



№ШјьҙКЈәБҪПаІҪҪшөз»ъЈ»STM32F103RET6Ј»A3985Ј»HЗЕЈ»Пё·ЦЈ»МЭРОјУјхЛЩ
Abstract: A stepper motor controller is designed, and the control parameters are set by the upper computer. This design takes STM32F103RET6 system as the main control unit and A3985 plus double H bridge as the driving unit of the two-phase stepping motor. The upper computer serial interface as the human-computer interaction interface can control the maximum current and current subdivision of the two-phase stepping motor and realize open-loop control including rectangular and trapezoidal acceleration and deceleration driveЎЈA detailed analysis of the driving chip and related interface circuit, controller design scheme.
Key words: Two-phase stepping motor; STM32F103RET6; A3985; H bridge; Subdivision; Trapezoidal acceleration and deceleration
1 ТэСФ
ЛжЧЕҝЖјјҪшІҪЈ¬ёЯР§ұгҪЭөДФЛ¶ҜҝШЦЖТ»ЦұКЗЙиұёЧФ¶Ҝ»ҜЎўЦЗДЬ»ҜЦРЦШТӘДЪИЭЈ¬ЧчОӘКэЧЦөз»ъөДІҪҪшөз»ъЈ¬ТтЖдҝШЦЖәНЗэ¶ҜөДјтөҘЎўіЙұҫҪПөНЎўМе»эҝЙҪПРЎөИМШөг¶шУҰУГ№г·әЎЈ
ұҫОДЦјФЪТФSTM32F103RET6[1]ПөНіЧчОӘЦчҝШЦЖөҘФӘЈ¬ІўТФA3985[2]НвјУЛ«HЗЕЧчОӘБҪПаІҪҪшөз»ъөДЗэ¶ҜөҘФӘЈ¬№№іЙТ»МЧҝШЦЖЖчЈ¬ЖдДЬҝШЦЖБҪПаІҪҪшөз»ъөДЧоҙуөзБчЎўөзБчПё·ЦЈ¬КөПЦ°ьАЁҫШРОЎўМЭРОјУјхЛЩЗэ¶ҜөДҝӘ»·ҝШЦЖЎЈ
2 A3985өДМШРФәН№ӨЧчФӯАн
2.1 A3985өДМШРФ
A3985КЗТ»ҝоБй»оөДЛ«В·И«ЗЕГЕј«Зэ¶ҜЖчЈ¬ККУГУЪЗэ¶ҜёЯ№ҰВКЛ«ј«БҪПаІҪҪшөз»ъЎЈРиУРУЙНвІҝNНЁөАMOSFET№ҰВК№ЬМṩөз¶Ҝ№ҰВКЎЈөзФҙөзС№ОӘ12ЦБ50·ьМШЈ¬өзБчЦөЙППЮҫц¶ЁУЪНвІҝMOSFET№ЬөДҙуРЎЎЈ
