


关键词:直流伺服系统;TPS40060;电机PID
Abstract: In order to improve the fast-dynamic performance of the DC brush servo control system, this paper proposes a new method based on the design of the TPS40060 DC servo control system. The system uses TPS40060 voltage synchronization controller as the current loop, and STM32 single-chip microcomputer is designed to design digital position closed loop and speed closed loop to form a position, speed, and current three closed loop DC servo system to meet the performance requirements of the fast-dynamic performance response control system.
Key words: DC servo system; TPS40060; Motor PID
1 直流电机调速控制原理
直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续旋转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。
直流电机的转速计算公式如下:n=(U-IR)/Kφ,其中n为电机转速,U为电枢电压,I为电枢电流,R为电枢电路总电阻,φ为励磁磁通,K为电动机结构决定的电势参数。由公式可以看出,调节电动机的转速有三种方法:(1)调节电枢电压U;(2)减弱励磁磁通φ;(3)改变电枢电路总电阻R;对于要求在一定范围内无级平滑调试的系统来说,调节电枢供电电压的方式为最好。改变电阻只能实现有级调速;减弱磁通虽然能够平滑调速,但调速范围不大,往往只是配合调压方案,在额定转速以上作小范围的弱磁升速[1]。因此,直流电机调速控制系统通常以调压调速为主。
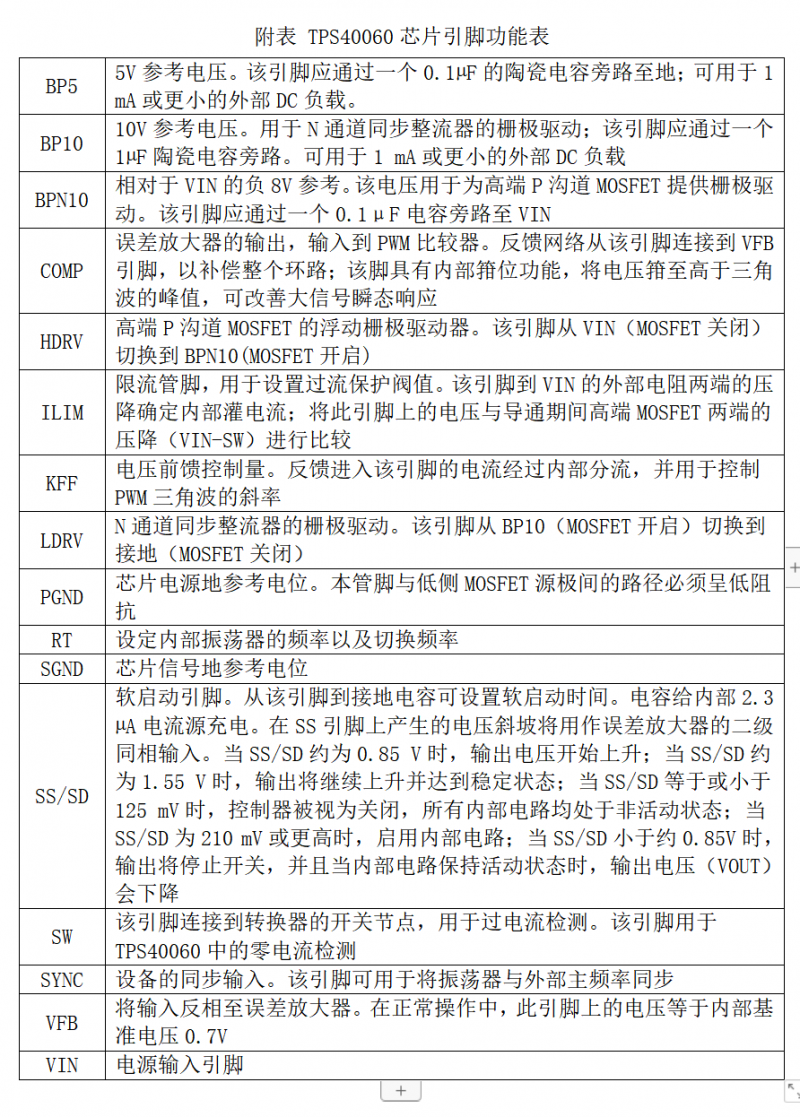
2 TPS40060的工作原理
TPS40060是TI公司的一款宽电压同步降压控制器产品,该器件是一种具有宽输入电压范围(10V-55V)的高电压同步降压控制器,最大输出电流10A。同时该器件提供了多种可设计功能,包括软启动、欠压锁定、频率调节、电压前馈、主功率管电流限制和环路补偿等。
TPS40060内部还包含外部PMOSFET和NMOSFET驱动整流器;门驱动逻辑包含反交叉导通电路,防止同时导通高端P MOSFET和低端N MOSFET,烧坏MOSFET和TPS40060器件。芯片详细内部框图在参考文献[2]中给出,在此主要介绍各引脚见附表所示。
3 硬件电路设计
TPS40060直流电机伺服控制系统如图1所示。该系统由单片机控制单元、电压驱动控制模块、TPS40060电压转换模块、电机驱动模块和电机编码器组件模块构成。单片机输出PWM波控制信号、电机方向控制和编码器信号采集;电压驱动控制模块把PWM波信号转换为电压信号与电机驱动模块电流采用信号进行比较,输出VFB电压控制量;TPS40060电压转换模块,根据VFB控制信号,控制电机驱动模块电压大小;电机驱动模块对电机电流进行采用、电机方向控制和电压转速控制;电机编码器组件模块编码信号反馈用于速度闭环控制。
