


关键词:永磁同步电机;电流矢量;I/F控制;负载跟随;有功功率扰动
Abstract: Aiming at the problems of the traditional open-loop I/F control method that the current amplitude is fixed, the anti-load disturbance ability is weak, and the speed is easy to fluctuate, a fast permanent magnet synchronous motor current vector closed-loop I/F control method is proposed. Based on the PMSM open-loop I/F control method, this method introduces the instantaneous active power disturbance of the motor to adjust the speed of the current vector, increases the damping torque component in the electromagnetic torque, and accelerates the speed convergence process of the motor; The model analysis under /F control calculates the power factor angle of the motor, and uses the power factor angle to adjust the amplitude of the current vector so that the given current amplitude follows the load torque. Simulation and experimental results show that the proposed fast I/F control method can significantly improve the ability of the motor to quickly follow the load, and improve the dynamic convergence characteristics and stability of the motor speed.
Keywords: PMSM; Current vector; I/F control; Load following; Active power disturbance
1 引言
永磁同步电机(以下简称为PMSM)具有功率因数高、调速范围宽、动态响应快等优点,在电气传动领域中得到了广泛的应用[1]。在对控制系统的精度、动态响应的要求不高的应用场合,例如风机,空压机等,采用V/F控制方法便可达到应用要求,并且V/F控制方法具有算法简单、性价比高、抗转速波动干扰能力强的特点。文献[2-4]将V/F控制方法应用于永磁同步电机,其中文献[2-3]利用有功功率的扰动量调节电压矢量的旋转频率、利用电机的功率因数角调节电压矢量的幅值,实现了电机的高效稳定运行。文献[4]利用电机的瞬时无功功率反馈调节电压矢量的幅值和相角,改善了系统的稳定性和鲁棒性。然而,上述V/F控制方法存在电机起动时冲击电流较大、瞬时负载转矩突变电机电流易失控的问题。
为解决上述V/F控制方法的问题,学者提出在V/F控制方法的基础之上增加电流闭环以实现对电机电流的直接控制,即后续论述的I/F控制方法。传统的开环I/F控制方法的结构框图如图1所示,而传统的开环I/F控制方法具有电机电流幅值固定,转速易波动、电机易失步的缺点。针对这些缺点,学者们也提出了相应的改进方法[5-8]。文献[5]通过电机的有功功率高频分量反馈调节电流矢量的旋转速度,增大电机的阻尼转矩分量,但控制方法中的I/F曲线是离线实验得到的,不能动态调节,不具备普适性。文献[6]针对表贴式PMSM,在开环I/F控制结构的基础上引入瞬时功率调节电流矢量的频率和幅值,提高了电机的转速收敛特性和系统稳定性,但在控制方法中采取了瞬时无功功率和电流的比值,系统可能会因此出现振荡。文献[7]通过电流矢量与转子磁链的交轴之间的夹角![]() 调节电流矢量的幅值,并使电机运行在MTPA状态,但该控制方法中对夹角
调节电流矢量的幅值,并使电机运行在MTPA状态,但该控制方法中对夹角![]() 的求取是基于稳态角度关系得到的,在频率较低时,此夹角同实际角度存在较大误差。文献[8]通过功率因数角度感知负载变化,补偿给定电流幅值,并实时补偿参考位置,电机能承受瞬时转矩冲击,并在持续大负载转矩下保持电磁转矩输出,全程无失步,但该控制方法是开环补偿调节。
的求取是基于稳态角度关系得到的,在频率较低时,此夹角同实际角度存在较大误差。文献[8]通过功率因数角度感知负载变化,补偿给定电流幅值,并实时补偿参考位置,电机能承受瞬时转矩冲击,并在持续大负载转矩下保持电磁转矩输出,全程无失步,但该控制方法是开环补偿调节。