ҫЯУРSPIНЁРЕҝЪЈ¬ДЪУРБҪёцҙ®РРјДҙжЖчМṩБЛНкИ«КэЧЦҝШЦЖЈ¬ҝЙКөПЦ¶Ф№Ш»ъКұјдЎўПыТюКұјдЎўНЈ»ъКұјдЎў»мәПЛҘјхПөКэөИұаіМЎЈЛщУРДЪІҝКұјдҝЙТФҙУЦчКұЦУ»сИЎЈ¬ЦчКұЦУҝЙУЙРҫЖ¬ІъЙъЎЈ
ҝЙНЁ№эҙшТ»ёц·ҪПтО»әНБҪёц6О»ПЯРФDACөДҙ®РР¶ЛҝЪј°ІОҝјөзС№ЙиЦГЖЪНыөДёәФШөзБчөзЖҪј°·ҪПтЎЈЦ§іЦОўІҪЦБИ«ІҪҪшЗэ¶ҜЎЈ
ҫЯУРөзБч»»ПтЛАЗшұЈ»ӨЎўДЪІҝ№эИИ¶ПөзұЈ»ӨЈЁTSDЈ©ј°З·С№ұХЛшұЈ»ӨЈЁUVLOЈ©Ј¬РҫЖ¬ОВ¶И№эёЯЎўЗ·С№¶ј»бЧФ¶Ҝ№ШұХ№ӨЧчЎЈ
ПаҪПіЈјыИзA3977өИДЪЦГ№ҰВКMOS№ЬЗэ¶ҜРҫЖ¬Ј¬A3985өДЗэ¶ҜөзС№ҙуЈ¬ҝЙСЎФсҙуөзБчөДN№өөАMOSFETЎЈНЁ№эSPIНЁРЕ¶ФЖдјДҙжЖчҪшРРБй»оЕдЦГЈ¬ҙпөҪ¶аЦЦҝШЦЖР§№ыЈ¬ИзПё·ЦөзБчЦөөДБй»оЙи¶ЁЎЈ
2.2 A3985өД№ӨЧчФӯАн
ИзНј1ЛщКҫОӘA3985өД№ҰДЬҝтНјЎЈКҫТвБЛРҫЖ¬ДЪІҝ»щұҫ№ҰДЬј°НвБ¬өДHЗЕөзВ·ЎЈИзұн1ЛщКҫОӘA3985өДјД0әНјД1өДО»ЛөГчЎЈ

Нј1 A3985№ҰДЬҝтНј
ұн1 јД0әНјД1өДО»ЛөГч
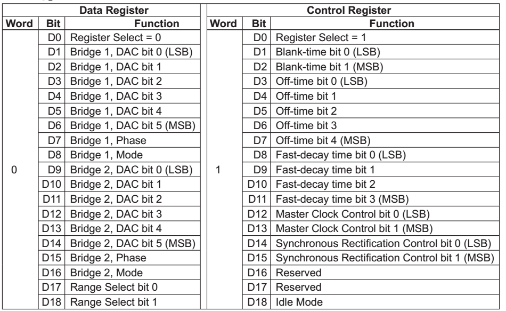
УЙНј1ЛщКҫЈ¬A3985ДЪЦГөДЦчТӘөҘФӘУР1ёцSPIҪУҝЪөзВ·Ј¬ҙуІҝ·Ц№ҰДЬ¶јНЁ№эSPI·ГОКІЩЧчЈ¬SPIДЪІҝУөУР2ёцјДҙжЖчЈ¬Изұн1ЛщКҫЈәЧЦ0КэҫЭјДҙжЖчЈ¬ЧЦ1ҝШЦЖјДҙжЖч(ТФПВјтіЖјД0ЎўјД1)ЎЈјД0ҝЙЙи¶ЁІОКэЈәјД0СЎ¶ЁЎўDACЦөЎўHЗЕЙППВұЫНЁ¶ПВЯјӯЎўҝзөјGmЦөЈ¬јД1ҝЙЙи¶ЁІОКэЈәјД1СЎ¶ЁЎўПыТюКұјдЎўPWM№Ш¶ПКұјдЎўҝмЛЩЛҘјхКұјдЎўКұЦУСЎФсЎўН¬ІҪХыБчЎўҝХПРДЈКҪЈ»2ёцҝЙұаіМPWMҝШЦЖөзВ·Ј¬ЕдәПДЪЦГ·ЕҙуөзВ·Зэ¶ҜГҝёцНвІҝHЗЕЈ¬ҫЯУРPWMФШІЁ¶ЁКұЎўПыТюЎўЛҘјхДЈКҪЙи¶Ё№ҰДЬЈ»2ёцЙи¶ЁөзБчөД6О»DACөзВ·Ј»2ёцөзБчёРУҰұИҪПЖчЈ»2МЧДЪЦГ·ЕҙуөзВ·Ј¬·ЦұрЗэ¶Ҝ¶ФУҰНвІҝHЗЕЎЈ
2.2.1 HЗЕДЪөзБчөДҝШЦЖФӯАнЈә
ГҝёцНвІҝHЗЕЈЁУЙN№өөАMOSFET№№іЙЈ©ЙПБчҫӯөДөзБчУЙ№М¶Ё№Ш¶ПКұјдөДPWMҝШЦЖөзВ·ҫц¶ЁЈ¬ёГөзВ·Ҫ«ГҝПаИЖЧйЦРөДёәФШөзБчПЮЦЖөҪЛщРиөДЦөITrip(max)Ј¬јҙЧоҙуөзБчЦөЎЈФЪөз»ъФЛРРГҝТ»ІҪКұЈ¬HЗЕЙПөДөзБчУЙНвІҝөзБчёРУҰөзЧиЖчRSENSE1»тRSENSE2(ТФПВјтіЖRSENSE)ЙПөДөзС№ЦөЎўІОҝјөзС№VREFТФј°DACКдіцЦөН¬Кұҫц¶ЁЎЈ