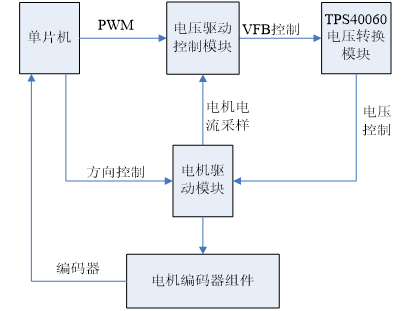
图1 TPS40060直流电机伺服控制系统框图
3.1 TPS40060电压转换模块
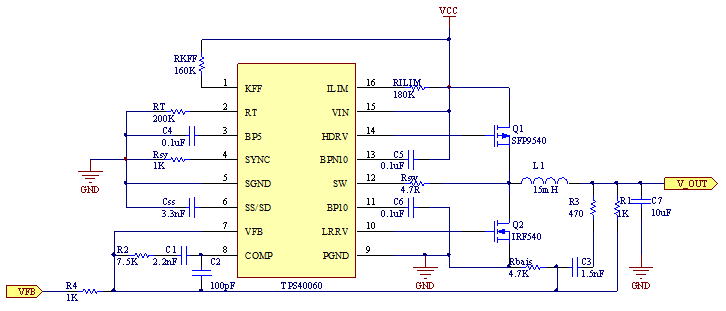
图2 TPS40060电源控制电路图
3.2 电压控制模块
电压控制模块电路见图3所示。单片机PWM波形信号经过一个电压跟随器网络,具有电源隔离和提高负载驱动作用;后级通过电机电流采样分压和比例微分电路控制TPS40060电压转换模块。
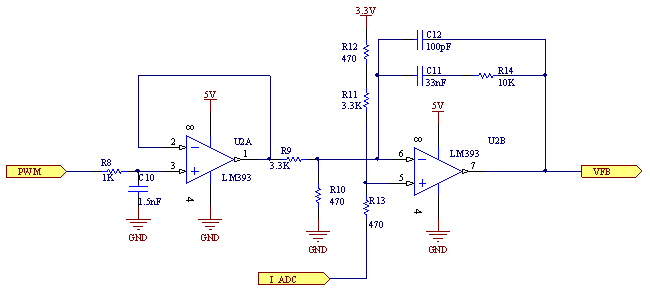
图3 电压控制电路图
3.3 电机驱动电路控制电路
单片机通过控制DIR1和DIR2控制电机正反转,DIR1和DIR2不能同时打开,否则烧驱动电路,电源VOUT输出电压控制电机转速快慢,I_ADC电机电阻采样,反馈到电压控制电路,形成硬件电流闭环反馈,D1、D2稳压二极管,维持MOSFET栅极电压稳定。
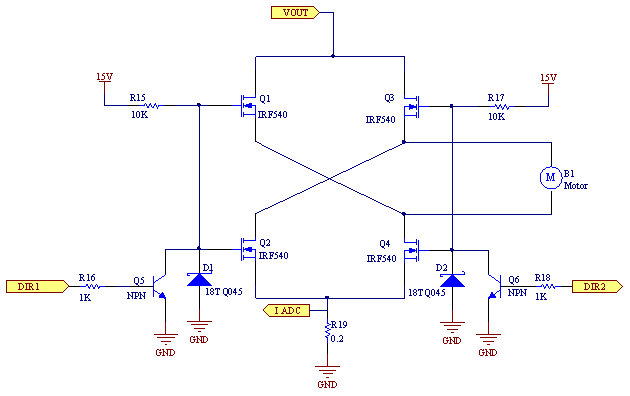
图4 电机驱动电路
4 软件系统设计
系统软件主要包括主程序和中断服务程序,主程序如图5所示,首先初始化单片机系统时钟、系统状态寄存器、PWM定时器、设置I/O端口、ADC采样等;然后初始化系统参数,PID参数、欠压、过压阈值设定、电机轴转一圈脉冲数等参数设置;再通过死循环,不断检测是否有外部方向控制信号,电流过流信号、ADC采样电压信号是否超过设定阈值。
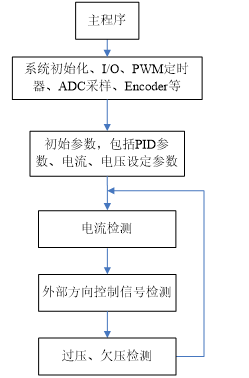
图5 系统软件主程序