本文在上述文献的基础上,通过对I/F控制下电机模型的分析,计算得到电机的功率因数角,利用瞬时功率因数角反馈调节电流矢量的幅值;利用瞬时有功功率的扰动量反馈调节电流矢量的频率。仿真和实验结果表明,该控制方法提高了电机电流跟随负载的快速性,改善了电机的转速收敛性和系统的稳定性,增强了电机的抗负载扰动能力。
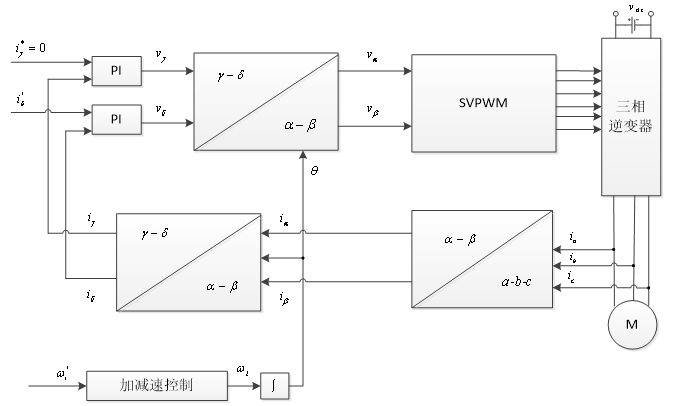
图1 传统开环I/F控制结构框图

3 快速I/F控制方案
本文在开环I/F控制方法的基础上,引入两个反馈环节,分别对电流矢量的幅值和转速进行调节。本文利用功率因数角![]() 反馈调节电流矢量幅值,使给定电流幅值能跟随负载转矩变化,增强电机的稳定性和适应能力。利用瞬时有功功率的扰动量反馈调节电流矢量的频率,增加控制系统的阻尼转矩,改善电机的转速收敛特性。其控制结构框图如图3所示。
反馈调节电流矢量幅值,使给定电流幅值能跟随负载转矩变化,增强电机的稳定性和适应能力。利用瞬时有功功率的扰动量反馈调节电流矢量的频率,增加控制系统的阻尼转矩,改善电机的转速收敛特性。其控制结构框图如图3所示。
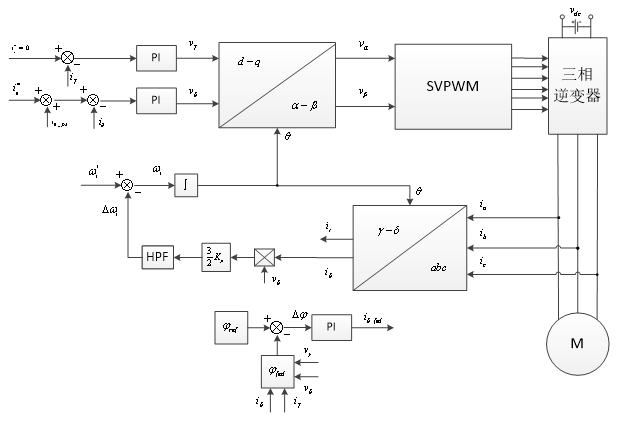
图3 快速PMSM电流矢量闭环I/F控制结构框图
3.1 电流矢量的频率反馈算法
负载的阻尼系统通常是固定不变的,当阻尼系数较小时,为改善电机的转速收敛特性,需补偿电机阻尼转矩,本文通过采取对电流矢量转速的反馈调节来增加系统的阻尼转矩分量,反馈调节的框图如图4所示。
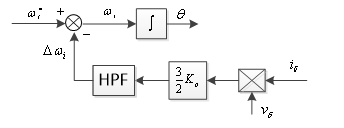
图4 电流矢量频率控制框图
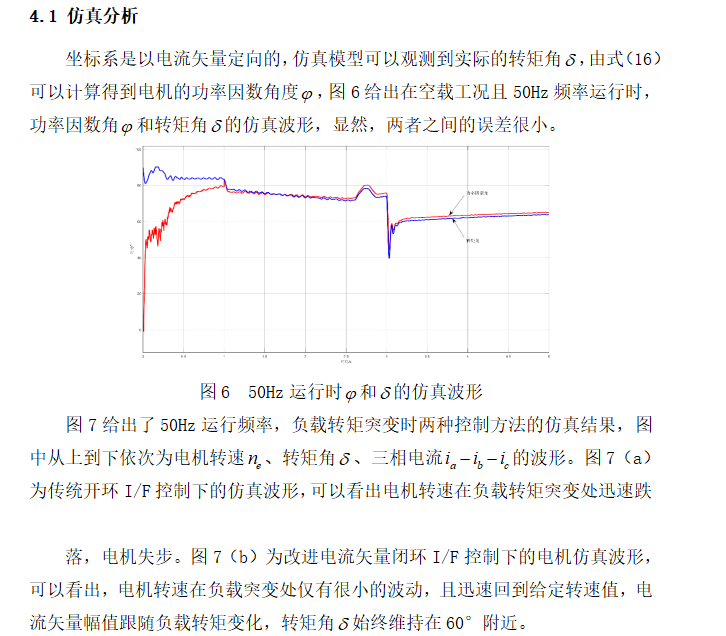
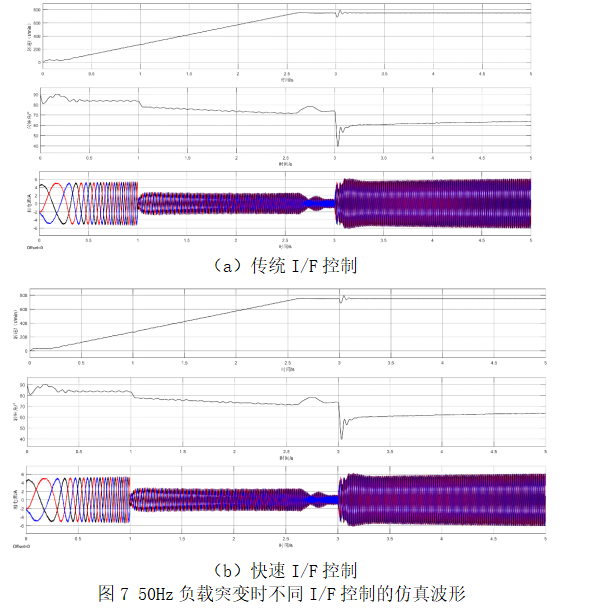
4 仿真及实验验证
为了验证本文提出的改进电流矢量闭环I/F控制方法的控制效果,在matlab/simulink仿真平台和2.4kW PMSM实验平台上进行了实验,仿真和实验采用的电机参数如表1所示。

对比分析仿真结果可知,本文提出的改进电流矢量闭环I/F控制能明显改善永磁同步电机的转速收敛性,系统的稳定性。
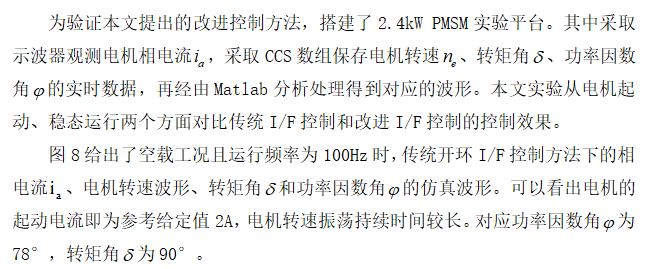
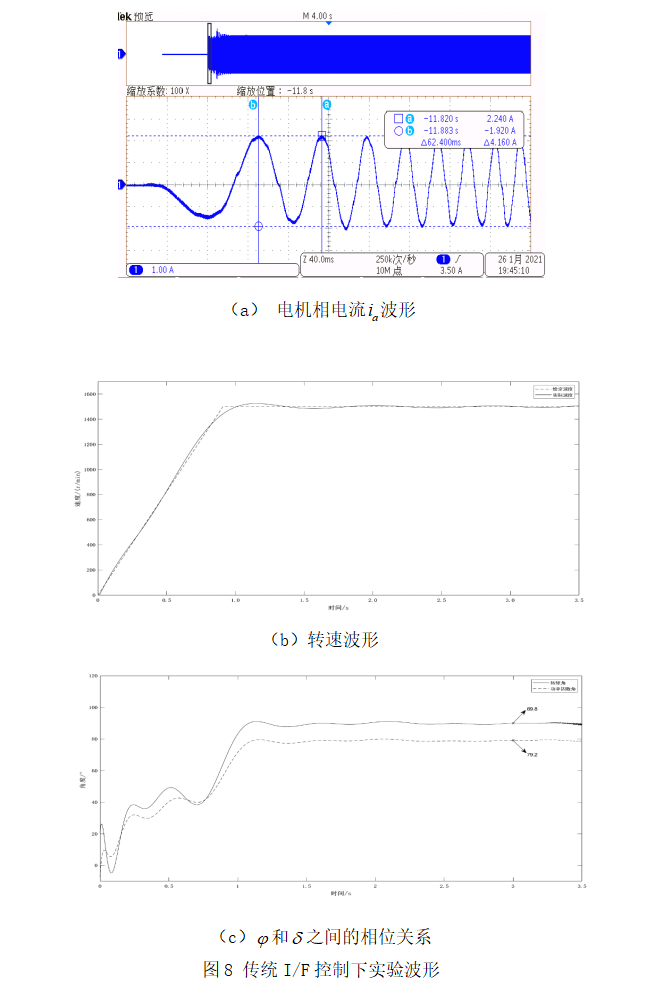
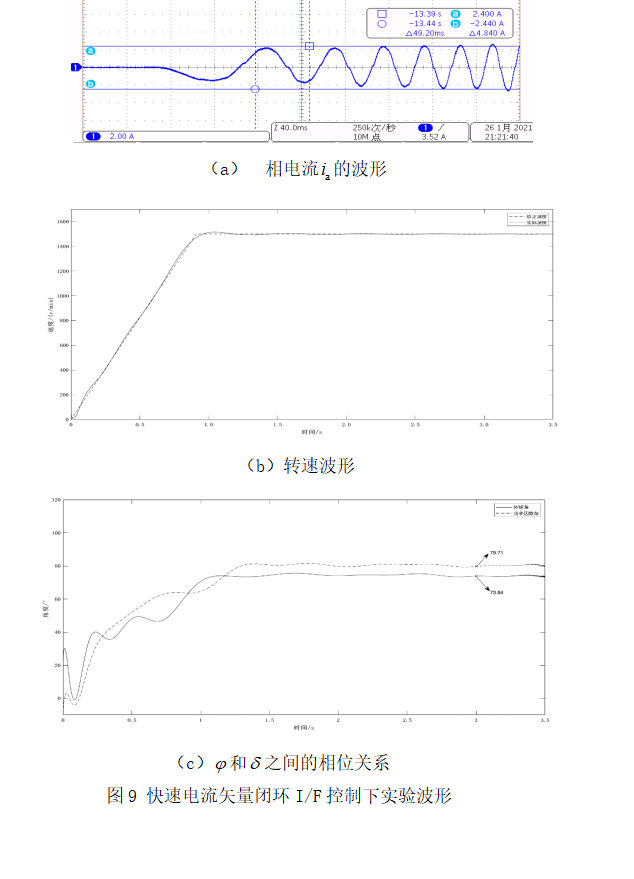
4.2 实验结果及分析


参考文献:
[1] 王宏,于泳,徐殿国.永磁同步电动机位置伺服系统[J].中国电机工程学报,2004,24(7):151-155.