ИзНј1Ј¬ЧоіхЈ¬Т»¶Ф¶ФҪЗөДФҙРНәНВ©РНMOSFETұ»ЖфУГЈ¬өзБчБч№эөз»ъИЖЧйәНөзБчёРУҰөзЧиЖчRSENSEЎЈөұRSENSEЙПөДөзС№ҙуУЪөИУЪDACКдіцөзС№КұЈ¬өзБчёРУҰұИҪПЖчЦШЦГPWMЛшҙжЖчЈ¬ҙУ¶ш№ШұХФҙРНMOSFET№Ь(ВэЛҘјхДЈКҪ)»тВ©РНәНФҙРНMOSFET№Ь(ҝмЛҘјхДЈКҪ)ЎЈНЁ№эСЎФсRSENSEәНІОҝјөзС№VREFАҙЙиЦГЧоҙуөзБчЦөЈ¬ПВГжКЗҪьЛЖ№«КҪЈә
![]() №«КҪЈЁ1Ј©
№«КҪЈЁ1Ј©
№«КҪЈЁ1Ј©ДЪөДҝзөјGmКЗёц·¶О§ТтЧУЈ¬УЙјД0ДЪ¶ФУҰҝзөјGmО»Йи¶ЁЎЈ
ФЪөз»ъФЛРРөДГҝТ»ІҪКұЈ¬6О»ҝн¶ИөДDAC»бТАҫЭVREFЦөКдіцТ»өзС№ЦөVDACөҪөзБчёРУҰұИҪПЖчТ»¶Л,№«КҪИзПВЈә
![]() №«КҪЈЁ2Ј©
№«КҪЈЁ2Ј©
№«КҪЈЁ2Ј©ДЪөДDACУЙјД0ДЪ¶ФУҰHЗЕЙПөДDACО»Йи¶ЁЎЈ
ГҝёцDACКдіцөДVDACөзС№Цө¶ФУҰөДөзБчЦөОӘЈә
![]() №«КҪЈЁ3Ј©
№«КҪЈЁ3Ј©
І»Н¬УЪИзA3977өИРҫЖ¬НЁ№эВЯјӯұаТлЖчЦұҪУЙи¶ЁПё·ЦО»ЎЈA3985Г»УРЦұҪУҪшРРПё·ЦЙи¶ЁөДВЯјӯұаТлЖчЈ¬КөК©Пё·ЦКұЈ¬РиТӘНЁ№эИнјюЙи¶ЁГҝТ»ІҪDACөДЦөЎЈ
2.2.2 ҙ®РРҪУҝЪј°ІЩЧч
A3985КЗНЁ№эSPIНЁРЕҝШЦЖөДЈәSDIЎўSDOЎўSCKЎўSTRТэҪЕ·Цұр¶ФУҰҙ®РРКэҫЭКдИлЎўҙ®РРКэҫЭКдіцЎўКұЦУЎўСЎНЁЎЈДЪЦГөДјД0»тјД1өДКэҫЭ№ж·¶¶јКЗТ»ёц19О»өДЧЦіӨЈә18О»өДКэҫЭјУЙП1О»јДҙжЖчСЎ¶ЁО»ЎЈWCКЗјД1СЎНЁТэҪЕЈ¬WCёЯөзЖҪКұЈ¬ОЮ·ЁРҙИлјД1Ј¬WCөНөзЖҪКұЈ¬ІЕДЬРҙИлјД1Ј¬WCЧҙМ¬І»У°ПмјД0ЎЈЖӘ·щЛщПЮЈ¬ҙ®ҝЪРҙІЩЧчКұРтөИРЕПўҙЛҙҰІ»ФЩ·уКцЎЈ
2.3 A3985ВЯјӯҝШЦЖІЯВФ
Хл¶ФІҪҪшөз»ъЗэ¶ҜЈ¬A3985ЦчТӘөДҝШЦЖУРК№ДЬЎўХэ·ҙЧӘЎўөзБчПё·ЦЎўөН№ҰәДҙэ»ъДЈКҪЎЈ
(1)К№ДЬЈәІ»РиТӘҫӯ№эSPIІЩЧчЈ¬ЦұҪУІЩЧчРҫЖ¬Ј¬ЙиЦГХӨј«Зэ¶ҜКЗ·с№ӨЧчЎЈENBALBE№ЬҪЕЦГ0К№ДЬХӨј«Зэ¶ҜЈ¬ЦГ1№ШұХХӨј«Зэ¶ҜЈ»
(2)Хэ·ҙЧӘЈәНЁ№эSPIІЩЧчјД0өДD7ј°D15О»Ј¬·ЦұрҝШЦЖНвІҝБҪёцHЗЕөзВ·өДөзБчХэ·ҙБчПтЈ¬ҙпөҪөз»ъХэ·ҙЧӘДҝөДЈ»
