



关键词:救援爆破车;无线网络;多功能救援车;智能
Abstract: According to the requirement of dehumanization and visualization of the rescue and blasting vehicle, an optimization scheme is proposed to solve the problems of the current rescue and blasting vehicle with single function, complex system design and weak endurance. Based on the unified network platform, an intelligent vehicle with multiple functions, such as detection and detonation, provision of drug assistance, video detection and photographing of hazardous area and on-site environment detection, is designed.
Key words: Rescue and Blasting Vehicle; Wireless Network; Intelligent Multi-functional Rescue Vehicle
1 引言
救援爆破多功能智能车是一种能够代替人类进行危险物品排除工作的机械车辆或机器人。中国在这方面的研究起步相对较晚,“智能蝴蝶”系列爆破车由中国科学院沈阳自动化研究所研制,重量达200kg,最大运动速度可达2.40km/h,还可以下40°以下的斜坡或楼梯,具有完美的三段履带设计,使机器人能顺利地爬上或下楼梯,并能克服高达400mm的障碍。广州威孚机器人公司生产的 PST系列机动车具有很好的移动性能,可以跨越400mm高的障碍物,还可以挖掘500mm宽的沟槽,而且也可以在40°的角度下斜坡或楼梯。它不仅能前后移动,还能以最大30m/min的速度转弯。
目前,各种救援爆破车辆仍然存在功能单一、系统设计复杂、耐久性差等问题。现有的大多数救援爆破车只能完成引爆任务,而不考虑向被困人员或伤员提供药品和医疗救助,也不可能有效探测救援爆破环境。基于高效、实用的原则,文中设计了一种多功能爆破智能车,它能够完成救援和起爆任务,检测物体周围环境,并且降低了成本。
2 总体方案设计
车辆可以将检测到的图片以无线WIFI连接的形式实时上传到控制端,供指挥员作出相应的决定,指挥员还可以通过无线WIFI连接对智能车及其网络摄像头进行实时遥控操作①。该系统将无线传感器网络的智能监控系统组成一个自组织网络,将智能车辆的各种参数及时传输到控制端。
2.1 各部分结构组成
多功能爆破智能车由智能车身和遥控上位机两部分组成。车身又由图1所示的控制系统、移动载体、机载设备和机械臂等5个模块组成。
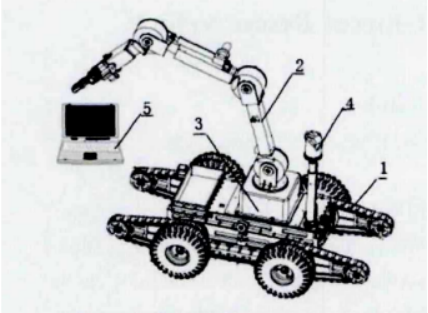
(1-移动载体 2-机械臂 3-控制系统 4-机载设备 5-上位机)
图1 多功能爆破智能车结构组成
在设计车身时,必须考虑到与处理可疑危险物质的具体要求有关的许多技术参数,将每个装配件科学地布置在整机的对应位置,使重量分配科学化,便于使用和维护。为了更科学地分配救援爆破车的轴向载荷和重心,在设计过程中应使整机装配和部件的布置垂直对称,使整机保持水平稳定,左右两侧载荷均匀。
2.2 功能模块组合
根据对车体结构和功能的要求,多功能爆破智能车的移动载体除了包括驱动系统、传感定位系统、通信系统、供电系统等部分外,还包括行走、行驶、防护、支撑等其它机械结构部分。智能车的控制项目主要是远程控制,辅以独立控制,包括操作平台、无线网络等部分。
3 总体功能模块设计
3.1 移动载体的功能设计
救援爆破车的移动载体由动力源、电液控制系统和行走机构等部分组成,配备了许多零部件和电气元件,在一定程度上支撑着整个机器的重量,当整机运行正常或操作正常时,也会承受很大的动载荷作用②。在救援和排除爆炸过程中,为了保证移动载体上各系统的准确运行,有必要对移动载体机器人的设计进行完善。行走机构可以由多种传动结构组成,常用的结构有履带式、轮式或者两者结合的形式。在对各种方案进行比较后,综合考虑了救援车辆的移动载体、应用场所和工程炸弹处置,最终决定以履带车辆为主要移动载体。
3.2 机械臂的功能设计
机械臂是救援车辆的主要部件,也是评价救援车辆性能的主要指标,机械臂通常用于消除危险、火灾和破坏。彩色CCD摄影机经常用于救援和爆破车辆,以密切检查可疑物体。机械臂可用来抓取爆炸物、金属探测器及其他设备,以完全侦测可疑物体,或处理爆炸物。机械臂的长度约为0.5米,具有“6+1”自由度、灵活性高和适应性强的优点,可与相应的控制系统完全匹配,使操作人员操作更加灵活、方便,并且确保任务顺利完成③。
