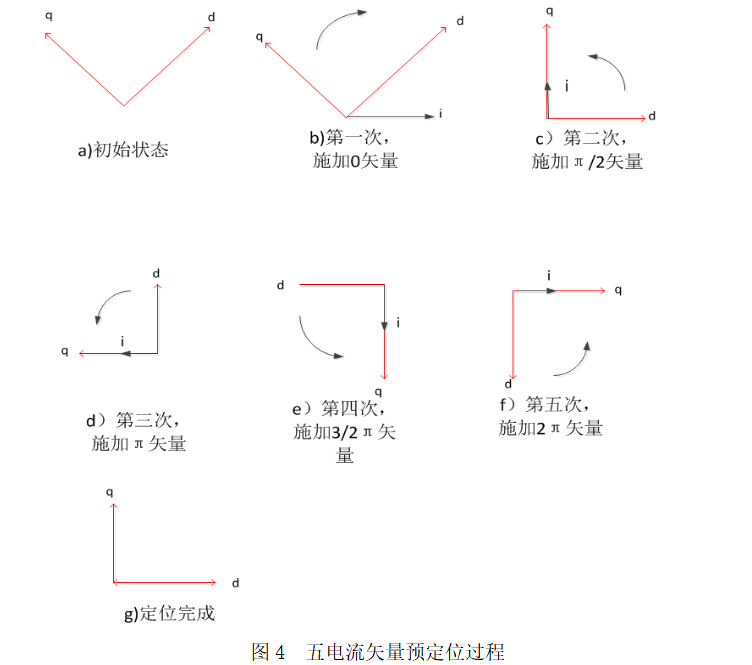
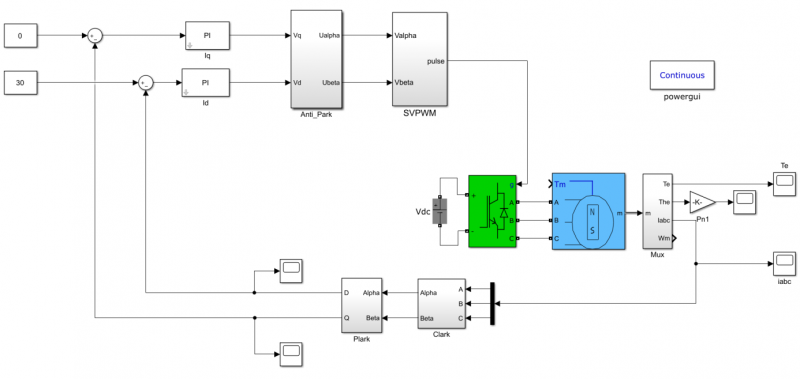
图5 五电流矢量仿真模型
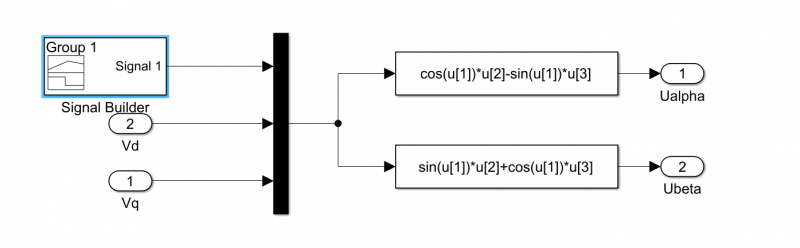
图6 坐标变化模型
仿真程序中通过Signal Builder模块每隔1秒就改变一次电流矢量的方向,即以90°递增,使电机在这种情况下旋转一周,最后转子被拖动至与A轴重合。定位矢量分别为0°、90°、180°、270°、360°。当转子初始位置设置分别为45°和225°,转子位置示波器图如图7-图8所示。
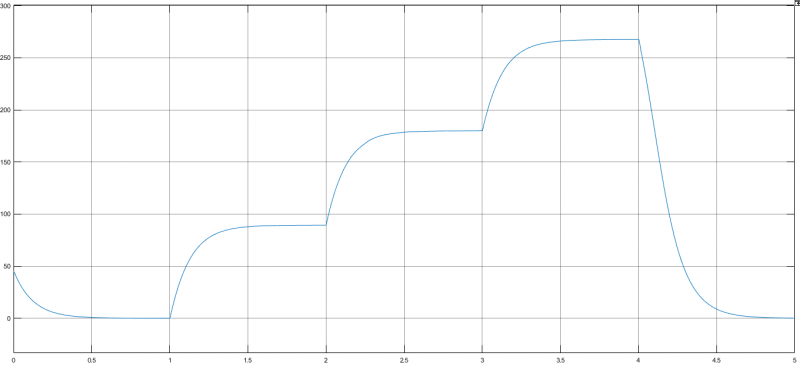
图7 转子初始位置设为45°时
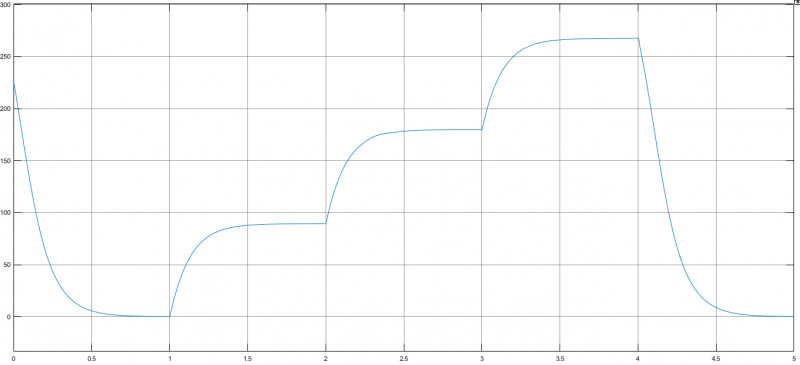
图8 转子初始位置为225°时
仿真结果表明:通过仿真图像,转子位置从初始角度45°或者225°,一段时间内分别到0°、90°、180°、270°、360°处。证明五电流矢量预定位策略可以实现转子位置准确定位,当转子初始位置在任意位置时,均可以实现对转子的成功引导。
5 编码器校正
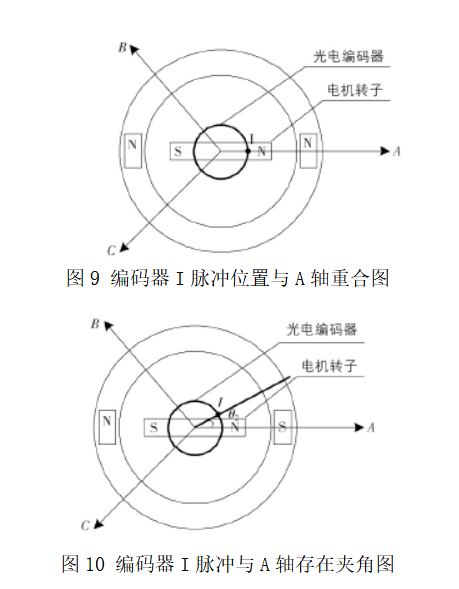
由于使用的是增量式编码器,对于安装精度不高导致编码器输出脉冲的I相不能与电机A轴重合的情况,需对编码器安装时的误差进行测量与校正。编码器I脉冲位置与A轴重合图如图9所示。首先,应用五电流预定位法对永磁同步电机进行初始定位,将转子定位至A轴,转子在A轴位置时控制器中计数值为α;电机顺时针旋转,在进入中断程序时记录下I信号发出的位置计数器的数值β;根据![]() (n为编码器线数),计算索引信号I与A轴夹角
