



关键词:运动控制;工业机器人;高级语言
Absrtact: as one of the four major families of industrial robots, ABB is the most prominent in motion control and algorithm. Its Raoid language, as a high-level language, also contains many functions. This paper studies the application of offs function in robot studio.
Key words: Motion control; Industrial robot; Advanced language
1 offs函数
1.1 offs函数介绍
offs函数用于在一个机械臂位置的工件坐标系中添加一个偏移量。
Offs (Point ,XOffset ,YOffset ,ZOffset)
Point 数据类型: robtarget,有待移动的位置数据。
XOffset 数据类型:num工件坐标系中x方向的位移。
YOffset 数据类型:num,工件坐标系中y方向的位移。
ZOffset 数据类型:num ,工件坐标系中z方向的位移。
1.2 实例
例1
MoveL Offs(p2, 0, 0, 10), v1000, z50, tool1;
将机械臂移动至距位置p2(沿z方向)10 mm的一个点。
例2
p1 := Offs (p1, 5, 10, 15);
机械臂位置p1沿x方向移动5 mm,沿y方向移动10 mm,且沿z方向移动15 mm。
2 工作站系统的搭建
2.1 新建一个空工作站
新建一个空工作站,如图1所示为创建空工作站。
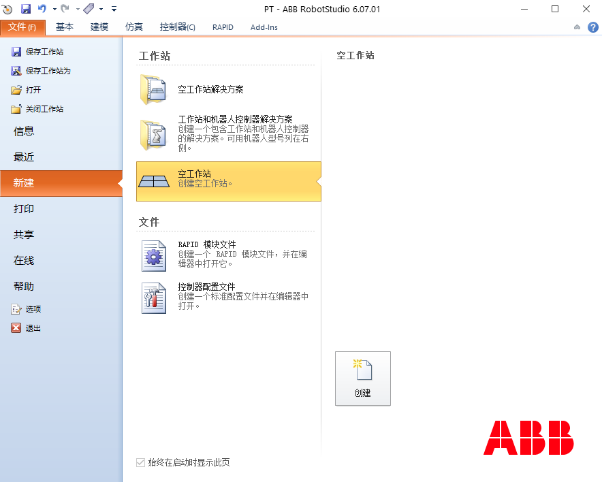
图1 创建空工作站图
1.2 创建工作站系统
添加机器人,并从布局创建系统,如图2所示为工作站布局图。
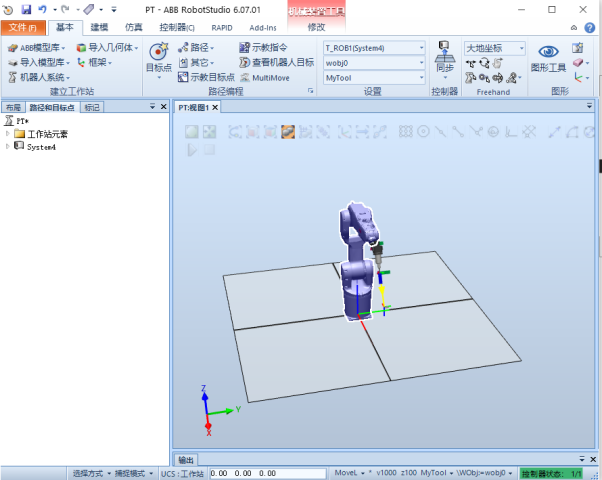
图2 工作站布局图
1.3 安装机器人工具
添加设备中的My Tool工具,并安装至机器人法兰处,如图3所示为工具安装示意图。
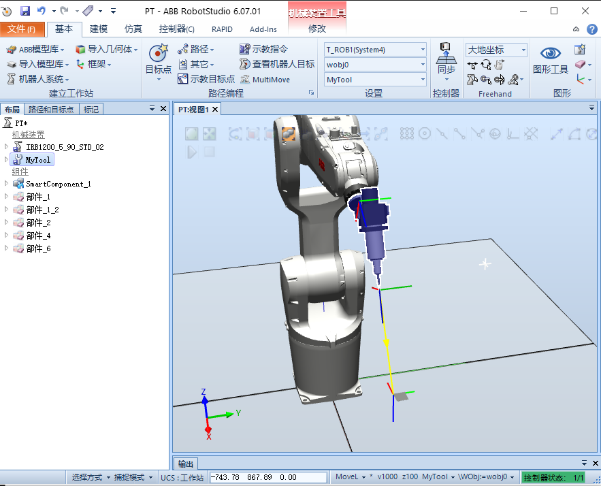
图3 工具安装示意图
1.4 添加Smart组件
在建模工作栏选择TCP跟踪组件,如图4所示为Smart组件创建图。
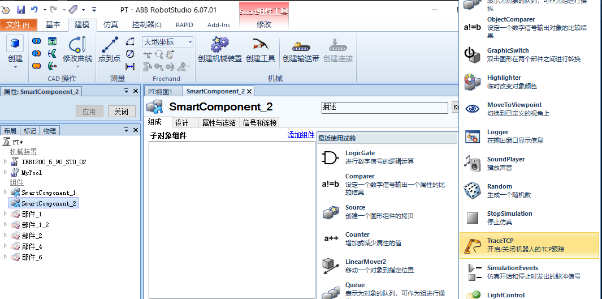
图4 Smart组件创建图
1.5 创建工作站逻辑
在仿真工作栏选择工作站逻辑,并在系统中创建相关的信号,如图5所示为工作站逻辑示意图。
