


关键词:工业机器人;生产效率;模块化
1 引言
随着“中国制造2025”的强国战略的推进下,中国制造业迎来了突飞猛进的大发展,然而随着社会经济的高速发展和人口老龄化趋势加剧下,各大企业的人力成本不断增长,为了节约企业利润,提高企业工作效率,工业机器人以其极高的自动化、智能化、柔性化取代了人工,机器换人的发展趋势也将会愈来愈烈。
2 ABB机器人公司简介
ABB坚持“在中国,为中国和世界”的发展战略,推动技术研发的本土化,通过持续投入和优化研发布局不断提高本土研发与创新能力。2005年,ABB在中国建立了全球7大研发中心之一。ABB中国研发团队取得了一系列研发成果,开发出ABB最小的机器人IRB 120“中国龙”、全球最快的码垛机器人IRB 460以及应用于汽车制造行业的开门机器人、焊接机器人等、屡获殊荣的“明悦”智能楼宇对讲系统、以及面向未来的产品如,紧凑型气体绝缘开关设备ZX1.5-R SP、TEC ST智能变压器、550kV气体绝缘开关设备,和可以适用于中国90%高海拔地区的环网柜。2012年,ABB重庆制造的首台±800kV高压直流变压器通过测试并开始下线生产,这也是目前ABB在中国生产的电压等级最高的变压器产品;同时,ABB与国家电网紧密合作,成功研制出±1100kV换流变压器,不断在特高压直流研发领域取得里程碑式的突破。
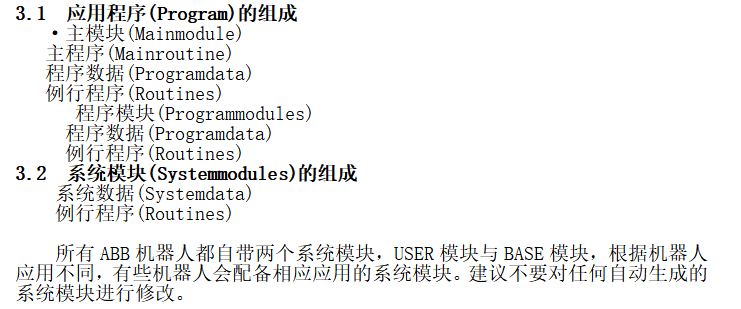
3 程序储存器(Programmemory)的组成
应用程序(Program)、系统模块(Systemmodules),机器人程序储存器中,只允许存在一个主程序;所有例行程序与数据无论存在于哪个模块,全部被系统共享;所有例行程序与数据除特殊定义外,名称必须是唯一的。
5.3 输入输出群指令
·do指机器人输出信号。
·di指输入机器人信号。
·输入输出信号必须在系统参数中定义。
·输入输出信号有两种状态,1(High)为接通,0(Low)为断开。
(1)输出信号指令:
A、输出输出信号指令:set dol
do1:输出信号名。(signaldo)将一个输出信号赋值为1。
B、复位输出信号指令:Reset do1
do1:输出信号名。(signaldo)将一个输出信号赋值为0。
C、输出脉冲信号指令:ulseDO do1
do1:输出信号名。(signaldo)输出一个脉冲信号,脉冲长度为0.2s。
参变量:
·[PLength](num) 脉冲长度,0.1s-32s。
(2)输入信号指令:
WaitDI di1, 1
di1:输入信号名。(signaldi)
1:状态。(dionum)
参变量:
·[MaxTime](num)等待输入信号最长时间s。
·[TimeFlag](bool)逻辑量,TRUE或FALSE。
如果只选用参变量[MaxTime],等待超过最长时间后,机器人停止运行,并显示相应出错信息。如果同时选用参变量[MaxTime]与参变量[TimeFlag],等待超过最长时间后,无论是满足等待的状态,机器人将自动执行下一句指令。如果在最长等待时间内得到相应信号,将逻辑量置为FALSE,如果超过最长等待时间,逻辑量置为TRUE。
5.4 通信指令(人机对话)
