


关键词:变电站;巡检机器人;电磁寻迹;卷积神经网络
Abstract: As the core link of the smart grid, the intelligent substation has attracted much attention, and the development of universal inspection robots has become the driving force for the intellectualization of substations. In this paper, a general-purpose embedded system is used to build the power system. At the same time, the high-definition camera and infrared light-sensing components are used to realize image acquisition. The motion control algorithm and visual algorithm are designed, and the inspection robot prototype is developed. The indoor cruise experiment and climbing are carried out. The stability experiment verified the stability of the operation of each sensor module and human-computer interaction interface. Experiments show that the robot designed in this paper can meet the basic operational requirements and lay a solid theoretical and practical foundation for the development of popular inspection robots.
Keywords: Substation; Inspection robot; Electromagnetic navigation; Convolutional neural networks
1 引言
各行各业中,电力产业对人们的生产生活起着至关重要的作用。其中变电站是电力输送和电能分配中的重要环节,不仅控制着电流和电压的大小、方向,还承担着将电能分配到千家万户的重任[1]。随着变电站规模的不断扩大,巡检的项目和难度越来越大,采用传统人工巡检的方式,工作效率容易受到巡检人员主观经验和技术水平的限制,同时巡检人员长期工作于这样的环境下,会造成神经疲劳、精神衰弱、精神抑郁,增加中枢神经系统疾病、心脏病、心血管等疾病的患病概率的升高。因此,普及巡检机器人在变电站的应用,来代替巡视人员实现变电站的巡视检查,不但可节省开支,也是保障巡检工作者身体健康的现实所需[2,3]。
早在很多年前国内外的科学家们就已经开展对变电站巡检机器人的研究。2000年加拿大科学家研制了一款轮式机器人,搭载了红外热成像仪和高清摄像头,可以实现远程操控[4];2012年梅西大学和新西兰电网公司联合研制了一款搭载超声波传感器防碰撞结构且能进行高清视频和图像回传到工作后台的巡检机器人,可以实现变电站整个地形的全面巡检[5,6]。同时,近年来国内变电站巡检机器人的研究也在如火如荼的进行。例如2015年深圳市朗驰欣创科技股份有限公司研制出一款可以自主导航定位、自主巡航、自主充电的机器人,搭载了红外热成像和高清摄像头设备,能够实现识别设备仪表的实时参数,发现电流、电压过高导致的过热以及其他故障[7];2017年,中国亿嘉和科技有限公司推出了一款采用全自动激光定位与导航、全驱全动、可以感知到障碍物并轻松越过障碍物的全新机器人[8,9]。
通过以上的分析可知,变电站巡检机器人相比于人工巡检具有一定的优势,但是研制机器人的成本比较昂贵,并不能在各个变电站实现普及性投放。因此,本文基于山西省重点研发计划(高新领域)项目(201803D121123)研制了一款较廉价的功能样机,通过实验室实验表明,本文设计的机器人可以满足基本的运行要求。
2 巡检机器人总体方案设计
2.1 巡检机器人系统组成
目前,巡检机器人系统组成大致分为移动和视频采集两个方面,采用的为多层结构设计,主要由控制中心、数据传输和机器人终端这三个部分组成。控制中心类似于机器人的中枢,主要是采用计算机进行软件编程,完成对机器人的总体控制;数据传输则相当于机器人的神经系统,主要是连接控制中心与机器人终端的沟通桥梁作用,主要功能是将机器人采集到的各种信息(如拍摄的图像、采集的温度、油压等)传输到控制中心[10]。同时,控制中心发出的指令也可通过其传递给机器人执行;机器人终端是机器人的核心组成,主要包括机器人的动力驱动、各类传感器模块和控制模块等。如图1所示为巡视检查机器人的总体系统结构图。
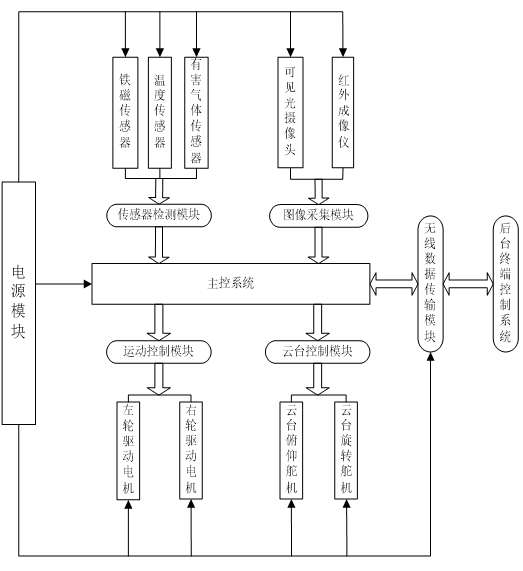
图1 巡检机器人的系统结构图
2.2 巡检机器人整体结构设计
本文设计的巡检机器人主要包括机械结构模块、运动控制模块、视频采集模块、传感器模块和通讯模块。机械结构模块主要包括轮式底盘、整体的机身外壳结构设计;运动控制模块主要是以STM32为核心的控制系统;视频采集模块包括可见光摄像头和温度传感器,将设备信息采集后通过无线传输到工作后台;传感器模块主要包括铁磁传感器LDC1000和可燃气体传感器MQ-2,从而实现自动寻迹和监测可燃气体浓度;通讯模块是实现后台和机器人之间的通讯,包括指令的发送和信息的传输。
