



关键词:无刷直流电机;起动;最小二乘法;拟合插值
Abstract: According to the problems existing in the start-up phase of the sensorless brushless DC motor, using the characteristics of the commutation time and the bus voltage during the start-up process of the brushless DC motor, a starting method based on the least squares fitting interpolation method is proposed. This method collects the bus voltage and the sample data corresponding to the start commutation time, takes the bus voltage value as the input and the start commutation time as the output, and fits the interpolation function between the two by the least squares fitting interpolation method. Simulation experiments show that the least-squares fitting interpolation method can make the motor start smoothly and achieve stable start under no-load or light-load conditions.
Key words: Brushless DC motor; Start; Least squares; Fit interpolation
1 引言
无刷直流电机是一种不使用机械结构换向电刷而直接使用电子换向器的新型电机。这种电机在使用中有许多优点,比如:能获得更好的扭矩转速特性、高速动态响应、高效率、长寿命、低噪声、高转速、无换向火花、运行可靠和易于维护等。无刷直流电机要转动,必须先根据转子位置传感器输出的转子位置信号确定转子位置,然后通过换相电路工作,驱动电机绕组通电,在定子上产生旋转的磁场驱动永磁转子转动[1]。
但是在某些应用场合中,难以安装位置传感器,或者就算是安装好,也很容易损坏;位置传感器的存在不仅增加了电机本身的结构尺寸,提高了电机的运行成本,在要求较高的系统中工作特性也多多少少被限制。目前较为成熟的无位置传感器的无刷直流电机的位置估计方法为反电动势法[2-6]。但是在电机起动阶段以及刚开始低速运行阶段,转子产生感应电势十分困难,采用反电动势法起动较为困难。针对这一问题,许多学者都提出了解决方案。文献[7-9]介绍了预定位起动法,在初始状态下确定无刷直流电机的任意两相绕组的位置处于通电状态,在电磁力的作用下,转子旋转到预定的初始位置,实现对转子的预定位。然后通过转子转向和位置改变绕组的通电相序,同时检测未导通相的反电势过零点,并通过改变触发脉冲的占空比来提升外加电压。该方法一般适用于空载,在带负载条件下需要根据实际情况重新调整预设时间,避免出现起动失败或反转情况。文献[10-13]介绍了三段式起动法,三个阶段分别是转子预定位、外同步加速和切换状态。首先对转子进行预定位,然后经过外同步加速驱动电机运转,一般可以通过恒频升压法、恒压升频法和升频升压法使电机逐步加速;最后通过测速模块检测,达到预定转速后切换到反电势法控制运行。
根据电机起动时的换相时间与母线电压相关的特征,本文通过采集不同母线电压启动时的换相时间,再利用最小二乘法拟合插值法拟合出一个关于母线电压和换相时刻的插值函数,电机就能够在任意母线电压下完成电机的起动。
2 基于最小二乘法拟合插值法的无位置传感器无刷直流电机的起动
2.1 拟合插值法起动原理
在直流电机中,电机的起动时间方程如下
2.2 起动时刻数据采集及拟合
为了能够得到准确的电机起动换相时刻的数据,选择在带有位置传感器的情况下进行数据采集,可以选用带霍尔传感器的无刷直流电机。
首先利用软件给电机任意特定两相导通,将转子拖动到指定的初始位置,这样就能够确保电机在起动时的导通时间为前两相完整的导通时间;然后通过改变母线电压,采集不同母线电压下的电机起动的换相时刻;最后通过最小二乘法拟合插值法拟合出相应的函数关系,所采集的对应数据越多,拟合函数与实际越接近。
本文所采集的母线电压和第一个起动换相时刻对应数据如图1所示。所有试验点数据采集完成后,利用最小二乘曲线拟合插值的方法,拟合出母线电压与对应换相时刻的曲线。
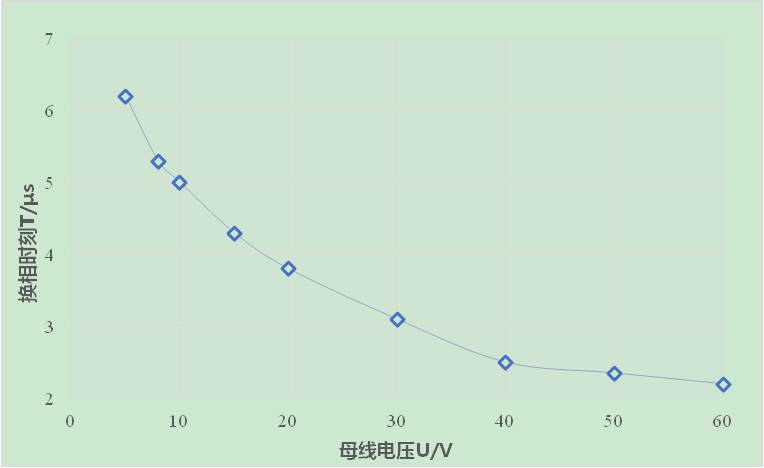
图1 母线电压与换相时刻对应数据拟合曲线
由于所需插值拟合的曲线是非线性拟合关系,所以利用多元函数极值理论求解拟合曲线的未知数时比较困难,通常采用变量代换的方法将问题线性化,得到所拟合函数的最优解。
2.3 基于最小二乘法拟合插值的无位置传感器无刷直流电机起动
开环过程中,在一套无刷直流电机中给定任意的母线电压作为输入,经过在6个换相时刻的插值拟合曲线中获得的起动换相时刻,经由逆变器将信号送至电机,使电机完成换相起动。
闭环过程中,由于母线电压随着反馈的PI控制器的不断调节而不断变化,从而得到的电机的换相时刻也在实时改变,由逆变器给出的换相信号也在实时调整,使电机在起动过程中始终能够获得准确的换相信号。
换相起动结束后,将电机切换到反电动势状态运行。切换过程可以通过测速模块的检测,达到预定稳定的转速后,进行切换。也可以通过软件,设置当时间大于第6个,即最后一个换相时间后,就切换到反电势运行。
3 仿真试验
仿真试验利用MATLAB试验平台,在Simulink中搭建无刷直流电机工作模型。电机的部分参数如下:额定电压U=24V,额定转矩TN=0.32N.M,额定转速n=3000rpm,反电动势系数K=0.0657V/(rad/s),相电阻R=0.5Ω,转动惯量J=1.83x10-6kg.m2,极对数p=4。
在开环试验环境下,给定母线电压U=18V,仿真电机起动时的波形。图2是拟合插值法给出的起动信号以及仿真模型实际的霍尔起动信号。由图可知,在起动信号最后一次跳变结束时刻即0.015s之后,电机由起动状态切换到反电势运行状态。可以得出结论,电机能够通过拟合插值法在任意给定母线电压下完成起动,并能成功切换到正常反电势运行状态。
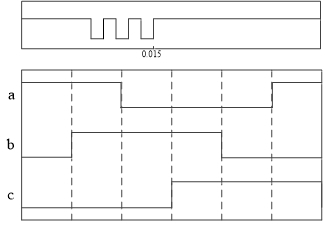
图2 起动信号和霍尔信号
开环情况下的电机转速图如图3所示。其中图3是通过拟合插值法起动的电机转速图。由图可知,通过拟合插值法起动的方法能够将电机在任意母线电压下拖动起动,在起动完成后能够切换至反电势方法运行,并保持转速平稳运行。