(3)өзБчПё·ЦЈәНЁ№эSPIІЩЧчјД0өДD1-D6ЎўD9-D14О»(6О»DACөДЙи¶ЁО»)Ј¬ТФј°D17ЎўD18О»(ҝзөјGmЙи¶ЁО»)Ј¬ҝЙТФөчҪЪНвІҝБҪёцHЗЕөзВ·өДөзБчЦөЈ¬ҙпөҪөзБч¶ҜМ¬ұХ»·ҝШЦЖЈ¬КөПЦөзБчПё·ЦЈ»
(4)өН№ҰәДҙэ»ъДЈКҪЈәSPIІЩЧчјД1өДD18О»ёҙО»Ј¬ҪшИлөН№ҰәДҙэ»ъДЈКҪЈ¬ХвҪ«ҪыУГЗэ¶ҜЖчКдіцЈ¬ЙиұёҪ«ПыәДҪПөНөДёәФШөзФҙөзБчЎЈD18О»ЦГО»1әБГлЈ¬АлҝӘөН№ҰәДҙэ»ъДЈКҪЎЈ
3 ҝШЦЖЖчөзВ·ЙијЖ
ҝШЦЖЖчөзВ·ЦчТӘ·ЦОӘDCөзФҙөҘФӘЎўҙ®ҝЪөҘФӘЎўЦчҝШөҘФӘЎўЗэ¶ҜөҘФӘЎўI/OөҘФӘЎЈЙПО»»ъЦёБоНЁ№эҙ®ҝЪөҘФӘҪУКХЈ¬ЦчҝШөҘФӘөДК¶ұрЎў·ЦОцЦёБоәуЈ¬ҝШЦЖA3985Зэ¶ҜөҘФӘЗэ¶ҜІҪҪшөз»ъЎЈDCөзФҙөҘФӘёшҝШЦЖЖч№©өзЎЈФӨБфI/OөҘФӘ·ҪұгКөјКУҰУГЎЈҝШЦЖЖчөзВ·ЧЬМеЙијЖҝтНј,ИзНј2ЛщКҫЎЈ
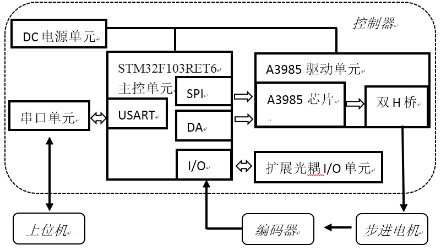
Нј2 ҝШЦЖЖчөзВ·ЧЬМеЙијЖҝтНј
3.1 УІјюөзВ·ЙијЖ
(1)DCөзФҙөҘФӘЈәЧчУГТ»ОӘёЯС№DCВЛІЁәу№©Л«HЗЕј°НвІҝІҪҪшөз»ъК№УГЈ»ЧчУГ¶юОӘёЯС№DCЧӘОӘөНС№DC№©STM32әНA3985РҫЖ¬К№УГЎЈИзНј3ЛщКҫЈ¬ЙэС№РҫЖ¬TPS0150DRVTҪ«3.3V DCЧӘОӘ5V DCЈ¬ҝЙ№©НвІҝұаВлЖчК№УГЎЈөзФҙРҫЖ¬A8499ДЬҪ«8-50VөзФҙЧӘ»ҜОӘ3.3V DC/1.3AөНС№ҙуөзБчөзФҙЎЈ
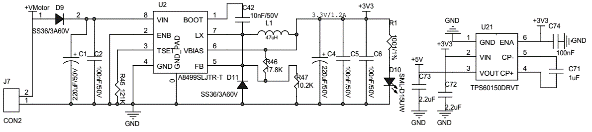
Нј3 DCөзФҙөҘФӘ
(2)ҙ®ҝЪөҘФӘ[6]ЈәЦчТӘёәФрЙПО»»ъәНЦчҝШөҘФӘНЁРЕЎЈЙПО»»ъНЁ№эҙ®ҝЪөҘФӘ·ўЛНПаУҰөД№ҰДЬЦёБоёшЦчҝШөҘФӘЈ¬ЦчҝШөҘФӘЦҙРРЙПО»»ъөДЦёБоЈ¬ҝШЦЖA3985Зэ¶ҜөҘФӘЎЈИзНј4ЛщКҫЈ¬GH340РҫЖ¬ДЬҪ«ҙ®ҝЪTTLРЕәЕЧӘUSBРЕәЕЎЈ
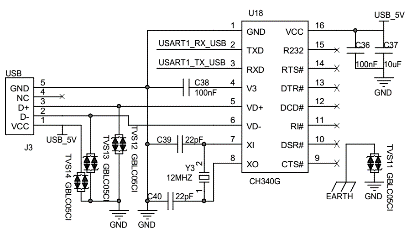
Нј4 ҙ®ҝЪөҘФӘ
(3)ЦчҝШөҘФӘЈәөұЦчҝШөҘФӘҪУКХЙПО»»ъөДЦёБоЈ¬НЁ№эSPIНЁРЕ,ИГA3985Зэ¶ҜөҘФӘЦҙРРҝШЦЖТӘЗуЎЈИзНј5ЛщКҫЈ¬STM32F103RET6ОӘЦчҝШРҫЖ¬Ј¬УөУР512KЧЦҪЪFLASHЎў64KЧЦҪЪROMЈ¬ҙш8ёц¶ЁКұЖчЈ¬УөУР12О»DACКдіцЎўSPIЎўUSARTНЁРЕҪУҝЪөИөИ·бё»ЧКФҙЈ¬ВъЧгК№УГЈ¬·ҪұгА©Х№Йэј¶ЎЈ

Нј5 ЦчҝШөҘФӘ
