



关键词:机器人;增强型单片机;自动避障
1 引言
现如今机器人技术越来越完善,自动避障已经成为机器人不可缺少的基础功能之一。在移动的同时能够避开障碍是机器人研究的重要分支之一,这对于机器人产业的发展具有巨大的益处,同时对工业自动化的发展有很大的推进作用。
本文使用增强型MCS-51单片机STC89C52为核心来控制LSC-32路舵机控制板,以此驱动4个数字舵机完成所有的动作。由超声波传感器对前进方向上的大型障碍物进行测距,到达一定阈值时设定机器人先向右转弯,再判定这个方向上近距离有没有新的障碍物,如果没有则沿新方向道路上行走,反之,则继续右转重新进行上述步骤。
2 系统方案设计
本设计由控制系统和硬件电路组成,采用4个数字舵机组成机器人行走关节。如图1所示,1号和2号舵机作为髋关节,3号4号舵机作为踝关节。分别接入32路舵机控制板的1号,29号,2号,30号接口。超声波模块连接在单片机上,由单片机控制舵机控制板。
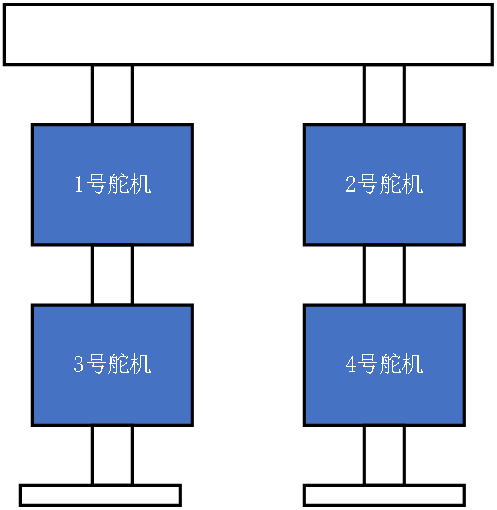
图1 竞步机器人舵机分配图
本设计采用的是当竞步机器人在前进过程中碰到障碍物时,设定机器人改变方向,向右转后保持现有方向继续前进。选用超声波模块是因为如果遇到的障碍物是透明的,例如透明玻璃,也可以实现避障,而且精度较高,成本较低。
3 系统硬件与实现
控制系统的硬件模块共分为单片机控制模块、舵机控制模块和超声波模块。如图2所示。
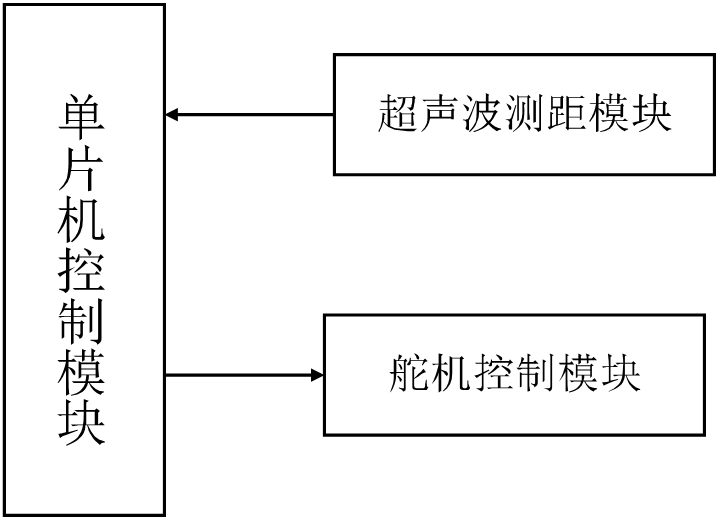
图2 硬件控制图
3.1 控制器电路模块设计
控制器模块电路采用STC89C52单片机、外围复位电路和晶振电路组成,构成单片机最小系统。如图3所示。
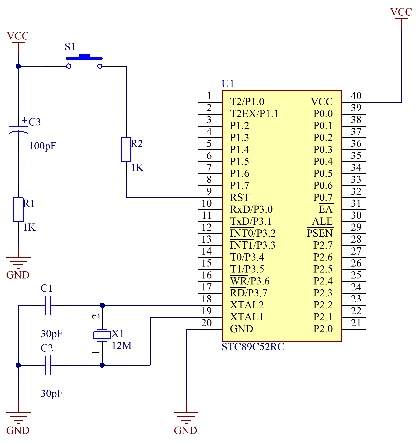
图3 控制器模块电路图
3.2 舵机控制模块电路设计
本设计采用LD-1501MG数字舵机,反应速度块,定位精度高。它由单片机发出的脉冲信号控制。当脉冲宽度发生改变时,舵机输出轴角度发生改变。舵机模块如图4所示。
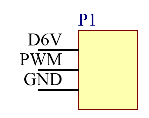
图4 舵机模块接口图
3.3 超声波测距模块设计
本设计采用HY-SRF05超声波测距模块,可以提供20cm-450cm的非接触式测距功能,模块包括超声波发射器、接收器和控制电路。
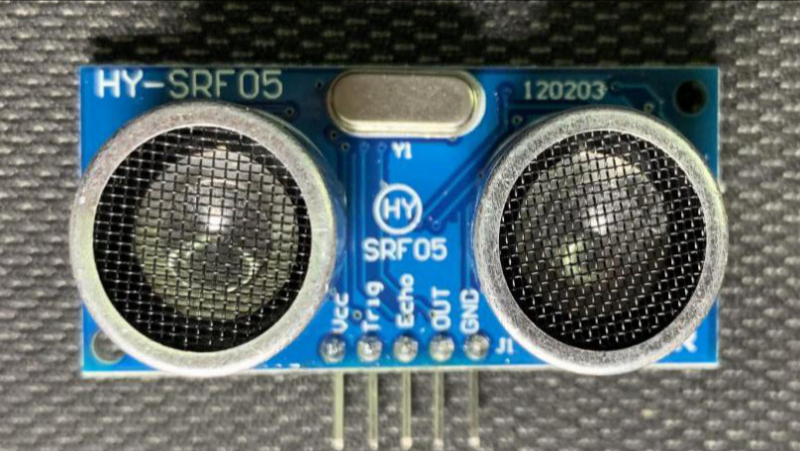
图5 超声波模块图
引脚定义:
VCC 供+5V电源
GND 接地
TRIG 触发控制,信号输入
ECHO 回响信号输出
OUT 开关输出量
4 系统软件设计
在本设计中,要实现4个舵机的控制,首先要实现单个舵机的控制。单个舵机控制程序如下:
void Time0_Int() interrupt 1
{
TH0 = 0xfe; //重新赋值
TL0 = 0x33;
if(count<jd) //判断0.5ms次数是否小于角度标识
PWM=1; //确实小于,PWM输出高电平
else
PWM=0; //大于则输出低电平
count=(count+1); //0.5ms次数加1
count=count%40; //次数始终保持为40 即保持周期为20ms
}
5 系统测试
5.1 前进测试
竞步机器人做出前进动作,如图6所示。

