


关键词:旋转变压器;Analog Discovery 2;转子位置;数字转换器
Abstract: On the basis of explaining the working principle of the transformer, a new solution for the E-motor location decoding system is introduced, with the detailed design process and preferences. This solution is based on ADS2S1210 (revolving transformer/ digital converting IC produced by ADI), and lays great emphasis on the interface circuit of Analog Discovery 2, inspiring amplifier circuit and the interface to the TC1782.
Key words: Revolving transformer; Analog Discovery 2; Rotor position; Digital converter
1 引言
无刷电动机没有换向机构,需要位置传感器来确定转子位置、旋转速度等参数。其位置传感器原以霍尔传感器、光学编码器居多。但是由于霍尔传感器精度低,而光学编码器抗震动性差、抗腐蚀性弱,都不能胜任现代电动汽车恶劣的工作环境,故近年来迅速被适用于恶劣工作环境的旋转变压器所代替[1]。
旋转变压器作为时变强耦合器件,对其输入信号有较高的要求,且其输出模拟信号因相位移向、电机引入干扰而不能直接被上位控制机所采纳使用,必须采用设计良好、经过标定验证的信号接口电路处理,以实现其模拟信号与控制系统数字信号之间的互相转化。这类接口电路是专用于旋转变压器的模/数转换器,即旋转变压器/数字转换器(RDC)[2]。
早期的RDC电路方案采用分离式设计,使用者需根据各自系统的特点利用各种滤波、放大、AD/DA等芯片搭建一个完整的RDC电路,这种方案需要设计者拥有非常丰富的设计经验和大量的系统测试/验证时间,在一定程度上为旋转变压器的普及造成了障碍。AD2S1210是ADI公司最新推出的旋转变压器信号输出/检测芯片,该芯片分辨率为10bit、12bit、14bit、16bit可调,最大精度可达±2.5弧分,且带有参考振荡器的数字可变R/D变换器并经过了汽车应用认证。
2 旋变原理及主要参数指标
基本的旋转变压器分经典旋变和可变磁阻式旋变等,它们在结构和绕组分配方式上略有不同,但是无论何种形式的旋变,其旋变输出电压(S3-S1,S2-S4)的计算公式(1)均相同,即:
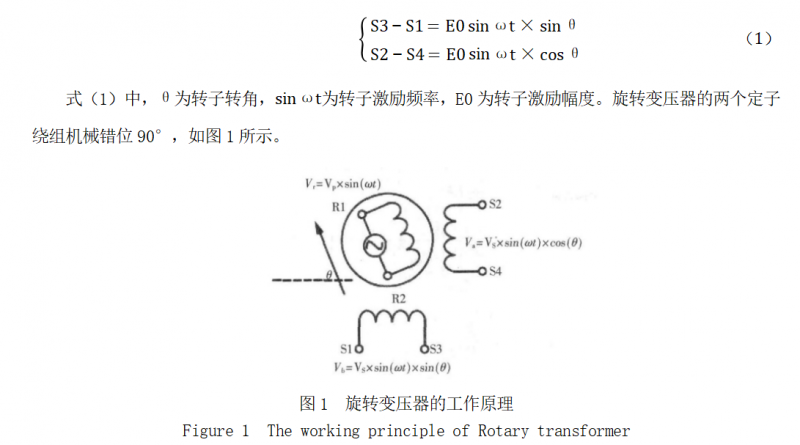
图1中,Vp为励磁电压峰值,Vr为励磁电压有效值,Vs为变比后的电压,Va、Vb分别为S2-S4、S3-S1感应电压。初级绕组采用交流基准源激励,随后在定子次级绕组上耦合的幅度是转子(轴)相对于定子位置的函数。因此,旋变产生由轴角的正弦和余弦调制的两个输出电压(S3-S1,S2-S4)。旋变信号输出格式如图2所示。
本设计的旋转变压器采用日本多摩川公司的经典旋变,其变比为0.286,激励频率范围为10kHz~20kHz,激励电压峰-峰值最大为17V,激励电流典型值为50mA。
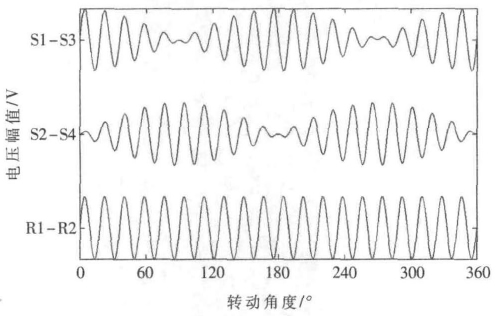
图2 输出格式表示图
3 AD2S1210工作理论及外围搭建
AD2S1210集成片上可编程正弦波振荡器,为旋转变压器提供正弦波激励,转换器的正弦和余弦输入端准许输入峰-峰值为3.15V±27%、频率为2kHz~20kHz范围内的信号。将正弦和余弦输入端的信号转换为输入角度和速度所对应的数字量信号,则最大跟踪速度为3125r/s。
3.1 工作理论
AD2S1210按照TypeⅡ跟踪闭环原理工作,能跟踪恒定速度输入,而输出连续跟踪旋变的位置不存在固有误差,无需外部转换和等待状态,抑制噪声效果好,并可以最大限度地抑制谐波失真,从而提高精度。当旋变的位置经过最低有效位的角度时,AD2S1210输出1LSB(1LSB=60′×360/2N,N为RDC分辨率)。
![]()
3.2 外围电路
AD2S1210外围电路如图3所示,采用模拟、数字双路隔离供电,激励频率为10kHz。