(4)A3985Зэ¶ҜөҘФӘЈәЦҙРРЦчҝШөҘФӘПВҙпөДҝШЦЖЦёБоЈ¬Зэ¶ҜІҪҪшөз»ъЎЈИзНј6ЛщКҫЈ¬Зэ¶ҜРҫЖ¬ОӘA3985Ј¬НвІҝЛ«HЗЕУЙNНЁөАMOSFET№ҰВК№ЬҙоҪЁ¶шіЙЈ¬№ҰВК№ЬСЎөНөјНЁөзЧиЎўөНҪЪөгөзИЭөДSI4900DYЈ¬өұ»·ҫіОВ¶И70ЙгКП¶ИКұЈ¬Жд·еЦөөзБчДЬҙп3.4AЎЈУл№ҰВК№ЬХӨј«ҙ®БӘөДөзЧиR48-R56ДЬҝШЦЖ№ҰВК№ЬөДХӨј«өзИЭЛІМ¬ід·ЕөзБчөДЛЩВКЎЈC43-C45ОӘЕдәПЗэ¶ҜЗЕХэіЈ№ӨЧчөДЧФҫЩөзИЭЎЈRSENSE1әНRSENSE2ОӘёЯҫ«¶ИөДөзБчёРУҰөзЧиЈ¬ЧиЦөОӘ40mOhms±1%ЎЈ
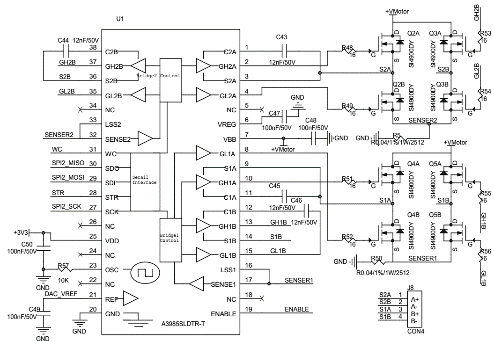
Нј6 A3985Зэ¶ҜөҘФӘ
()I/OөҘФӘЈәҙУЦчҝШРҫЖ¬ТэіцI/O·ҪұгКөјКУҰУГЎЈI/OҝЪУРТ»Іҝ·ЦУГУЪА©Х№№всоI/OЈ¬ҝЙУГУЪҪУКХФӯөгО»ЦГөИРЕәЕЈ¬БнТ»Іҝ·ЦКЗЦұҪУҙУРҫЖ¬ТэіцЈ¬ҝЙУГУЪұИИз¶ФҪУұаВлЖчКдіцҪУҝЪЎЈИзНј7ЛщКҫ,өНЛЩ№всоIS2801ҝЙёфАлБҪ¶Лҙ®ИЕЎЈ
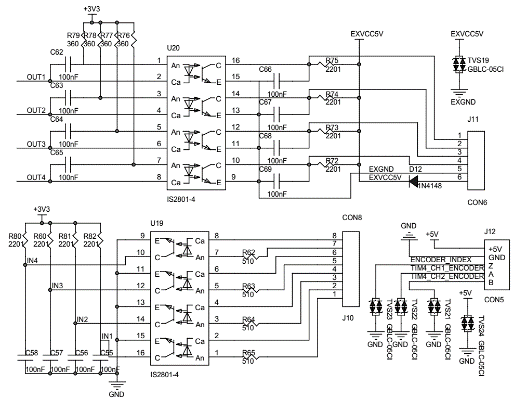
Нј7 I/OөҘФӘ
3.2 №ҰДЬЙијЖ
УІјюЙијЖКЗҙоҪЁ»щұҫЖҪМЁЈ¬ұШРлёЁТФјтөҘөДИнјюҝШЦЖЈ¬КөПЦҝШЦЖЖчөД»щұҫ№ҰДЬЈә
(1)КөПЦІҪҪшөз»ъЧоҙуөзБчЎўөзБчПё·ЦҝШЦЖ
ЧоҙуөзБчҝШЦЖЈәЧоҙу·еЦөөзБчИ繫КҪЈЁ1Ј©ЎЈұҫЙијЖҪбәПРиЗуЈ¬ФЪСЎ¶ЁУІјюөДөзБчёРУҰөзЧиRSENSEәуЈ¬ЦчҝШөҘФӘSTM32ҝШЦЖЧФҙшөД12О»DACКдіцVREFәНЙи¶ЁA3985РҫЖ¬өДҝзөјGmЈ¬ҫц¶ЁЧоҙуөзБчЦөЎЈ
ҪбәПРҫЖ¬ЎўФӘЖчјюөДІОКэТФј°»·ҫіОВ¶ИЈ¬өзВ·№©өз·¶О§12-48V DCЈ¬Зэ¶ҜЧоҙуУРР§өзБчҙУ0.6AөҪ2.6AҫщҝЙСЎФсЈ¬4Іг°еPCBІјҫЦЎЈ
өзБчПё·ЦҝШЦЖ[3] [4]ЈәөзБчПё·Ц°ҙ№«КҪЈЁ3Ј©ЎЈОӘјтұаіМ»ҜЈ¬Ц»ФЪЙи¶ЁЧоҙуөзБчКұСЎ¶ЁҝзөјGmЈ¬Пё·ЦЦРІ»ФЩөчGmЎЈИ·¶ЁБЛGmәНRSENSEЈ¬ЦчҝШөҘФӘНЁ№эSPIНЁРЕКөКұөчХыA3985РҫЖ¬өД6О»DACЦөЈ¬ёДұдVDACөзС№Ј¬ҙпөҪөзБчПё·Цұд»ҜДҝөДЎЈГҝТ»ІҪҪшөДөзБчПё·ЦЈ¬ТІҫНКЗХвСщөГАҙөДЎЈ
A3985РҫЖ¬УөУРөД6О»DACЈ¬өзБчПё·ЦКэҝЙКөПЦХыІҪЎў2Ўў4Ўў8Ўў16Ўў32Ўў64Пё·ЦЎЈ
(2)КөПЦІҪҪшөз»ъИОТвІҪҪшҪЗ¶ИЎўІҪҪшЛЩ¶Иј°»»ПтөДҝШЦЖ