(1)清屏指令:TPErase
(2)写屏指令:PWrite String
tring:显示的字符串。(string)在示教器显示屏上显示字符串数据,也可以用“……”形式直接定义字符串,每一个写屏指令最多显示80个字符。
(3)功能键读取指令:TPReadFK, Answer , Text , FK1 , FK2. FK3, FK4 , FK5
Answer:赋值数字变量。(num)
Text:显示屏显示的字符串。(string)
FK1:功能键1显示的字符串。(string)
FK2:功能键2显示的字符串。(string)
FK3:功能键3显示的字符串。(string)
FK4:功能键4显示的字符串。(string)
FK5:功能键5显示的字符串。(string)
在示教器显示屏上显示字符串数据,在功能键上显示相应字符串,选择按相应的功能键,机器人自动给数字变量赋于相应数值1-5。
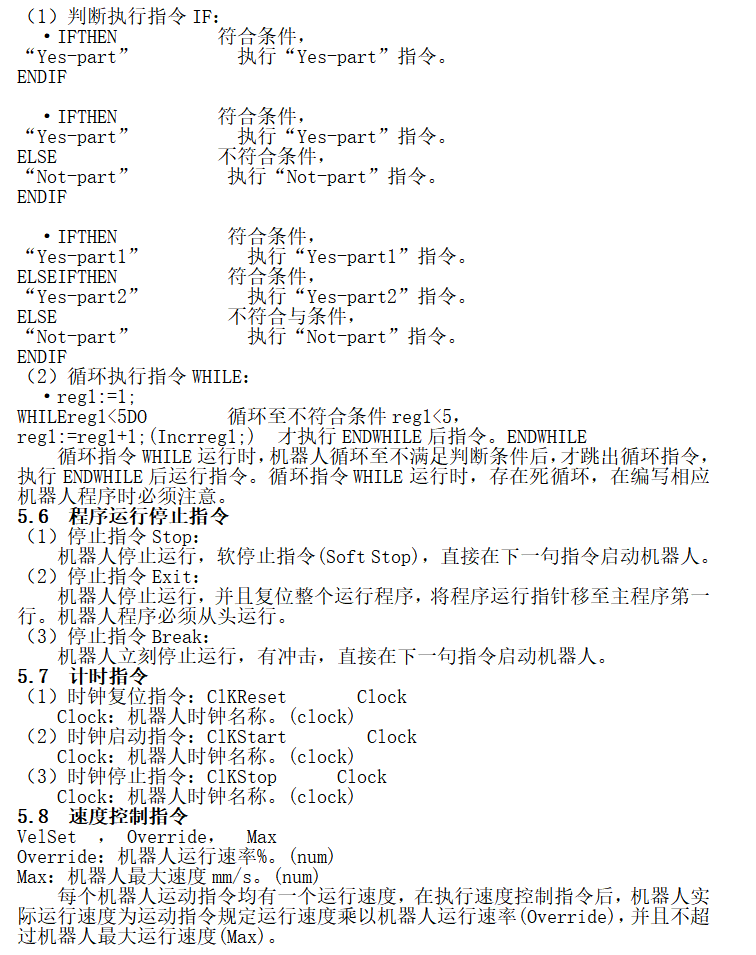
5.5 程序流程指令
5.9 等待指令
WaitTime,Time
Time:机器人等待时间s。(num)
等待指令只是让机器人程序运行停顿片刻。
5.10 赋值指令
Data:= , Value
Data:被赋值的数据。(All)
Value:数据被赋予的值。(SameasData)
举例:
ABB:=FALSE;(bool)
ABB:=reg1+reg3;(num)
ABB:=“WELCOME”;(string)
Home:=p1;(robotarget)
tool1.tframe.trans.x:=tool1.tframe.trans.x+20;(tooldata)
5.11 负载定义指令
GripLoad , Load
Load:机器人当前负载。(loaddata)
6 例行程序
6.1 建立新例行程序
→菜单键View→2Routine→功能键New
·Name例行程序名称。
最长16个字符,第一位必须为字母。
·Type例行程序类型。共有3种类型。
ROC-普通例行程序
FUNC-函数例行程序
TRAP-中断例行程序
·InModule当前例行程序所属模块名称。
·Datatype数据类型,函数例行程序专用。
6.2 例行程序参数设置
每个例行程序可以自带多个变量,即参数。建立一个新例行程序后或重定义例行程序(Dupl)后,显示屏会显示以上窗口。通过功能键New增加参数,使用切换键将光标移动至相应参数,进行修改和定义。
·Name参数名称。
光标指向参数名称时,功能键出现Text,用来更改参数名称。最长16个字符,第一位必须为字母。
·Datatype数据类型。
光标指向数据类型时,功能键出现Chang…,用来更改例行程序参数数据类型。
·Required必需性选择。
光标指向必需性选择时,功能键出现Yes与No选项,选择Yes,会出现确认符*。
·Alt分批输入参数选项。
使用此项功能,必须是非必需参数。光标指向分批输入参数选项时,功能键出现First与Tail选项。
First-开始使用的参数。
Tail-结尾使用的参数。
·Mode数据模式。