3 巡检机器人硬件结构设计
3.1 机器人机械结构设计
在本文中,采用有机玻璃作为巡检机器人的机身外壳材料,外壳厚度大约为3mm,制作过程中严格按照工艺标准流程进行,防护等级具体可以严格的达到IP54以上。
绘图软件,绘制机器人整体的二维机械结构图,如图2所示。同时,采用Solidworks软件针对机器人的整体结构3D模型建模,如图3所示。
(a)机器人正视图 (b)机器人左视图 (c)机器人俯视图
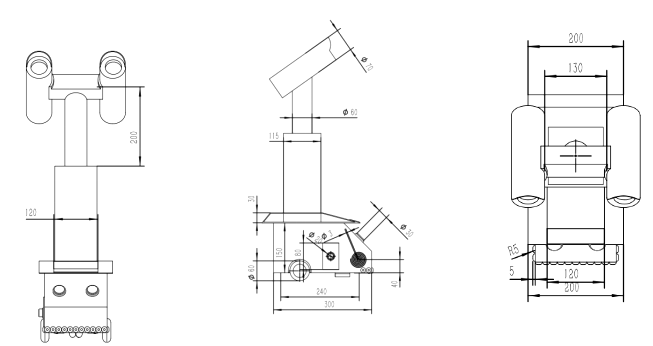
图2 巡检机器人二维机械结构图
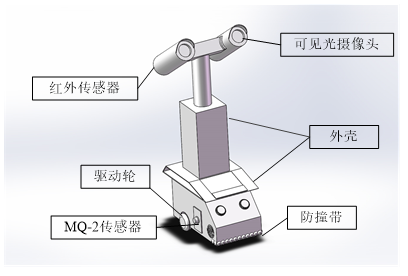
图3 巡检机器人整体三维模型图
3.2 巡检机器人主控单元
意法半导体公司生产的STM32F103系列芯片采用的是具有较高性能的 32位的RISC内核,其一般的工作频率是七十二兆赫兹;STM32属于微控制器。它具有多个供通讯使用的模块,如USART、I2C、SPI等,还可以同时连接多个用于传感的设备,以至于可以同时操控多台不同的仪器。片内搭载高速存储器(512K字节的闪存和64K字节SRAM),外部电源2.0-3.6V极大地提高了I/O接口与两APB在外的设备,STM32F103的最小系统如图4所示。

图4 STM32F103的最小系统
3.3 巡检机器人的供电模块
电源模块是整个机器人各个部分的动力来源部分,是机器人的重要组成部分。本文中电源的供电电压为DC12V,故而采用12V 3200mAh Ni-cd 蓄电池作为动力来源。但是电机驱动控制器和主控制芯片在运行时工作电压分别需要5V和3.3V的低电压,所以需要将12V的电压进行转换,其转换的原理图如图5所示。
图5 12V转换为5V和3.3V的原理图
4 巡检机器人系统软件设计
近年来,由于变电站中继电器的损坏率较高,导致运行成本增加,故而可以通过巡检机器人在变电站及时的对各类继电器进行巡检,通过红外测温判断继电器触头间是否出现过热现象,从而及时的提醒工作人员进行现场勘查,防止继电器由于长时间温度过高出现损坏。但是,虽然机器人能将检测到的过热继电器数据传送到终端后台,但是工作人员无法判断到底是哪个接触器触头发生了过热现象。
基于此,我们准备使用人工手写数字对其编号,并将每个编号表示的具体信息存档后台系统中。应用一种深度前馈神经网络——卷积神经网络来识别出数字的编号[11],通过与后台存档的数字进行匹配,从而判断出具体故障的继电器,及时的采取预防措施,降低运行成本,以免造成严重的事故。
4.1 搭建的卷积神经网络结构
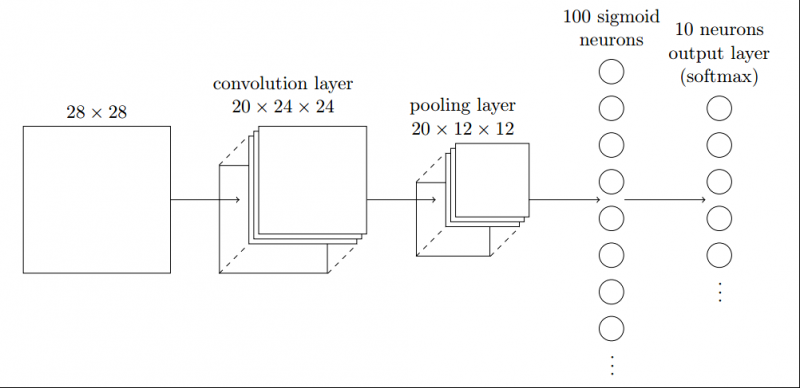