ИОТвІҪҪшҪЗ¶ИЎўЛЩ¶ИөДҝШЦЖЈәЙПО»»ъПИЙи¶ЁЧоҙуөзБчЎўПё·ЦКэЎўФЛРРҪЗ¶ИЎўјУјхЛЩ¶ИЎўФЛРРЛЩ¶ИөИІОКэЈ¬ФЩСЎФсФЛРРЦёБоЈ¬НЁ№эҙ®ҝЪПВҙпёшЦчҝШөҘФӘЈ¬ЦчҝШөҘФӘНЁ№эЕР¶П·ЦОцЈ¬СЎ¶ЁПаУҰөДіМРтДЈҝйЈ¬НЁ№эSPIІЩЧчЈ¬ЦрІҪёьРВA3985ЦРјД0»тјД1Ј¬ЖдЦРЦчҝШөҘФӘҝШЦЖSTRСЎНЁРЕәЕөДҙОКэәНЖөВКЎЈ
ФЪёьРВТ»ҙОA3985ЦРјД0»тјД1ЦөЦ®әуЈ¬ІЩЧчТ»ҙОSTRСЎНЁЈ¬јДҙжЖчЦө»бФЪSTRөДЙПЙэұЯСШБўјҙНЁ№эA3985РҫЖ¬ҪшРРҪвОцЈ¬Зэ¶ҜЛ«HЗЕөзВ·НкіЙТ»ҙОөз»ъІҪҪшЎЈ¶ФУЪЦё¶ЁФЛРРҪЗ¶ИЈ¬ёщҫЭЦчҝШөҘФӘөДДЪЦГіМРтјЖЛгіцТӘІҪҪшөДҙОКэЈ¬ЦҙРР¶аҙОІҪҪшјҙҝЙЎЈ
STRСЎНЁЖөВКҫц¶ЁБЛјДҙжЖчЦөөДёьРВЖөВКЈ¬¶ФУҰІҪҪшөз»ъөДФЛРРЛЩ¶ИЎЈФЛРРЦРФЩЕдәПA3985РҫЖ¬өДDACЦөөДЦё¶Ё№жВЙұд»ҜЈ¬КөПЦІҪҪшөз»ъФЪЦё¶ЁФЛРРЛЩ¶ИПВөДәгБҰҫШІҪҪш[4]ЎЈ
»»ПтҝШЦЖЈәЦчҝШөҘФӘSTM32НЁ№эSPIІЩЧчјД0өДD7ј°D15О»Ј¬·ЦұрҝШЦЖНвІҝБҪёцHЗЕөзВ·өДөзБчХэ·ҙБчПтЈ¬ҙпөҪөз»ъХэ·ҙЧӘДҝөДЎЈ
4 ИнјюЙијЖ
јшУЪИнјюҝӘ·ўЦЬЖЪЎўРФјЫұИөДҝјВЗЈ¬ұҫЙијЖІЙУГҫШРОЎўМЭРОјУјхЛЩБҪЦЦөДҝӘ»·ҝШЦЖЎЈ
ҫШРОЗэ¶ҜЦчТӘёЕДоКЗІҪҪшөз»ъөДЖф¶ҜЖөВКөИУЪФЛРРЖөВКЈ¬ЦұЦБНкіЙЦё¶ЁІҪҪшҫаАлЎЈұҫЙијЖИнјюЙПЦ»ТӘНЁ№эSTM32өДSPIНЁРЕј°КұёьРВA3985РҫЖ¬өДЧЦ0әНЧЦ1јДҙжЖчЦөТФј°STRСЎНЁЖөВКЈ¬ҫНДЬҙпөҪЦё¶ЁөДФЛРРЖөВКЎЈІҪҪшөДЛЩ¶ИәНІҪҪшКэөДҝШЦЖЈ¬НЁ№эSTM32¶ЁКұЖчЦР¶ПіМРтҙҰАнSPIНЁРЕёьРВјД0ЎўјД1КэҫЭЎўSTRСЎНЁЖөВКәНҙОКэНкіЙЎЈ
МЭРОјУјхЛЩЗэ¶ҜЦчТӘёЕДоКЗІҪҪшөз»ъөДЖф¶ҜәННЈЦ№ЖөВКРЎУЪФЛРРЖөВКЈ¬ФЛРРөҪФЛРРЖөВКРиТӘУРјУЛЩ¶И№эіМЈ¬өҪЦё¶ЁІҪҪшҫаАлЗ°Т»¶ОКұјд»№УРјхЛЩ№эіМЈ¬ө«јУЛЩ¶ИәНјхЛЩ¶ИөДЦөКЗәг¶ЁЦөЎЈҝШЦЖМЭРОјУјхЛЩЛг·ЁјыІОҝјОДөө[5][6]Ј¬әЬИЭТЧРЮёДІўТЖЦІөҪSTM32Ј¬ҙЛҙҰІ»ФЩЙгКцЎЈ