光标指向必需性选择时,功能键出现In与Inout选项。In-参数使用时,只能读取。Inout-参数使用时,可以读写。
7 机器人测试
7.1 检查程序语法
→菜单键File→7CheckProgram
7.2 编程窗口(Test)
→菜单键View→5Test
(1)功能键:
tart:启动程序,机器人按程序连续运行。
FWD:机器人程序向前单步运行。
WD:机器人程序向后单步运行。
ModPos:修正机器人运行位置。
Instr:切换至指令窗口。
(2)运行模式选择:
在测试窗口按切换键,并且将光标移至运动模式选择(Running),此时,功能键显示Cont与Cycle选项。
·Cont连续运行模式,程序自动循环执行。
·Cycle单循环模式,程序运行完自动停止。
(3)运行速率选择:
在测试窗口按切换键,并且将光标移至运动速率选择(Speed),此时,功能键显示-%、+%、25%与100%选项,使用功能键确定运行速率。
·机器人实际运行速度为程序运动指令定义速度乘以相应百分比,最大不超过250mm/s。
·-%与+%在1%至5%之间将以1%递增或递减,-%与+%在5%至100%之间将以5%递增或递减。
·25%与100%是将机器人运行速率快捷的切换至25%与100%。
·运行速度调整可在程序运行时同步进行。
·在焊接程序中,运行速度选择只改变空行程速度,焊接速度不变。
(4)程序运行指针:
·程序运行指针(简称PP)至关重要,它指示出一旦启动程序,程序将从哪里起执行。
·程序运行指针与光标必须指向同一行指令,机器人才能正常启动。
·使用菜单键Special可以更改程序运行指针位置,选择执行的指令。
1) MoveCursortoPP:将光标移至PP位置。
2) MovePPtoCursor:将PP移至光标位置。
3) MovePPtoMain将PP:移至主程序第一行。
4)MovePPtoRoutine:将PP移至相应例行程序。
7.3 删除指令
将光标移至所要删除的指令行,按删除键,用功能键OK确认。
7.4 增加指令
在测试窗口按功能键Instr→进入指令窗口,选择增加指令,被选择的指令将生成在光标所指指令行的下一行。如果光标在程序第一行,会出现一个提示窗口选择新指令生成在程序第一行(选择功能键Yes)或下一行(选择功能键No),然后用功能键OK确认。
7.5 修正工作点
·将机器人移动至需要记录的工作点。
·将光标移动到需要修正的运动指令,按功能键ModPos修正工作点。
·注意此时操作窗口所选择的Tool与Wobj必须与运动指令所使用的一致。
7.6 停止
按S-Stop键停止测试,尽量避免直接放开使能器(Enabling device)。
参考文献:
[1]金帅. 浅谈ABB机器人新车型程序导入[J]. 程序导入,2019(03)
[2]林栋. 焊接机器人规范化研究[J]. 程序规范化,2018(10)
[3]李亚军. 基于ABB机器人垛型算法的应用分析[J]. 算法分析,2018(10)
[4]潘俊浩. 面向ABB IRB4600机器人的虚拟示教系统研究[J]. 虚拟示教,2017(12)
作者简介:
赵清玲(1999-),女,汉族,重庆城市职业学院,研究方向:工业机器人应用




共0条 [查看全部] 网友评论