图6 卷积神经网络的结构图
本文中卷积神经网络的训练数据库为国际上流行的Mnist数据集库[12],该库共包括70000张图片,其中有60000张训练图和10000张测试图片,如图7为Mnist部分数据集。
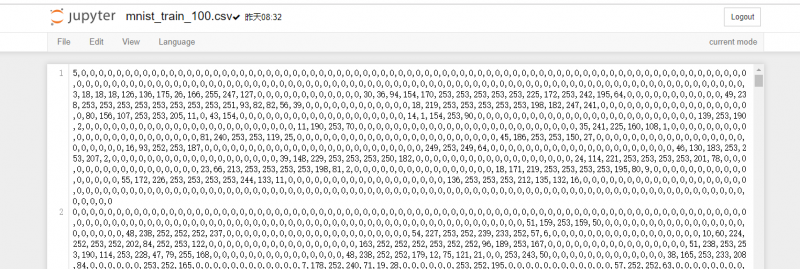
图7 MNIST部分数据集
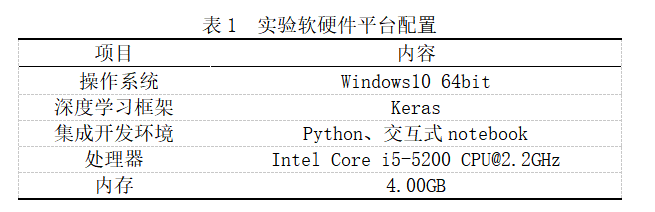
4.2 实验软硬件平台配置
实验软硬件平台配置如表1所示。
4.3 实验结果分析与对比
为了测试本文搭建的卷积神经网络的性能,使用本文提出的卷积神经网络和传统的神经网络进行仿真实验对比。传统的神经网络模型为经典的三层网络,包含一个输入层、一个隐含层和一个输出层,激活函数采用的为Sigmoid函数。其中输入层有784个神经元,隐含层有300个神经元,输出层有10个神经元,如图8为实验结果图。
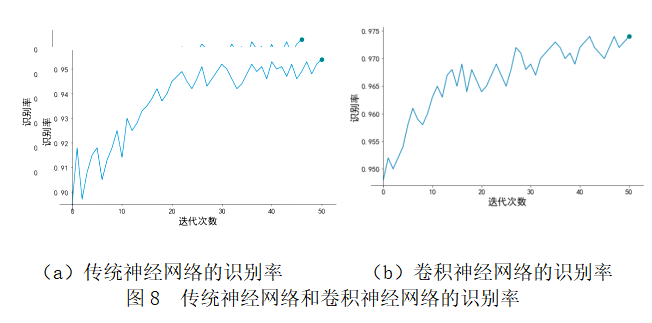
在实验过程中,运用截断正态分布的方法来初始化网络的各项参数后,在迭代大约50次后对网络的性能进行测试。由图8可以看出,传统的神经网络在迭代50步左右后识别率可达到0.954左右,而卷积神经网络在同样迭代步数识别率可达到0.974左右。两种方法具体的正确率结果如表2所示。

5 安装与测试
5.1 巡检机器人的安装
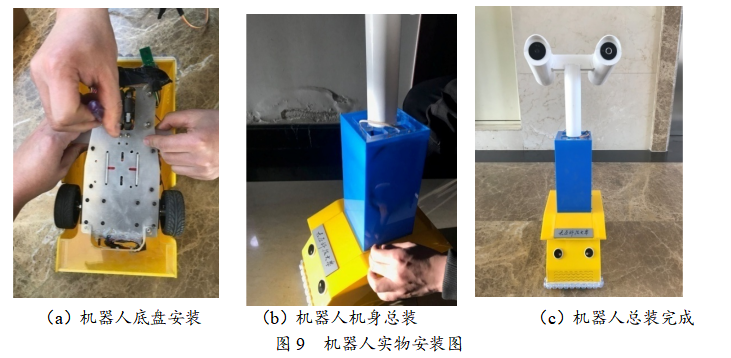
根据设计的机械结构,将机器人的底盘、控制系统、摄像头、各类传感器设备和机器外壳都组装起来,安装完成的机器人如图9所示。
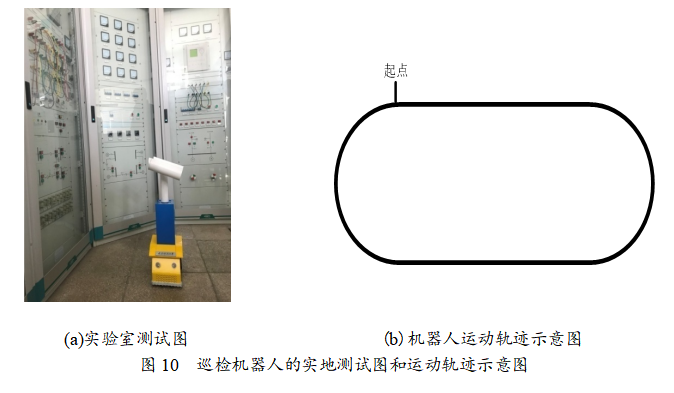
5.2 室内环境测试
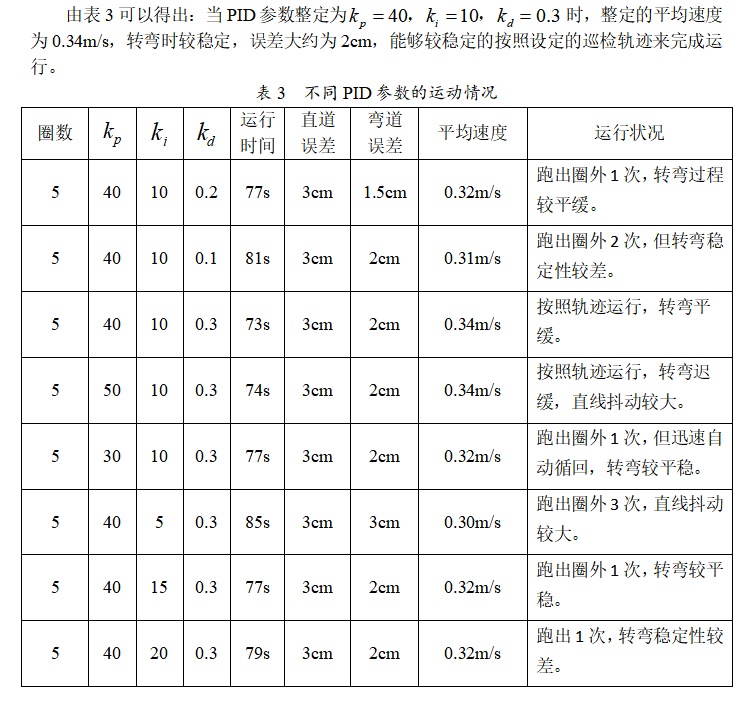
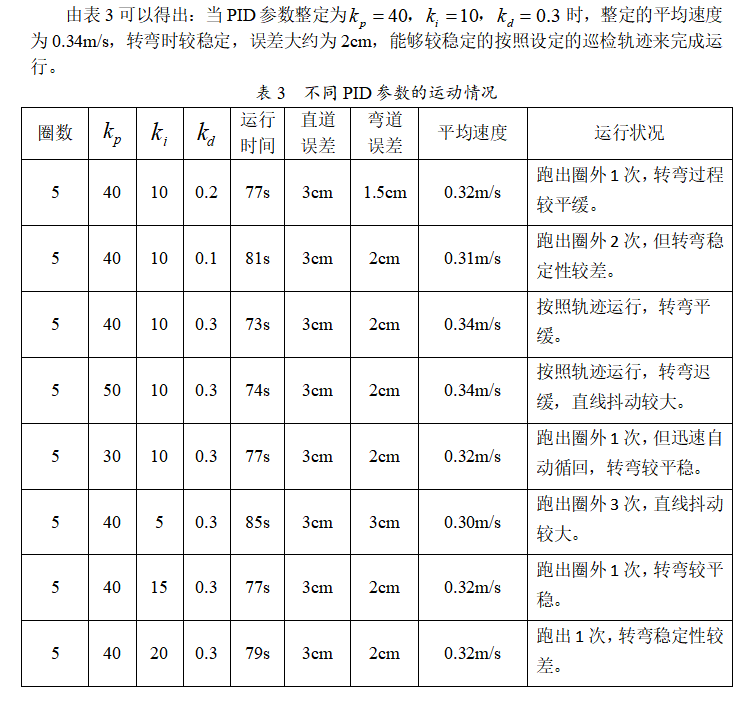
针对巡检机器人在室内的运动情况进行测试。室内运行路面为大理石地板砖,用胶带将2mm细铁丝在路面上粘成直线和转弯组成的闭合圆环,如图10所示。
5.3 爬坡实验
在室外环境中,以一个约为20°的斜坡作为试验场地,验证机器人在爬坡过程中的稳定性。具体过程如下:
(1)给机器人整体进行上电,确保各模块工作正常;
(2)连接通讯系统,进行上位机无线连接;
(3)将机器人放置到斜坡处,开始进行爬坡实验;
(4)完成爬坡实验后,断开连接,关闭电源,结束实验。
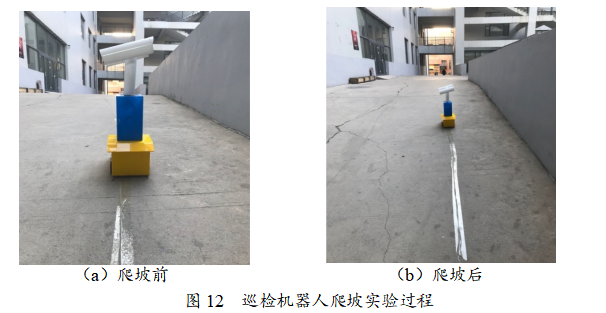
其爬坡实验过程如图12所示,实验表明机器人可以在大约20°的斜坡上运行。
6 结语