图3 电机起动转速图
开环情况下的电机转矩图如图4所示,图4是通过拟合插值法起动的电机转矩图。由图4可知,电机在起动到切换到反电动势运行过程中,转矩发生轻微抖动,但总体呈平稳状态。
图4 电机起动转矩图
4 结论
本文提出的利用拟合插值法进行无刷直流电机的起动方法,避免了借助额外的外接电路连接电机,可以减少无必要的电机外部尺寸增大。该起动方法适用于开环和闭环情况下电机起动,在电机承受范围内,改变母线电压至任意值,电机都能够完成起动。避免了传统的电机初始起动困难,起动不稳定或失败的情况,具有一定的使用价值。
参考文献:
[1] 黄李威, 林荣文, 文思奇. 无刷直流电机控制系统的研究[J]. 电气开关, 2018, 56(05): 36-39+44.
[2] 姚冲,杭帆,朱文秀, 等. 无位置传感器无刷直流电机控制系统的研究与设计[J]. 电源世界, 2019(03): 18-23.
[3] 赵熠, 黄海波, 卢军, 等. 无感无刷直流电机控制系统的研究与设计[J]. 微电机, 2018, 51(12): 48-52.
[4] 梅妮, 尹华杰. 反电势法在无刷直流电机位置检测中的应用[J]. 电机技术, 2006(1): 44-46,48.
[5] 王强, 王友仁, 王岭, 等. 无位置传感器无刷直流电机闭环起动方法[J]. 电机与控制学报, 2013, 17(11): 41-46.
[6] Kim T, Lee H W, Ehsani M. Position Sensorless Brushless DC Motor/generator Drives: Review and Future Trends[J].IET Electronic Power Application, 2007, 1(4): 557–564.
[7] 王哲, 闫学文, 梁亮. 无位置传感器无刷直流电机启动系统研究[J]. 计算技术与自动化, 2016, 35(02): 20-24.
[8] 罗隆福, 杨艳. BLDCM无位置传感器换相检测和开环起动的软件实现[J]. 微特电机, 2002, 30(3): 39-41.
[9] 茅正冲. 无传感器无刷直流电动机起动过程分析[J]. 微电机, 2008, 41(1): 82-84.
[10] 朱俊杰, 粟梅, 王湘中, 等. 无位置传感器无刷直流电机闭环三段式启动策略[J]. 仪器仪表学报, 2013, 34(01): 173-179.
[11] 郝玲玲, 瞿成明, 乔永鸣. 无位置传感器的无刷直流电机起动方式研究[J]. 重庆理工大学学报(自然科学), 2015, 29(05): 119-123.
[12] 张劲恒, 杨扬. 无刷直流电动机无位置传感器闭环控制研究[J]. 微特电机, 2018, 46(08): 84-87+92.
[13] 刘红平, 崔儒飞, 高慧敏. 无刷直流电机无位置传感器的启动研究[J]. 装备制造技术, 2014(09): 243-244.
作者简介:
李磊(1980年 -) 男,注册电气工程师,从事工厂电气设计、驱动系统设计等方面的工作。






共0条 [查看全部] 网友评论