



关键字:滑模理论;矢量控制;永磁同步电机
Abstract: Permanent magnet synchronous motor control needs accurate rotor position information to ensure the stability of torque output. It usually adopts the position sensor installed at the shaft end to obtain the position information, which increases the use and maintenance cost of the product. In this paper, based on the theory of sliding mode control, the observer is constructed, the rotor position is derived from the observation of the reverse potential of the motor, and the rotor position is applied to coordinate transformation. Finally, a simulation model of sensorless vector control based on the sliding mode observation period was built in Matlab/Simulink environment, and the simulation results verified the feasibility and accuracy of the scheme.
Key words: Sliding mode theory; Vector control; Permanent magnet synchronous motor
1 前言
随着电力电子技术、数字信号处理技术以及控制理论的发展,交流电机调速系统的性能已经可以媲美直流电机控制系统[1]。其中基于交流电机动态模型的控制方法发展最为迅速,1971年,德国西门子公司的Blaschke提出了矢量控制理论,它基于直流调速系统的控制思想对异步电机进行矢量解耦,实现磁链和转矩的独立调节,达到了与直流调速系统同样的动态响应性能;1985年,德国鲁尔大学M.Depenbrock提出了直接转矩控制理论,是一种基于定子磁场定向的控制方式,其数学模型简单,具有更优良的动、静态性能。目前两种控制方式均在工业、轨道交通、新能源汽车领域广泛应用。但是无论哪一种电机控制策略,调速控制均依赖于电机的转速反馈信息,而速度传感器的安装使用与维护存在诸多安全隐患,为解决这些问题,国内外学者对交流电机无速度传感器控制进行了大量的研究[2][3][4][5]。1975年A.Abbondanti等人推导出基于稳态方程的转差率估计方法,在无速度传感器控制领域做出了首次尝试[7],1982年R. Joetten首次将无速度传感器技术应用于矢量控制,推动了无速度传感器技术发展[8]。
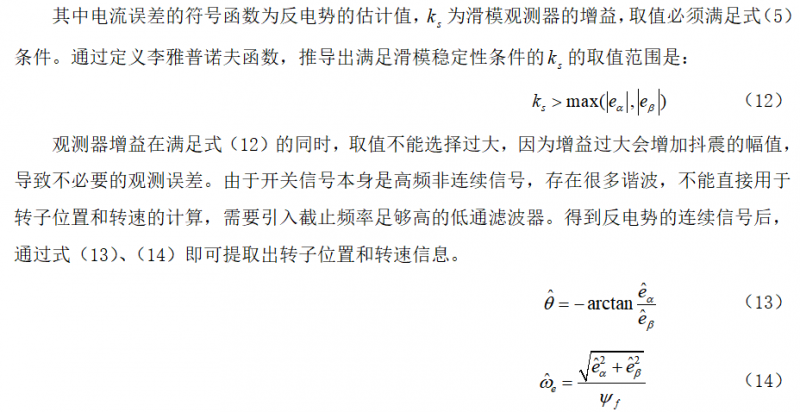
滑模变结构控制是对非线性不确定系统的一种有效控制方法,通过相同变量的输出误差构成符号函数,并在不同的状态面上进行切换,最终达到一种动态稳定,其控制结构简单,对参数鲁棒性较好。本文通过分析电机数学模型,推导出基于滑模理论的电机反电势观测器,再根据电机稳态方程得到电机转子位置和转速信息,并运用于矢量控制。最后基于Matlab/Simulink平台仿真验证了该方案的可行性。