随着变电站规模的不断扩大,传统人工巡检方式已经远远不能满足变电站的巡检要求,巡检机器人代替人工巡检是智能变电站的必然趋势。但是,当前的巡检机器人的价格都比较昂贵,很难实现普及性的发展,因此,本文提出了一种普及性的巡检机器人原理样机,采用电磁传感器实现自主寻迹,同时搭载高清摄像机和温度传感器,并以卷积神经网络算法实现数字的识别。实验表明,该机器人样机可以满足基本的运行要求,为后期研制普及型巡检机器人打下了坚实的理论和实践基础。
参考文献:
[1]陈伟. 智能变电站技术及其设计应用研究[D]. 济南:山东大学,2017.
[2] 中国电器工业协会智能电网设备工作委员会. 智能变电站发展的现状与形势分析[J]. 电器工业, 2012(9):24-25+28-30+32-35.
[3] 何立民.现代计算机产业革命—嵌入式系统[J].世界产品与技术,2007(11):21-21.
[4] Beaudry J, Allan J F. Electrical substation inspection and intervention robot, field experiments[C]// International Conference on Applied Robotics for the Power Industry. 2015.
[5] 曹文明. 高压输电线路除冰机器人视觉控制方法研究[D].长沙: 湖南大学, 2014.
[6] Kevin Gomez. Power company uses robots to check substation equipment[J]. FERRET.19 September 2013.
[7]王金钗. 变电站巡检机器人磁导航系统设计与实现[D]. 成都:西南交通大学,2015.
[8] 钱金菊,王柯,王锐,彭向阳. 变电站智能机器人巡检任务规划[J]. 广东电力,2017,30(02):143-149.
[9] 孙国凯,韩刚.变电站巡检方式对比及其智能巡检机器人的研究与设计[J]. 电气时代,2008(07):92-94.
[10] 李祥,崔昊杨,皮凯云,束江,李鑫,许永鹏,盛戈皞.基于STM32的变电站巡检机器人系统设计[J]. 现代电子技术,2017,40(17):150-153+157.
[11] 吕红.基于卷积神经网络的手写数字识别系统的设计[J]. 智能计算机与应用,2019,9(02):54-56+62.
[12] 邓介一,刘黎志,谭培祥.基于神经网络的数字字符识别系统设计与实现[J]. 软件导刊,2017,16(05):47-50.
作者简介:
孙宏发(1992.6-),男,硕士,太原科技大学,研究方向:电气传动技术,
李昕涛(1973.12-),男,硕士,太原科技大学,研究方向:电气工程。
韩增强(1994.4-),男,硕士,太原科技大学,研究方向:电气传动技术。




共0条 [查看全部] 网友评论