图6 机器人前进图
5.2 转弯测试
竞步机器人遇到障碍物时调整方向,如图7所示。
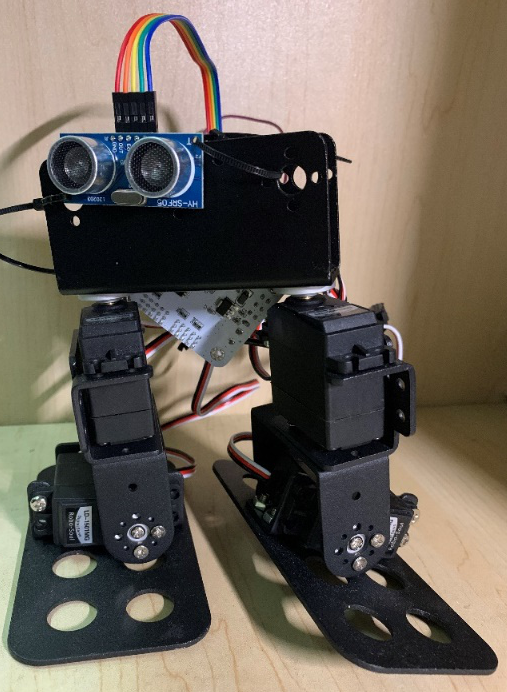
图7 机器人转弯图
6 结束语
利用单片机和舵机控制板的二次开发,可以更精准的实现舵机的控制,也可以实现更有趣的功能,例如接入MP3模块或者蓝牙模块等。本设计方案只是运用实现了超声波避障,其他功能并未加入。其控制系统包括单片机控制模块,超声波模块和舵机控制模块。通过软件系统对其进行控制,并且进行相应的测试完成前进和避障的动作。
参考文献:
[1]姚永平. STC89C52RC系列单片机扩展RAM和P4口的应用[J]. 单片机与嵌入式系统应用, 2005(8):2.
[2]郭清. 基于STC89C52的超声波测距防撞系统设计[J]. 仪表技术与传感器, 2011(6):74-77.
[3]李同岭, 李清君. 超声波测距[J]. 煤炭技术, 2012, 31(7):55-56.
[4]时德钢, 刘晔, 王峰,等. 超声波测距仪的研究[J]. 计算机测量与控制, 2002, 10(7):480-482.
[5] 双足竞步机器人控制系统的研究与设计[D]. 江西理工大学, 2013.
[6] 叶孝璐, 俞立, 陈军统. 基于ATmega88和Delphi的双足竞步机器人设计[J] 微型机与应用, 2014(23):38-40.
[7]任玲, 汪倩倩, 金濯,等. 双足竞步机器人设计[J]. 电子技术, 2016(10).
[8]梁锋, 王志良, 解仑,等. 多舵机控制在类人机器人上的应用[J]. 微计算机信息, 2008, 24(2):242-243.
[9]吴华波, 钱春来. 基于AT89C2051的多路舵机控制器设计[J]. 单片机与嵌入式系统应用, 2006(8):55-58.
[10]佚名. 智能避障机器人:, CN106041879A[P]. 2016.
[11]耶晓东. 简易避障机器人的设计[J]. 仪器仪表用户, 2009, 16(1):52-54.
[12]王立鹏. 基于AT89S51单片机的智能避障机器人设计[J]. 电子技术与软件工程, 2014(23):259-259.
[13]杨乐. 机器人超声波避障的探究[J]. 科学技术创新, 2010(11):4-4.
[14]李恒, 徐小力, 左云波. 移动机器人超声波测距避障系统设计[J]. 现代电子技术, 2014(3):157-159.
[15]王栋. 基于多超声波测距与模糊控制的移动机器人自主避障[D]. 中国海洋大学, 2008.
作者简介:
蒋善超:电话:18351280820;地址:江苏省盐城市亭湖区希望大道中路1号






共0条 [查看全部] 网友评论