ҫШРОЎўМЭРОјУјхЛЩіМРт·Цұр·вЧ°ОӘ¶АБўөДЧУіМРтДЈҝйЈ¬ЧУіМРтДЈҝйөДИлҝЪІОКэКЗЗэ¶Ҝ»щұҫІОКэ°ьАЁМЭРОјУјхЛЩЛг·ЁөДұШТӘІОКэТФј°A3985өД»щұҫЕдЦГІОКэЈ¬°ьАЁФЛРРөзБчЎўҙэ»ъөзБчЎўПё·ЦЎўФЛРР·ҪПтЎўјУЛЩ¶ИЎўјхЛЩ¶ИЎўФЛРРЛЩ¶ИЎўөҘіМФЛРРҫаАлөИЈ¬ХвСщЧц·ҪұгЦчіМРтөчУГЎЈ
ОӘБЛМбёЯіМРтФЛРРЛЩ¶ИЈ¬ИнјюЙијЖҪ«өзБчПё·ЦұИВК·ЦұрҙжҙўФЪSTM32өДflashЦРЈ¬өұЙПО»»ъЦё¶ЁПё·ЦөИЗэ¶Ҝ»щұҫІОКэЈ¬ПВҙпЦёБоёшЦчҝШөҘФӘЈ¬ЦчҝШөҘФӘ»б¶ФұИІйСҜЈ¬Из№ыҙжФЪҫНөчУГflashЦРөД¶ФУҰПё·ЦКэҫЭЈ¬І»ұШФцјУ¶оНвөДјЖЛгКұјдЈ¬ҙпөҪУГФцјУҙжҙўҝХјд»»ИЎјхЙЩФЛРРКұјдөДР§№ыЎЈ
НЁ№эҙ®ҝЪНЁРЕЈ¬КөПЦЙПО»»ъУлҝШЦЖЗэ¶ҜЖчөДРЕПўҪ»»ҘЎЈ
STM32ЦчТӘҝШЦЖ·ҪКҪЈә(1)ЦР¶ПІйСҜҙ®ҝЪНЁРЕРЕПўЈ¬·ЦОцРЕПўЈ¬Из№ыКХөҪЙПО»»ъУРР§ЦёБоЈ¬·ө»ШҪУКХЦёБоЈ¬ұнКҫҪУКХіЙ№ҰЈ¬·сФт·ө»Ш0XFFЈ»(2)Из№ыҪУКХіЙ№ҰЈ¬¶ФУРР§ЦёБоҪвОцЈ¬ЕдЦГЗэ¶Ҝ»щұҫІОКэЈ¬ІўФЛРР¶ФУҰөДіМРтЈ¬Зэ¶ҜІҪҪшөз»ъЎЈ
4.1 ҙ®ҝЪНЁРЕЦёБоЙијЖ
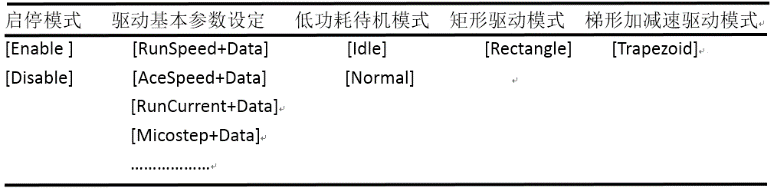
ҙ®ҝЪНЁРЕЙПО»»ъ·ўЛНЦёБоУРЈә(1)ЖфНЈДЈКҪЈ»(2)Зэ¶Ҝ»щұҫІОКэЙи¶ЁЈәФЛРРөзБчЎўҙэ»ъөзБчЎўПё·ЦЎўФЛРР·ҪПтЎўјУЛЩ¶ИЎўјхЛЩ¶ИЎўФЛРРЛЩ¶ИЎўөҘіМФЛРРҫаАлЎўНЈ¶ЩКұјдЎўНщ·өҙОКэөИЈ»(3)өН№ҰәДҙэ»ъДЈКҪЈ»ЈЁ4Ј©ҫШРОЗэ¶ҜДЈКҪЈ»ЈЁ5Ј©МЭРОјУјхЛЩЗэ¶ҜДЈКҪЎЈ
ЦёБоөД·ўЛНРӯТйТФ“[”ОӘЖрКјВлЈ¬ТФ“]”ОӘҪбКшВлЎЈЗэ¶Ҝ»щұҫІОКэЙи¶ЁЦёБоөДРӯТйФЪЗ°Гж»щҙЎЙПФцјУТ»ёц”+”К¶ұ𣬔+”З°КЗІОКэГыЈ¬”+”әуКЗКэҫЭЈ¬ИзФЛРРөзБчІОКэЦёБоОӘ[RunCurrent+Data]ЎЈөұПВО»»ъЦҙРРНкЙПО»»ъЦёБоәуФЩҙО·ө»ШҪУКХЦёБо+OKЈ¬І»іЙ№ҰҫН·ө»Ш0XFFЎЈЙПО»»ъ·ўЛНЦёБоИзұн2ЛщКҫЎЈ
ұн2 ЙПО»»ъ·ўЛНЦёБо
4.2 ҝШЦЖЖчөДҝШЦЖІЯВФ
STM32ИнјюіМРтОӘЦчҝШіМРтЎЈ
(1) STM32јмІвБ¬ҪУЈ¬іЙ№ҰБ¬ҪУәуЈ¬·ө»ШіЙ№ҰБ¬ҪУұкЦҫЎЈ
(2) ЧФ¶ҜҪ«ЖфНЈДЈКҪҙҰУЪНЈЦ№ЧҙМ¬Ј¬ҪыЦ№A3985Зэ¶ҜөҘФӘКдіцЈ¬ЗТЖБұОЦчҝШөҘФӘSTM32ОЮ№ШЦР¶ПЈ¬·АЦ№ОуҙҘ·ўЈ¬өИҙэЙПО»»ъЦёБоЎЈ
