



关键词:CPAC;OtoStudio;电机协同控制;可视化界面
Abstract: Based on the OtoStudio software development platform and CPAC hardware development platform of robot development platform, the research on motor collaborative control is carried out in this paper. Using two servo motors to control the motion in X direction and Y direction jointly, the control program is designed to realize that the terminal motion trajectory of the two motors is completed cooperatively into triangular wave trajectory and sinusoidal wave trajectory, and the real-time terminal motion trajectory is displayed through the visual interface.
Key words: CPAC; OtoStudio; Motor cooperative control; Visible interface
1 引言
近年来,随着现代工业和商业的快速发展,人们对工业生产所需的技术水平以及设备条件有了更高的要求,单台电机的驱动控制已经不能够满足工业发展的需求,工业现代化的发展将需要多台电机的联合驱动。多电机控制系统在印刷、造纸系统等工业生产领域均得到广泛的应用。因此,开展对电机协同控制系统的研究在工业领域的实际生产中具有很高的应用价值。
2 电机协同控制系统设计意义及发展现状
2.1 课题背景及研究意义
随着现代工商业的迅猛发展,以人工智能为代表的第四次工业革命深刻影响着我国制造业的发展[1]。在科学技术、智能制造不断发展的大背景下,工业机器人领域将会迎来高速的发展。伴随着“工业4.0”和“中国制造2025”等概念的提出[2],工业机器人技术快速发展,工业机器人技术的应用范围也在迅速地扩大[3]。仅利用单台电机的运行系统已经不能满足工业生产的需求,多台电机的协同控制系统正在融入工业生产的更多领域。随着生产技术的蓬勃发展,在越来越多的生产加工领域的工业自动化生产系统中,更多的运用到了由多个电机协同控制的系统,广泛地被应用到机器人控制、纺织、包装、印刷[4]等领域。因此,电机协同控制技术具有广阔的应用背景,在保证产品质量的同时,其在提升工作效率方面也有着较大的优势。
目前,在对多电机协同控制的研究方面,已经有很多的国内外学者取得了一定的成果。在本课题中,将基于机器人开发平台,针对目标轨迹进行实现,达到多电机控制系统的协同控制,进一步提高电机之间的协同控制性能。在由多台电机控制的系统中,对于多台电机的协同控制的研究具有很高的理论研究价值和实际应用意义。
2.2 国内外研究与发展现状
迄今为止,世界上已有许多国家对工业机器人技术进行了长时间的研究。世界上第一台工业机器人于1962年在美国研制成功。与其他国家相比,美国的机器人技术更加先进、全面,并且适应性也更强。目前,美国已经成为世界领先的机器人强国,大型的机器人企业有Adept Technology、American Robot、STRobotics等[5]。伴随着工业机器人的迅速发展[6],人们对工业领域产品质量要求的不断提高[7],对各种机械性能的要求逐渐提高,以及对产品需求量的增加,单台电机控制实现的效果已经不能够满足现在高科技迅速发展下人们的要求[8],使得多台电机的协同控制在工业生产制造中起到尤为突出的作用,其在实际的工程中得以运用,进一步保障了生产线的高质量与高效率的生产,为人们的生活带来极大的便利和更高的效益。多电机协同控制不仅能够提高系统的控制精度,还能够使系统具备更好的稳态性能,从而,多电机协同控制被频繁的应用于现代工业生产中,同时推动了国内外对电机协同控制的研究。
3 机器人开发平台中软硬件开发平台
3.1 硬件开发平台
机器人开发平台搭载有固高特有CPAC-计算机可编程自动化控制器RC800,它结合了计算机、运动控制、逻辑控制、现场网络和人机组态的工业装备控制的软硬件开发平台。系统由标准6R机器人控制器RC800、交流伺服驱动器、带绝对值编码交流伺服电机等组成。
3.2 软件开发平台OtoStudio
OtoStudio/GRT是CPAC的编程环境及运行引擎,具有定义架构内部程序构架的语言的顺序功能表和指令表、梯形图、功能图、结构文本等多种内部可控制的语言。OtoStudio是集运动控制标准功能模块、远程数据接口、可视化功能于一体的符合IEC61131-3国际标准的软件开发平台。
