


关键词:永磁同步电机;无差拍电流预测控制;占空比控制;滑模控制
Abstract: Aiming at the large current ripple in the predictive control of permanent magnet synchronous motors, the optimal duty cycle predictive control algorithm is used to improve the method. Compared with the duty cycle predictive control, the method is improved from global prediction, using the evaluation function to the effective voltage vector and duty cycle The optimal combination is selected to ensure that the final applied voltage vector is globally optimal, and the optimal duty cycle control algorithm is optimized and improved. Finally, the PI control of the speed is replaced by the sliding mode approach rate control. The simulation results show that the proposed optimization has obvious suppression of the current ripple and the speed control also has good performance.
Key words: Permanent magnet synchronous motor; Dead-beat predictive current control;optimal duty cycle control;sliding mode control
1 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有效率高、可靠性高、功率密度大等优势,在电动汽车、风电等领域得到了广泛应用[1]。由于PMSM是一个多变量,非线性,强耦合系统,对于系统扰动较为敏感,通常采用磁场定向控制方法来实现d-q轴解耦进行控制,以便其获得与直流电机相接近的控制性能[2]。其中电流环的控制对整体的性能起着至关重要的作用,工业控制中对电机控制性能要求日益提高,传统的PI控制已经不能满足控制要求。
随着半导体和计算机软、硬件技术的进一步发展,很多先进的控制方法开始应用于PMSM控制系统中。如:模型参考自适应控制[3],模糊控制[4],神经网络控制[5],滑模控制[6]和预测控制[7-9]等。文献[10-12]是针对占空比预测控制的控制方法,验证占空比预测控制的控制策略优点。文献[13-14]对转速环进行滑模控制改进控制的研究,控制效果较PI控制有一定改进。预测控制中,无差拍电流预测控制采用SVPWM调制,具有较小的电流波纹和较好的电流动态特性,成为研究热点。
本文在d-q坐标系下,根据永磁同步电机和逆变器的数学模型以及无差拍控制思想,对电流环进行最优占空比交轴无差拍模型预测电流控制优化;对速度环进行了基于趋近率的滑模控制器改进,从局部到整体皆提高调速系统性能,并对系统延时进行了补偿,最后通过仿真实验验证了方案的可行性与有效性。
2 电流预测控制
为了便于分析,假设磁路不饱和,磁场在空间呈正弦分布,不计磁滞及涡流损耗,在d-q坐标系下
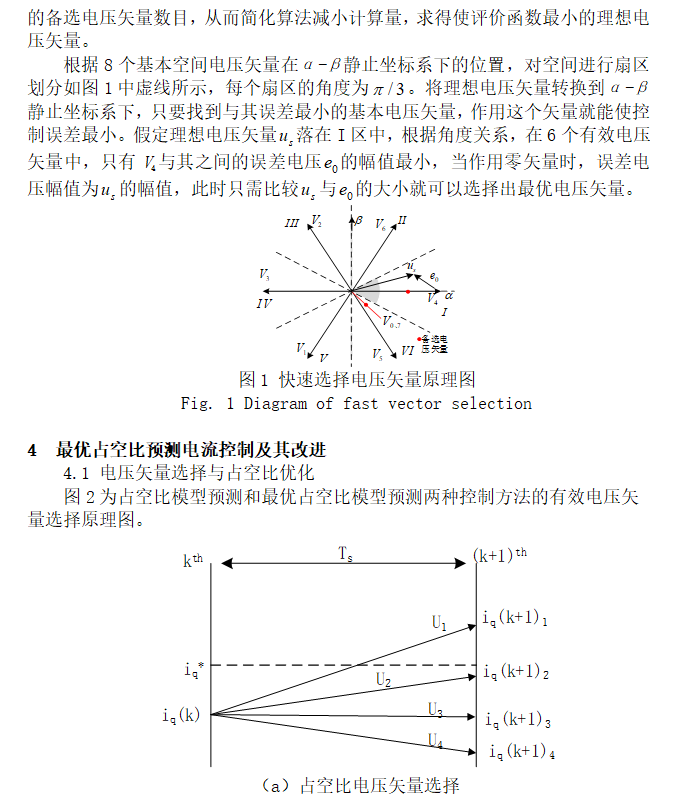