中断服务程序如图6所示,主要包括位置PID调节及限幅和速度PI调节及限幅,并输出PWM波控制电机。
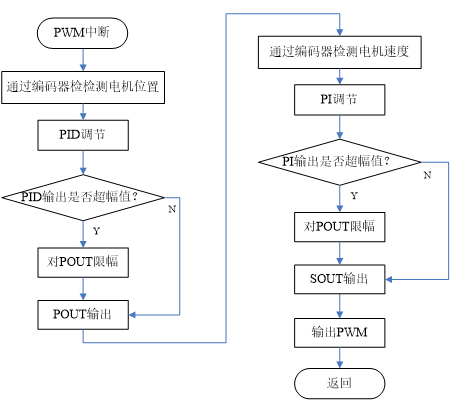
图6 PWM中断子程序
STM32单片机提供的编码器接口模式主要针对的就是“正交编码器”,它可以利用定时器的“计数”功能,得出编码器计了多少个脉冲;同时,它可以根据编码器AB的相位得出编码器是正转,还是反转[3]。如图7所示。
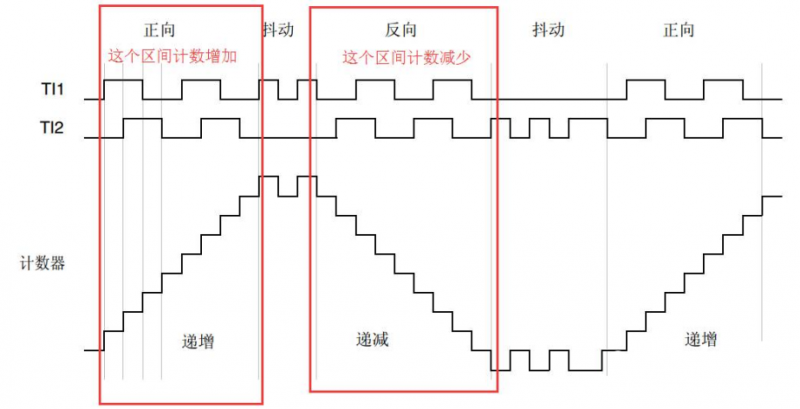
图7 编码器获取编码器信号
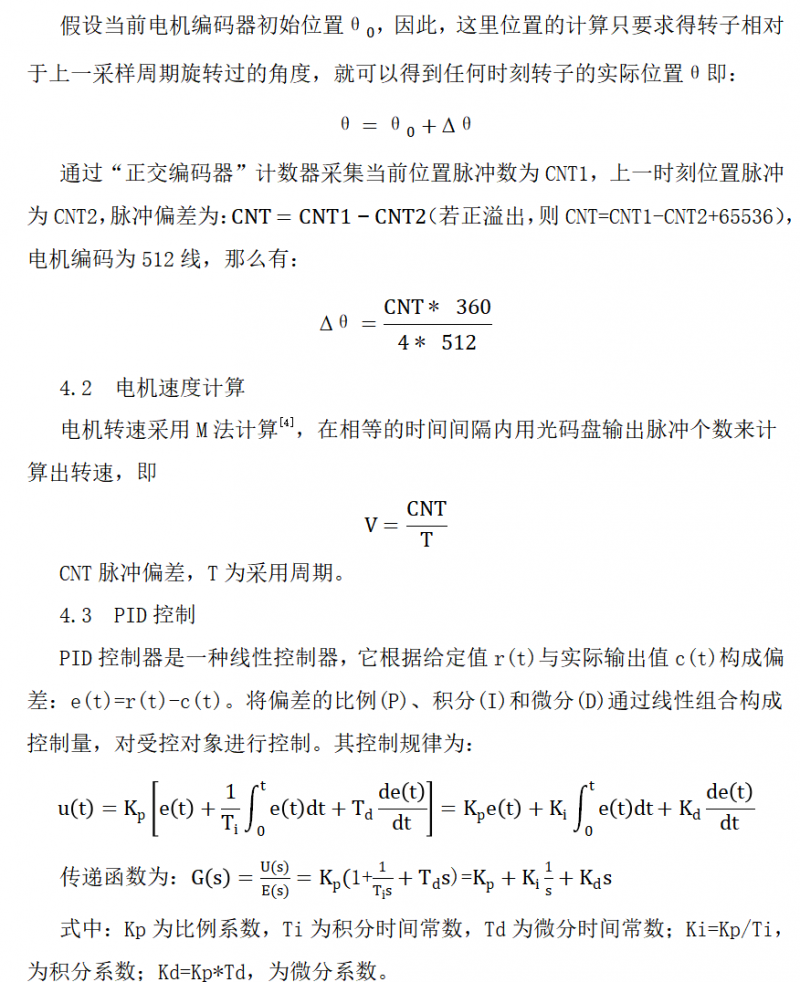
4.1 电机位置计算
5 结束语
基于TPS40060直流伺服控制系统,采用TPS40060电压同步降压控制器作为电机电流环,降低STM32单片机速度要求,提升电流环闭环调节速率,提升整个直流伺服系统快速响应性能;同时,TPS40060是Ti公司成熟产品,可以提高产品稳定性和缩短开发周期。
参考文献:
[1]陈伯时.电力拖动自动控制系统——运动控制系统(第3版)[M]. 机械工业出版社,2005
[2]TPS40060 Wide Input Synchronous Buck Controller[R]. USA: TexasInstruments Incorporated,2013
[3]STM32 Reference Manual (RM0008)[M].STMicroelectronics,2014
[4]王少君,刘永强,杨邵普,聊英英,郝高岩. 基于光电编码器的测速方法研究及实验验证[J].自动化与仪表,2015.6
作者简介:
陈著明,单位:中国航空技术深圳有限公司




共0条 [查看全部] 网友评论