OtoStudio是用于控制系统应用程序的开发平台,它拥有完整控制编辑的调试软件包,其编程语言不仅便于运用,而且易于实现广泛的功能,不仅具有控制方案编辑器还有离线仿真调试器,便于达到各种控制方案的目的,在功能和结构上更加先进且易于掌握。
4 电机协同控制系统的建立
4.1 电机协同控制三角波及正弦波轨迹的实现
基于机器人开发平台进行程序编写,完成机器人开发平台中电机协同控制系统的设计。通过对X轴和Y轴两个轴的控制,使两台电机协同运动,实现在平面上得到的末端运动轨迹为三角波及正弦波轨迹,并通过建立可视化界面实时监测末端运动轨迹,程序运行结果以实时运动轨迹的形式显示在PC机的可视化界面和手持示教器的LED屏上。
电机协同控制三角波及正弦波轨迹程序设计中调用GTN_PrfPt,将X轴和Y轴两个轴运动模式均设置为动态PT模式,在PT模式下,速度曲线被分成无数段,利用多组位置、时间数据点来描述对速度的规划。上伺服,打开伺服使能的X轴和Y轴,启动X轴和Y轴两个轴为动态PT运动模式,并且将数据段设置为普通段PT_SEGMENT_NORMAL,因此,存储数据FIFO中首段的起点速度为零,在首段后开始,任意段的起点速度均等于前一段的终点速度。写入运动轨迹,包括每段所需时间、位置点、速度等数据,通过读取轴状态,包括规划速度,规划位置,编码器位置,向缓冲区压入数据,X轴和Y轴两个轴在动态PT运动模式下,控制器中的两个FIFO用来存储数据,其中一个FIFO中的数据使用完后将会自动清空,更换到第二个FIFO,因此能够向控制器继续发送新的数据。如果两个FIFO中的数据都被使用过之后将执行规划停止。在两个存储数据的FIFO数据用完之前,向控制器及时的发送新的数据,从而可以避免异常停止。为了查询控制X轴和Y轴方向的两台电机剩余的数据空间大小,在程序中通过调用GTN_PtSpace指令,执行目标轨迹X轴和Y轴运动数据运算,执行计算段内时间,计算段内位移等数据运算,实现末端运动轨迹为目标轨迹,待执行完成后,下伺服,关闭伺服使能的X轴和Y轴,这时两台电机将停止运动,位置清零。电机协同控制目标轨迹程序流程图,如附图所示。
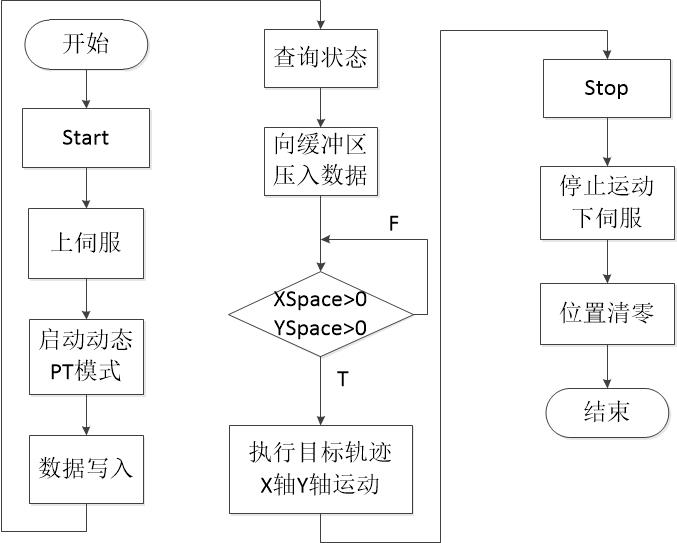
附图 电机协同控制目标轨迹程序流程图
4.2 电机协同控制实验分析
通过对两台电机协同控制完成末端运动轨迹为三角波及正弦波的联机运行,实现了通过对两台电机的控制使两台电机之间协同完成目标轨迹,由运行结果显示可以判断,两台电机能够较准确地协同配合完成在平面上末端运动轨迹为三角波轨迹及正弦波轨迹的运动,并且通过示教器LED屏上显示出实时检测到的实际末端运动轨迹,实现了电机协同控制的预期目标。
5 结语
本文主要研究以OtoStudio上位机软件及CPAC计算机可编程自动化控制器为软硬件开发平台,进行了电机协同控制轨迹的程序设计,采用两台电机分别控制X轴及Y轴方向的运动,使末端运动轨迹能够与目标轨迹达到一致,实现了电机的协同控制。目前在很多的生产加工领域,对多轴系统的需求不断增加,设计实现多电机的协同控制系统具有较高的实际应用意义。但本课题在电机的协同控制的研究上限于对两台电机的协同控制,因此,电机协同控制系统的功能可进一步完善,实现多电机的协同控制,以满足工业等领域的发展需求。
参考文献:
[1]邓呈昱. 机器人革命对制造型企业影响视角下我国社会保障探讨[J]. 商讯,2020(12):93-94.
[2]黄文军. 多伺服电机协同控制关键技术研究[D]. 上海:东华大学.2017.
[3]许阳. 基于CPAC的六自由度开放式机器人控制系统的开发[D]. 广州:广东工业大学.2013.
[4]蔡熙. 圆网数码壁纸印刷机套准同步控制研究[D]. 西安:西安工程大学.2019.
[5]肖凡. 基于CPAC的六自由度工业机器人控制系统设计与实现[D]. 株洲:湖南工业大学,2019.
[6]Fanuc Corporation. Patent Application Titled "Robot System And Robot Control Method For Cooperative Work With Human"[DB/OL]. Published Online (USPTO 20200122323).
Journal of Robotics & Machine Learning,2020.
[7]辛国建. 多电机速度协同控制策略研究[D]. 阜新:辽宁工程技术大学,2018.
[8]马闯,巫庆辉,侯元祥,蔡健哲. 多电机协同控制策略比较研究[J]. 渤海大学学报(自然科学版),2019,40(02):186-192.
项目基金:
天津技术创新引导专项优秀特派员项目(19JCTPJC41300),天津市教委科研计划项目(2019ZD23)
作者简介:
孙鹏 (1980-),男,天津市人,高级工程师,硕士,主要从事智能控制与检测研究工作






共0条 [查看全部] 网友评论