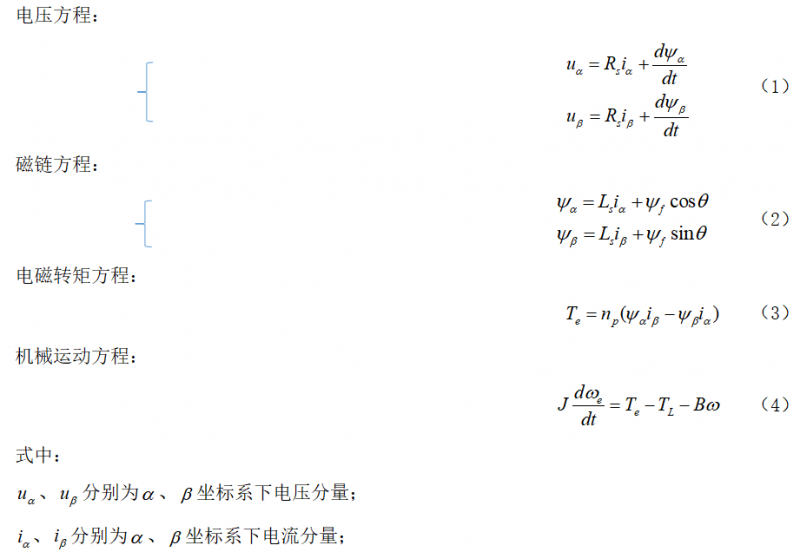
2 永磁同步电机数学模型
由于电机本身是一个高阶次、非线性、强耦合的多变量系统。而且与采用正弦交流电源驱动的电机系统相比,永磁同步电机一般采用PWM脉冲电源驱动,其电压和电流存在大量谐波,使得电机内部电磁关系更加复杂,再加上磁路饱和及温度效应等非线性因素的影响,导致电机微分方程无法精确的建立。因此在研究永磁同步电机的数学模型时,通常作如下假设:
(1)三相绕组完全对称,磁动势沿气隙圆周按正弦分布;
(2)忽略磁路饱和影响,各绕组自感和互感均为线性;
(3)忽略铁心损耗;
(4)不考虑温度和频率变化对电机电阻的影响。
为简化数学模型,对三相坐标系下的数学方程进行clark变换后,得到表贴式永磁同步电机α-β坐标下的数学模型。
3 永磁同步电机矢量控制
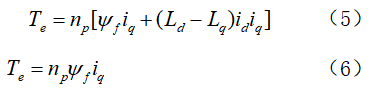
矢量控制(Vector Control)通过对转子磁场的定向,把定子电流分成励磁电流![]() 量和转矩电流分量两部分,同时分别进行控制,使交流电机具有媲美直流电机的调速性能。永磁同步电机矢量控制的控制主要方案有:(1)
量和转矩电流分量两部分,同时分别进行控制,使交流电机具有媲美直流电机的调速性能。永磁同步电机矢量控制的控制主要方案有:(1)![]() =0控制;(2)最大转矩/电流比控制;(3)恒磁通控制。(4)功率因数等于1控制。其中表贴式永磁同步电机常用
=0控制;(2)最大转矩/电流比控制;(3)恒磁通控制。(4)功率因数等于1控制。其中表贴式永磁同步电机常用![]() = 0控制,即电流产生的电流全部用于转矩输出,具有结构简单、控制效率高的优点。式(5)为d-q坐标系下的电磁转矩方程,当=0时,不考虑电机运行中永磁体磁链的变化,电磁转矩仅与
= 0控制,即电流产生的电流全部用于转矩输出,具有结构简单、控制效率高的优点。式(5)为d-q坐标系下的电磁转矩方程,当=0时,不考虑电机运行中永磁体磁链的变化,电磁转矩仅与![]() 正相关。通过控制
正相关。通过控制![]() 即可控制电机转矩输出。
即可控制电机转矩输出。
4 滑模观测器
滑模变结构控制本质上属于非线性控制,通过在不同控制间的切换,使系统状态变量按照预定的“滑动模态”轨迹运行,并达到动态稳定状态。滑模控制的优点是动态响应快、鲁棒性强、自适应等。缺点是稳定后系统在滑模面频繁切换,存在“抖震”现象。滑模面![]() 的设计原则要满足两个条件:(1)有限时间内可到达滑模面;(2)可在滑模面产生滑模运动。上述两个条件可等效为:
的设计原则要满足两个条件:(1)有限时间内可到达滑模面;(2)可在滑模面产生滑模运动。上述两个条件可等效为:
![]() (7)
(7)
根据电机稳态方程可以看出电机反电势含有转子位置和转速信息,通过反电势相位可得到转子位置,通过反电势幅值可得到转速信息,于是可通构建反电势滑模观测器来提取转子位置和转速。首先建立静止坐标系下的电流状态方程:
![]()

5 Matlab/Simulink仿真
为验证基于滑模无速度传感器技术矢量控制的正确性与可行性,搭建了如图1所示基于 的仿真模型。仿真选用某国产品牌永磁同步电机,电机参数如表1所示。
的仿真模型。仿真选用某国产品牌永磁同步电机,电机参数如表1所示。
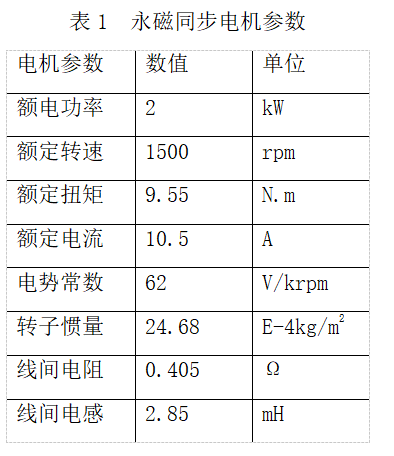
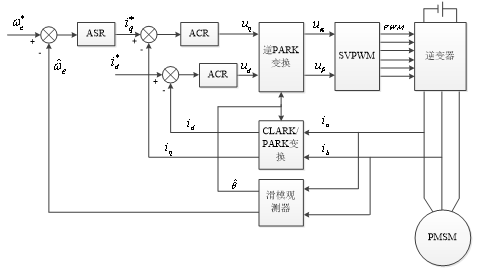
