


关键词:家居服务机器人;非结构化环境;物体感知
1 引言
伴随着计算机技术的快速发展和人工智能水平的不断提高,机器人发展突飞猛进,在功能和技术层面均有了显著性提高。家居服务机器人是在家居非结构化环境下可以为人类提供有益服务的高智能化装备[1],目前,已经成为世界各国的研究热点,具有强大的生命力。通过分析家居服务机器人在物体感知中遇到的各种问题,结合机器人物体感知的准确性、鲁棒性与快速性要求,论文整体可分为三大部分:首先,基于SURF(Speeded Up Robust Features)特征设计了一套完整的家居服务机器人物体识别系统;随后,为了进一步提高系统性能,提出了一种基于显著性区域指导的机器人物体识别算法;最后,在连续的视频流中,引入视频跟踪的局部搜索机制。并对传统Camshift(Continuously Adaptive Meanshift)算法进行改进,提出来一种结合SURF特征的无监督的Camshift物体跟踪算法。通过以上研究,家居服务机器人可以在变化的视频序列中,实时地找到目标物体并且获知目标物体在二维图像中的具体位置[2]。
2 目标识别算法
目标识别旨在通过数字图像处理等技术在图像或视频中寻找指定物体,准确而快速的目标识别是家居服务机器人完成物体抓取等一系列复杂任务的前提。目前,常见的目标识别算法主要可以分为两类:基于模板匹配的目标识别和基于机器学习的目标识别。基于模板匹配的方法的主要思想是已知先验物体模式,根据相似度度量规则在另一幅图像中寻找对应模式。基于机器学习的方法则需要通过统计学知识来训练分类器[3]。
基于特征的匹配方法首先需要提取图像特征,经常用到的特征是角点特征。由于基于特征的匹配并不是对所有像素点都进行运算,所有可以在很大程度上提高算法匹配效率。基于特征的匹配方法一般首先对输入的图像进行去噪、平滑、滤波等预处理来提高图像的质量,之后提取合适的特征,最后选择合理的相似性度量方法来进行匹配。其主要流程图如图1所示。

图1 基于特征的模板匹配流程图
3 目标跟踪算法
目标跟踪的根本任务是从视频序列中获取目标的真实位置。视频目标跟踪技术在机器人等诸多领域有着广泛应用,产生了许多目标跟踪算法。不同的目标跟踪算法会有一些差距,但是一般情况下主要包括以下四个环节:运动预测、特征提取、特征匹配以及模板更新,如图2所示。
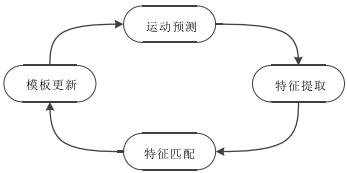
图2 目标跟踪步骤图
以上四个环节彼此依赖,彼此配合,在整个目标跟踪过程中循环往复执行。
(1)运动预测
运动预测是指预测在下一帧图像中的目标位置,预测模型多种多样,既包括匀速平移运动,也包括复杂的曲线运动。通过运动预测,可以有效减少搜索范围,缩小特征匹配区域,使特征的匹配更加有针对性,提高跟踪效率。依据时间域上的帧间相关性,众多学者提出许多不同的运动预测工具。运动预测的核心思想是通过分析之前视频中目标的运动轨迹,获取运动参数,用以预测目标在下一帧图像中位置[4]。
(2)特征提取
特征提取就是在目标区域获取图像特征值,使目标具有可度量性质的度量值函数,从而可以描述目标,进行后续分析计算。在进行特征提取时,有两个关键问题需要解决,一是选择什么样的特征,二是怎样准确计算这些特征。在目标跟踪过程中,不同特征对目标的描述能力不同,同一种特征在不同场景中对目标的描述能力会发生相应变化,因此,必须依据目标本身特征和目标所处环境来选择合适的图像特征[5]。
(3)特征匹配
特征匹配是将目标模板特征与当前帧搜索区域特征进行匹配,获得的最优匹配区域即为目标在当前帧的位置。
(4)模板更新
在理想状态下,视频序列中目标其外观、运动状态会保持不变。因此,只需用固定模板进行匹配即可。但是,在实际应用中,目标的形状、运动状态都会发生变化,会造成原始模板与当前目标差异很大,因此需要及时进行模板更新。
4 基于局部SURF特征的机器人物体识别算法
SURF算法是在SIFT算法的基础上发展而来的,它不仅继承了SIFT算法的平移、缩放、亮度、旋转不变性等优点,并且速度有很大提升,是SIFT算法效率的三倍。因此,本文选择SURF特征作为物体识别的关键特征,采用改进的特征点匹配方法,设计了家居服务机器人的物体识别方案。基于SURF特征的物体识别流程如图3所示。首先提取模板图像与场景图像的SURF特征,主要包括极值点检测、关键点精确定位、特征描述三个步骤,在生成特征集合后,首先进行特征初步匹配,为了消除误匹配,采用随机抽样一致性算法进行匹配提纯,得到识别结果[6]。
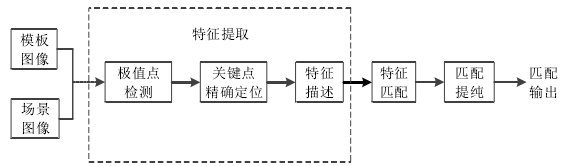
图3 基于SURF特征的物体识别流程图
5 结语
本文从家居服务机器人的实际应用出发,设计并实现了基于视觉的家居服务机器人的物体感知系统,采用鲁棒性SURF特征作为物体识别的关键特征,基于改进的特征点匹配方法设计了一套完整的家居服务机器人物体识别系统。为进一步提高机器人物体识别效率,利用视觉选择性注意机制,提出基于显著性区域指导的物体识别方法。首先基于背景先验获得显著性区域,之后仅仅在显著性区域提取不变性SURF特征,最后通过特征的匹配实现物体识别。由于过滤掉大量背景区域,使算法速度得以提升,算法识别率得到提高。在真实室内环境下基于家居服务机器人平台进行实验,将改进算法与已有算法进行比较,证明了本文算法的优越性。
参考文献:
[1]胡克方. 基于互联网技术家居智能控制的设计与实现[D]. 天津大学,2015.
[2]肖起. 面向智能家居的物联网隐私保护方法研究与实现[D]. 北京工业大学,2017.
[3]邵静,高隽,赵莹,张旭东. 一种基于图像固有维度的感知物体检测方法[J]. 仪器仪表学报,2008(04):810-815.
[4]张凯. 基于视觉感知模型的虚拟人路径规划研究[D]. 河北工业大学,2011.
[5]王韬. 基于移动机器人的环境智能感知技术研究[D]. 中国工程物理研究院,2014.
[6]张菊莉,马钟,贺占庄,周革强,何双亮. 视觉感知启发的面向出舱活动的物体识别技术研究[J]. 载人航天,2018,24(01):41-47.
作者简介:潘光良(1994.10-),男,工学硕士,齐鲁工业大学(山东省科学院)电气工程与自动化学院,研究方向:工业测控网络技术。




共0条 [查看全部] 网友评论