机械臂由六部分组成:手爪,手腕,前臂,中臂,大臂和腰部(又称为基座),和“6+1”自由度。在这些组成部分之间,还包括腰部转动、大臂、中臂、小臂和手腕的投掷、手爪的旋转和张开。通过减速器,电机可以直接驱动腰部旋转、中臂、前臂和腕部节距。由于大臂承载能力有限,存在许多安全隐患,采用大臂电机通过减速器驱动推杆来驱动大臂变距。同时它还具有一定的自锁能力和稳定的结构。手爪部分比较特殊,在手爪的旋转和张开运动之间需要有一定的耦合。要实现手爪运动的旋转,必须在手爪电机运动过程中保证手爪开闭电机按照规定的速比运动,最大限度地实现回转。相反,手爪开闭也不会影响机械臂的旋转。
3.3 控制系统设计
考虑到救援爆破车工作环境的复杂性和危险性,可以采用统一的无线通信方式,提高其对环境的适应性。系统中的所有子系统设备都是通过接收机的通信子系统发送的,以避免模块之间的电磁干扰,提高抗干扰性能。由于减少了自干扰,所以通信距离更长,并有效地降低了能量消耗。多功能爆破智能车的控制系统按照功能划分和模块组成分为三部分:后控台(上位机)、救援爆破车车体(下位机)和通信子系统,控制系统结构框图如图2所示。
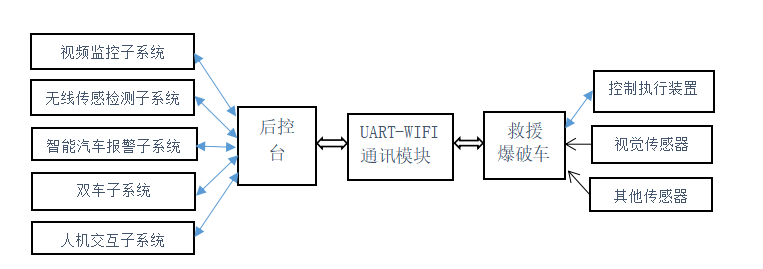
图2 控制系统结构框图
3.3.1 上位机
上位机按功能可分为五个子系统,即视频监控子系统、无线传感检测子系统、智能汽车报警子系统、双车子系统和人机交互子系统。其中,人机交互子系统是操作者与上位机之间的主要人机界面,操作者可以使用鼠标、按钮、键盘和操纵杆等多种输入设备对智能汽车进行远程控制操作。同时,它在软件界面上会显示其他四个子系统传输的视频、音频、环境、工作状态、地理位置等信息,为指挥员提供决策指令。报警子系统通常由报警指示灯和蜂鸣器组成。 双车交互子系统主要用于处理紧急情况,这两辆车可以放置在不同的视角,并配备辅助武器装备,以覆盖和支持对方。
3.3.2 车身控制与传感系统
(1)控制执行装置
救援爆破车本身是下位机,包括所有安装在移动运输车上的设备。考虑到智能设备众多,需要大量的I/O端口和模拟端口,并在 RS-485总线的基础上建立了一个管理系统,以确保信号的及时处理。上位机采用PC104四轴控制器作为主站,下位机则采用手臂控制器控制移动载体和机械设备。根据控制功能,下位机可分为四个子系统,即现场视频监控子系统、控制执行子系统、工作状态子系统和无线传感器监控子系统④。
除了机械手和移动载体外,安装在车上的设备还有传感器监控系统和应急医疗箱。所有这些机载设备都位于智能车的后平台上,其位置的摆放不会影响智能车的自动操作。
(2)视觉传感装置
视觉传感器装置采用网络摄像机,可以通过网络实现图像的远程传输。设备中所使用的摄像头支持h.264编码,可以满足最大1080p 30FPS的传输。视频处理电路具有自动增益控制、背光补偿等功能。通过POE网络可以简单方便的将它连接到通信子系统。未来可以根据需要更换红外摄像机。
(3)其他传感器装置
其他传感器设备由位于智能车内的多个传感器节点组成,包括传感器、电源管理、数据处理和传输模块四个主要部分。传感器模块的主要任务是采集监测区域的信息以及实现数据转换,采集的信息包括光强、声音、大气压力等。电源管理模块反映节点当前的电能消耗和电源状态。数据处理模块的主要任务是控制整个节点的同步位置、处理操作、任务和电源管理。数据传输模块的主要任务是与其他节点进行无线通信,交换控制信息,收集数据。所有传感器数据由通信子系统统一处理后发送至上位机。
3.3.3 通讯子系统
通信子系统用于连接后控制台与救援引爆装置。该系统采用hyperion电子公司的UART-WIFI模块,该模块同时具有DART接口和在线接入,WIFI网络标准嵌入式模块,内置无线IEEE802.11网络协议栈,可实现用户数据到无线网络的转换。其中,虚拟串行端口功能完全支持串行透明数据传输模式,真正实现串行端口即插即用,具有完整的TCP/IP协议栈,动态IP地址分配支持DHCP(动态主机配置协议)和DNS域名解析能力,串行传输速度高达KBPS。通过UART-WIFI单片机串行口,它可以方便地将各种传统控制设备连接到无线网络。由于采用模块化设计,只需将每个模块的引脚与引脚连接即可,网络接口设备可以直接实现人机交互,以实现未来的功能扩展。
4 结论
文中设计的智能救援防爆系统可以最大限度地降低电磁干扰,并通过统一的无线网络通信子系统对其功能进行扩展。通过IP协议整合其他子系统的各种信息,使软件运行更加稳定可靠,使硬件设计更加简单节能,达到了实用高效的设计目的。
参考文献:
[1]李宣辰.一种智能城市应急救援车的设计[J]. 环球市场信息导报,2016(41): 106-106.
[2]李政清,王健. 多功能智能搜救小车的设计[J]. 山西电子技术,2016(4): 20-22.
[3]葛汝明,张福安,倪建华,等.智能救援车系统的设计与实现[J]. 德州学院学报,2009,25(4):18-20.
[4]孙玉轩.智能检测车的设计[J].襄阳职业技术学院学报,2012,11(2):28-30.
[5]周景磊.基于单片机的智能救援机器人小车设计[J]. 电子技术,2011,38(8):47-47.
作者简介:
刘静,1983年10月,女,陕西西安,现任重庆科创职业学院骨干教师,副教授,联系电话:13594334525;邮箱:2103771@ qq.com;地址:重庆永川区重庆科创职业学院智能制造学院,刘静(收);邮编:402160。






共0条 [查看全部] 网友评论