[2] Perera P. D. C.,Blaabjerg F.,Pedersen J. K.,et al. A sensorless stable V/f control method for permanent magnet synchronous motor drives[J]. IEEE Transactions on Industry Applications,2003,39(3): 783-791.
[3] Ndreescu G. D.,Coman C. E.,Moldovan A,et al. Stable V/f control system with unity power factor for PMSM drives[C]. 2012 13th International Conference on Electrical and Electronic Equipment (OPTIM),Brasov,2012:432-438.
[4] Ancuti R.,Boldea I.,Andreescu G. D.Sensorless V/f control of high-speed surface permanent magnet synchronous motor drives with two novel stabilizing loops for fast dynamics and robustness[J].IET Electric Power Applications,2010,4(3):149-157.
[5] Borisavljevic A.,Polinder H.,Ferreira J. A. Realization of the I/f control method for a high- speed permanent magnet motor[C]. 2010 XIX International Conference on Electrical Machines (ICEM),Rome,2010:1-6.
[6] 王萌,杨家强,张翔,等. 一种表贴式永磁同步电机电流矢量闭环 I/f 控制方法[J]. 中国电机工程学报,2015,35(10):2513-2521.
[7] 张乘玮,沈汉林,唐其鹏,等. 一种高效的 PMSM 无位置传感器 I/f控制方法[J]. 微特电机,2017,45(10):48-52.
[8] 何志敏,马钧华. 一种永磁同步电机I/f控制的改进方法[J]. 轻工器械,2019,37(14):52-57.
联系人:程善美, 武汉市华中科技大学人工智能与自动化学院自动控制系,430074




共0条 [查看全部] 网友评论