(3) ЦР¶ПІйСҜҙ®ҝЪРЕПўЈ¬јмІвөҪЙПО»»ъУРР§ЦёБоәу·ө»ШҪУКХЦёБоЈ¬·сФт·ө»Ш0XFFІў»ШөҪөЪ1ІҪЎЈ
(4) ЧФ¶ҜҙтҝӘSTM32Па№ШЦР¶ПЈ¬Ҫ«ЖфНЈДЈКҪҙҰУЪЖф¶ҜЧҙМ¬Ј¬К№ДЬA3985Зэ¶ҜөҘФӘКдіц
(5) іЙ№ҰҪУКХә󣬶ФЙПО»»ъУРР§ЦёБоҪвОцЈ¬ІўУлЙПО»»ъНЁРЕЈ¬өГөҪЗэ¶Ҝ»щұҫІОКэЈ¬Ц®әуФЩФЛРР¶ФУҰөДіМРтИзөН№ҰәДҙэ»ъДЈКҪЎўҫШРОЗэ¶ҜЎўМЭРОјУјхЛЩЗэ¶ҜЎЈ
(6) іМРтФЛРРЦБҪбКшЈ¬ФЩҙО·ө»ШҪУКХЦёБо+OKЈ¬»ШөҪөЪ3ІҪЈ¬І»іЙ№ҰҫН·ө»Ш0XFFЎЈ
ИнјюЙијЖБчіМНјИзНј8ЛщКҫЎЈ
![]()
![]()
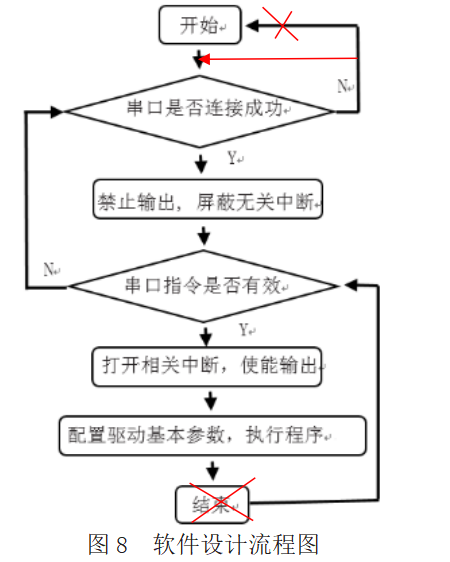
5 ҪбВЫ
НЁ№э¶ФПөНіИнУІјюҪшөчКФЈ¬ёГҝШЦЖЖчДЬЙи¶ЁөзБчҙуРЎЎўПё·ЦөИІОКэЈ¬ҝӘ»·ҝШЦЖБҪПаІҪҪшөз»ъЈ¬ВъЧгіЈјыөҘЦб¶ЁО»өДТӘЗуЎЈИұПЭЈәИИІе°Оөз»ъПЯҪУҝЪУРЙХ№ҰВК№ЬөДЗйҝціцПЦЈ»ЙПО»»ъИнјюІЩЧчІ»№»ИЛРФ»ҜЈ¬әуРш»№ҙэёДҪшЎЈ
ІОҝјОДПЧЈә
[1]Тв·Ё°лөјМе. STM32F103УўОДКэҫЭКЦІб[EB/OL]. httpЈә//www.st.com/stonline/products/literature/ds/14611.pdf.
[2]A3985-Datasheet. https://www.allegromicro.com/~/media/Files/Datasheets/A3985-Datasheet.ashx[EB/OL].
[3]ІЬұлЗ¬Ј¬іВФ¶ФцЈ¬ЛпКйУҘЈ¬өИЈ® »щУЪSTM32ІҪҪшөз»ъ¶аПё·ЦҝШЦЖЙијЖ[J]Ј®ҝЖС§јјКхУл№ӨіМЈ¬2013Ј¬13ЈЁ23Ј©Јә6894-6897Ј®
[4]ЦмилЈ¬ХЕЦРмҝЈ¬Ф¬Хс. »щУЪ STM32F103RBөДБҪПа»мәПКҪІҪҪшөз»ъПё·ЦЗэ¶ҜЖчЙијЖ[J]. өзЧУЙијЖ№ӨіМ,2012,(10):119.
[5]AN_8017. http://ww1.microchip.com/downloads/en/AppNotes/doc8017.pdf[EB/OL].
[6] AN_8017 Source Code. http://ww1.microchip.com/downloads/en/AppNotes/AVR446.zip[EB/OL].
өЪТ»ЧчХЯјтҪйЈә
СФҫьЈ¬ДР,УҰУГ№ӨіМКҰЈ¬әЈ¶ЩЦұПЯөз»ъ(іЈЦЭ)УРПЮ№«ЛҫЈ¬ҙУКВөз»ъЗэ¶ҜЙијЖј°јјКхУҰУГЎЈ
өЪ¶юЧчХЯјтҪйЈә
ЛпТгЈ¬ДРЈ¬ёЯј¶УҰУГ№ӨіМКҰЈ¬әЈ¶ЩЦұПЯөз»ъ(іЈЦЭ)УРПЮ№«ЛҫЈ¬ҙУКВөз»ъЗэ¶ҜЙијЖј°јјКхУҰУГЎЈ






№І0Мх [ІйҝҙИ«Іҝ] НшУСЖАВЫ