图1 基于滑模无速度传感器的PMSM矢量控制
由于观测器基于电流误差构造,当电机零速启动时,电机定子电流初始值为0,观测器失效。为了得到较好的观测效果,本文采用零速开环启动方式,启动10ms后,切换至环测器闭环控制。仿真中速度指令从1000rpm开始,0.25s后速度指令跌落至500rpm,0.5s后指令阶跃至1500rpm。
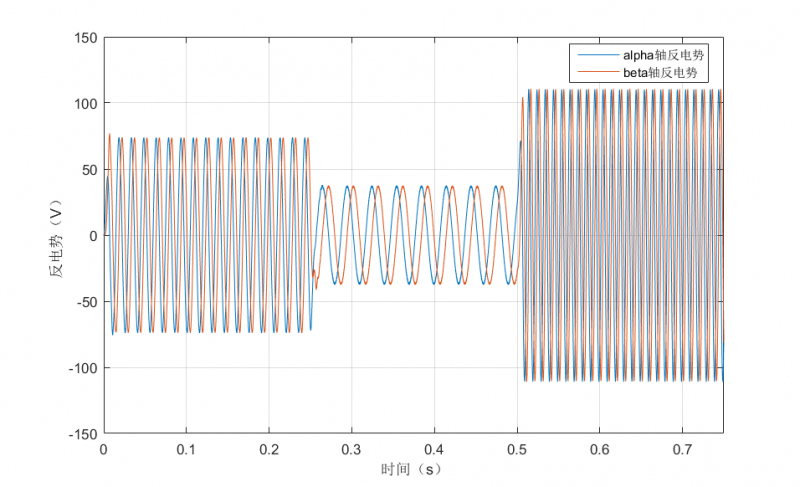
图2 滑模观测器滤波后的![]() 轴反电势波形
轴反电势波形
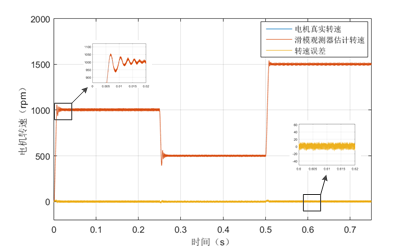
图3 实际速度与观测速度对比波形
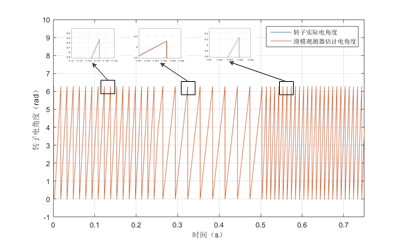
图4 电机转子实际位置和观测位置波形
如图3、图4所示,根据对滑模观测器观测出的电机反电势提取出的转速和转子位置信息精确性很高,动态响应较快。转速观测误差不超过±10rpm,同时转子观测误差随转速升高,误差变大,1500rpm时观测器提取的转子位置信息滞后约0.0002s,与低通滤波器的截止频率相吻合。
6 结语
本文基于滑模观测器推导出转子位置和转速信息,并运用于PMSM矢量控制系统中,该方案取消了位置传感器,避免了安装使用与维护带来的诸多不便,并通过Matlab仿真结果验证了该方案的有效性。但是在滑模观测器领域还有众多难点问题有待进一步研究和验证,例如PMSM电机初始位置识别、电机零速启动以及低通滤波器带来的延迟补偿等问题。
参考文献:
[1] 王成元, 夏加宽, 杨俊友. 电机现代控制技术[M]. 2006.
[2] 刘军. 永磁电动机控制系统若干问题的研究[D]. 华东理工大学, 2010.
[3] 胡蓉. 基于滑模观测器的永磁同步电机矢量控制研究[D]. 西南交通大学, 2014.
[4] 齐亮. 基于滑模变结构方法的永磁同步电机控制问题研究及应用[D]. 华东理工大学.
[5] 侯利民. 永磁同步电机传动系统的几类非线性控制策略研究及其调速系统的实现[D]. 东北大学, 2010.
[6] Shi D. Sensorless control method of PMSM based on slide-mode observer[C]// IEEE Symposium on Electrical & Electronics Engineering. IEEE, 2012
[7] Abbondanti A, Brennen M B. Variable Speed Induction Motor Drives Use Electronic Slip Calculator Based on Motor Voltage and Current[J]. IEEE Transactions on Industry Applications, 1975, IA(5):483-488.
[8] Joetten, Robert, Maeder, Gerhard. Control Methods for Good Dynamic Performance Induction Motor Drives Based on Current and Voltage as Measured Quantities[J]. IEEE Transactions on Industry Applications, IA-19(3):356-363.
[9] 张恒. 基于DSP滑模控制的PMSM伺服系统的设计[D]. 湖南大学, 2010.






共0条 [查看全部] 网友评论