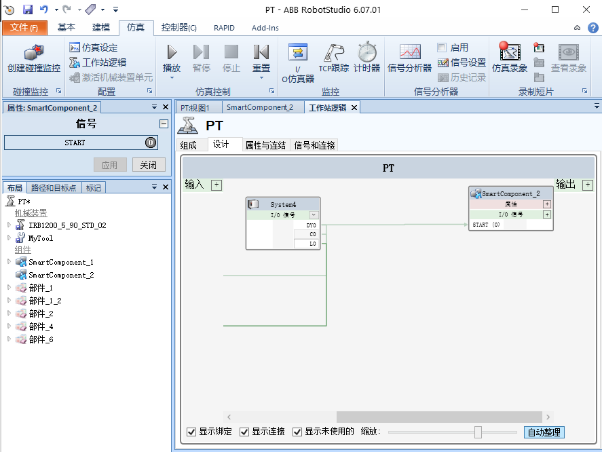
图5 工作站逻辑示意图
2 程序
![]()
2.1 任务场景
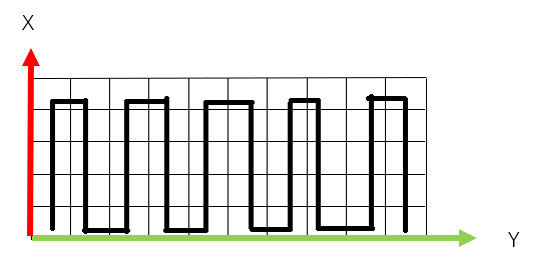
图6 任务场景图
机器人工具从P1点开始运动,以S型路线运动,每个小矩形的长宽为1。
2.2 程序编写
先给机器人设置Home点,在设置一个开始点P1。
首先机器人在开始点的程序为:MOVEL OFFS(P1,0,0,0).
运动至X=5,Y=0处时程序为:MOVEL OFFS(P1,5,0,0).
运动至X=5,Y=0处时程序为:MOVEL OFFS(P1,5,1,0).
运动至X=0,Y=1处时程序为:MOVEL OFFS(P1,0,1,0).
这样就形成了一个小循环,那么只需将这个小循环循环5次就可。
详细代码:
MoveLP_10,v1000,FINE,MyTool\WObj:=wobj0;
moveloffs(Target_20,0.5,0.5,a),v1000,fine,MyTool\WObj:=wobj0;
FOR x FROM 0 TO 28 step 2 DO
moveloffs(Target_20,0.5,0.5+x,a),V80,Z0,MyTool\WObj:=wobj0;
moveloffs(Target_20,29.5,0.5+x,a),V80,FINE,MyTool\WObj:=wobj0;
moveloffs(Target_20,29.5,1.5+x,a),V80,Z0,MyTool\WObj:=wobj0;
moveloffs(Target_20,0.5,1.5+x,a),V80,FINE,MyTool\WObj:=wobj0;
ENDFOR P_10,v1000,FINE,MyTool\WObj:=wobj0;
ENDPROC
2.3 运行仿真
点击仿真选项卡,点击仿真,就可以看见机器人沿着运行轨迹生成矩形体,模仿S型路径最终生成一个大的矩形体,如图7仿真运行图所示。
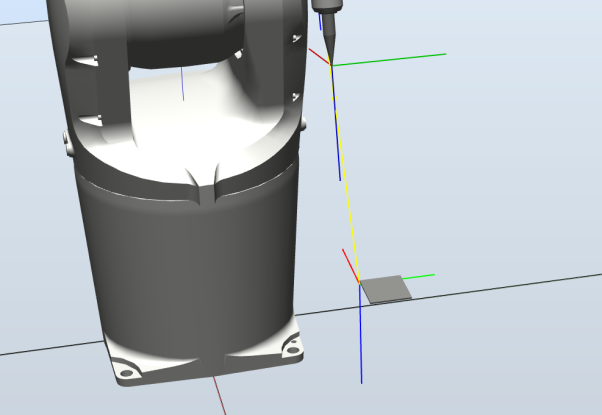
图7 仿真运行图
参考文献:
[1]田亚娟. 基于IRB460机器人智能码垛工作站设计及仿真[J]. 2020(02)
[2]张宁菊. 基于ABB机器人的I/O模块与信号配置[J]. 2020(01)
[3]张洪森. ABB工业机器人码垛实现[J]. 2019(12)
[4] 谭芳. ABB IRB120型工业机器人编程及搬运实例[J]. 2019(02)
[5] 杨江领. 工业机器人四大家族的前世今生[J]. 2019(01)
作者简介:
杨江领(1997-),男,汉族,重庆集成天智机器人有限公司,机器人工程师,研究方向:工业机器人应用






共0条 [查看全部] 网友评论