图3 AD2S1210外围电路
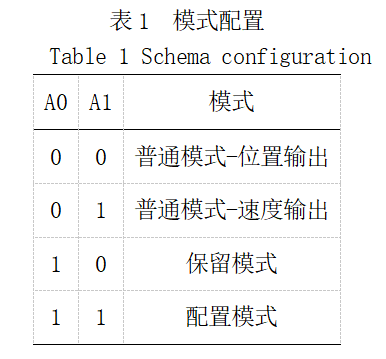
ADS1210有两种工作模式:配置模式和普通模式。配置模式用于对寄存器进行编程,以设置AD21210的激励频率、分辨率和故障检测阈值。配置模式也可用于回读故障寄存器中的信息以及位置和速度寄存器中的数据。AD2S1210可以完全工作在配置模式下,或者初始配置完成后离开配置模式工作在普通模式下。在普通模式下工作时,数据输出可提供角位置或角速度数据[3]。A0和A1输入用来确定AD2S1210是否处于配置模式以及是否将位置或速度数据提供给输出引脚。模式配置如表1所示。
在普通模式下,数字输出的分辨率利用RES0和RES1输入引脚进行选择。配置模式下,分辨率通过设置控制寄存器中的RES0和RES1位选择。切换普通模式与配置模式时,输入端必须确保控制寄存器中设置的分辨率与RES0和RSE1输入引脚所设置的分辨率一致。如果两种分辨率设置不同,则输出数据可能不正确[3]。在8.192MHz时钟下,其关系如表2所示。

由于旋变有着不同的励磁电压要求和一定的变比,而AD2S1210的励磁信号输出典型值为差分7.2Vp-p,输入信号范围为差分3.15Vp-p,故应结合旋变的参数调整驱动器的增益。需要注意的是输入至AD2S1210的差分信号不能低于地电位,所以在此处选择正电源激励。
一般情况增益都在励磁一侧的增益缓冲器处设定,根据旋变励磁电压和旋变的变比,可得到符合AD2S1210输入电平要求的正、余弦调制信号。励磁驱动电路如图4所示。
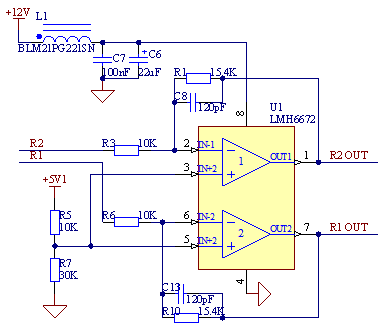
图4 励磁驱动电路
在本设计中,已知旋变的变比为0.286,为实现3.15Vp-p的正、余弦输入信号幅度,励磁一侧的电压应为:3.15Vp-p/0.286=11Vp-p,所以增益设定为:R142/R146=11Vp-p/7.2Vp-p=1.53。
运放同相输入端的电阻用于调整励磁信号的直流共模电平,C163、C173电容并联在反馈端用于滤波[4]。
AD2S1210的输入信号SIN(COS)与SINLO(COSLO)两者的典型压差是3.15Vp-p,输入的差分信号不能低于零电位,设计使用REFOUT来偏置输入差分信号,如图5所示。为了改善系统的噪声性能,必须对输入模拟信号进行RC滤波(其截止频率低于500kHz),并使用较短的双绞屏蔽线对模拟信号进行保护,屏蔽线端接至![]()
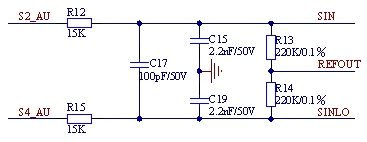
图5 差分输入信号接收电路
3.3 通信模式

图6 并行端口写入时序
4 结语
相对于传统的旋转变压器设计方案,该方案电路简单可靠,与英飞凌TC1782核心控制器、多摩川旋转变压器匹配良好,取得了非常好的实际应用效果。ADI公司的RDC芯片AD2S1210分辨率可变,支持10bit、12bit、14bit、16bitRD转换,内置参考振荡器,功能强大,体积小,适用范围广。
参考文献:
[1]曲家骐,王季秩.伺服控制系统中的传感器[M].北京:机械工业出版社,1999.
[2]白洪亮,张鹏,温昕,等. 基于Analog Discovery 2的巨磁阻效应实验系统[J]. 物理实验,2019-09-20:110-114.
[3]李耀海,胡广艳,郝瑞祥,等. 基于AU6802n1的旋转变压器信号接口电路的设计和应用[J].电子设计应用,2006(2):110-114.
[4]Analog Devices Ins.. AD2S1210 datasheet[Z].2008.
[5]李川,谭娃,金如麟. 电机控制专用DSP讲座[J].微特电机,2001,29(4):43-45,47.
[6]熊光亮. AD2S82A在交流伺服控制中的应用[J]. 电光系统,2004(2):61-64.
[7]崔军,温旭辉,张立伟. 新型永磁同步电机控制用旋转变压器/数字转换器及其应用[J].电机与控制应用,2005,32(8):51-54.
通讯作者:
王珏




共0条 [查看全部] 网友评论