(n为编码器线数),计算索引信号I与A轴夹角![]() (如图10所示),得出永磁同步电机编码器安装误差[4];最后将安装误差引入系统控制器程序加以校正,得出电机初始定位后的转子位置。
(如图10所示),得出永磁同步电机编码器安装误差[4];最后将安装误差引入系统控制器程序加以校正,得出电机初始定位后的转子位置。
6 结论
本文首先阐述了基于转子预定位的PMSM转子初始位置检测方法,分析了定子电流矢量的产生方法,得出预定位策略控制框图。在此研究基础上,提出一种五电流预定位方法,该方法能够减少施加一次电流矢量将转子预定位至零度造成误差较大的问题。施加五个方向的电流矢量后,转子预定位至已知位置,在永磁同步电机起动前,对增量式编码器完成了校正,使得获取精确的转子电气角度,实现电机的平稳起动。
参考文献:
[1] 陈容,严仰光. 永磁电机的转子位置检测与定位[J]. 中小型电机, 2003, 30(3):61-65
[2] 杨立,陈为奇. 永磁同步电机转子初始位置检测研究[J]. 电气传动,2012,42(3):57-61.
[3] 黄科元,周李泽,周滔滔,等. 一种增强可靠性的永磁同步电机初始角检测[J]. 电工技术学报,2015,30(1):45-51.
[4] 鲁家栋,刘景林,卫丽超. 永磁同步电机转子初始位置检测方法[J]. 电工技术学报,2015.30(7):105-111.
作者简介:
孙晓钰 大连交通大学硕士研究生在读 研究方向 轨道车辆运行控制及自动化






共0条 [查看全部] 网友评论