如图2(b)所示,最优占空比模型预测电流控制先计算出每个有效矢量的占空比,在使用价值函数评估优化的同时也考虑了电压矢量和占空比的混合作用效果,故采用的最优有效矢量为U1,既保证了选择的电压矢量为全局最优,又实现了q 轴电流无差拍控制。由此可知,与占空比模型预测电流控制相比,最优占空比模型预测电流控制由于同时优化了电压矢量和占空比,可以在相同的条件下选择更加准确的有效矢量进行输出。
与此同时,由于在占空比模型预测控制和本节所用的最优占空比模型预测控制中几乎每个采样周期中都有零电压矢量作用,如果价值函数选择出来的最优电压矢量是零电压矢量,则后续的占空比控制则没有意义,零电压矢量为有效矢量,作用于整个周期,算法冗余。因此,本文在进行有效电压矢量选择时不需要考虑零矢量。
4.2 价值函数
MPCC策略的控制目标是使交直轴电流可以准确跟踪给定值,故选取价值函数如下:
![]() (9)
(9)
4.3 基于SVM的最优占空比MPCC原理改进
基于SVM的最优占空比MPCC方法系统框图如图3所示。
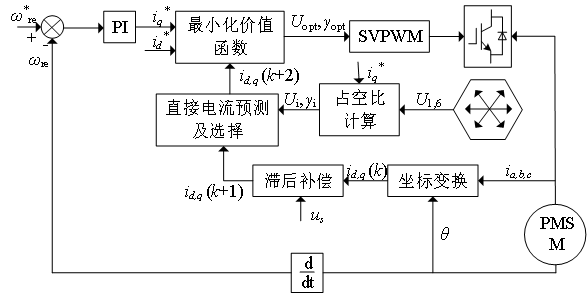
图3 基于SVM的最优占空比MPCC方法系统框图
基于SVM的最优占空比MPCC改进方法如下:
1) 根据快速矢量选择法,确定中间矢量。
2) 计算中间矢量及其上下2个有效电压矢量的占空比。
3) 预测有效电压矢量与零矢量组合作用后的电流值,带入评估函数。
4) 比较3个评估值,选择最优电压矢量与占空比,最后将其通过SVM来实现。
此改进方法从7次遍历预测计算降低为3次预测电压矢量计算,较为有效地降低了计算量。
5 算法仿真分析

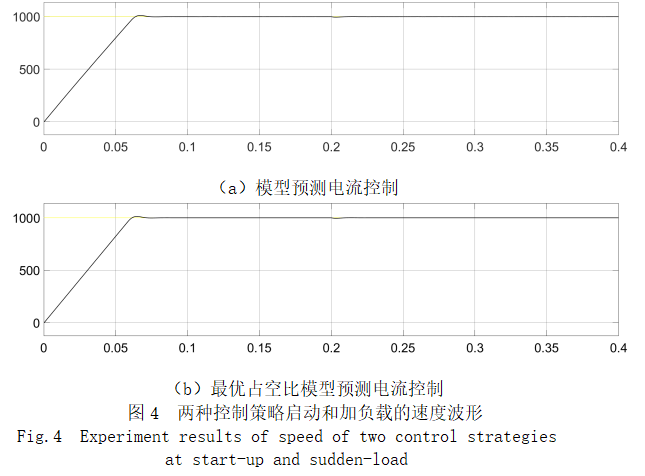
仿真(一)动态控制效果
对两种控制策略的转速对比,转速环都采用基于趋近率的滑模控制,并且使用相同的参数,由下图可得,动态响应基本一致,启动转速超调小,负载波动后转速可以及时回调。
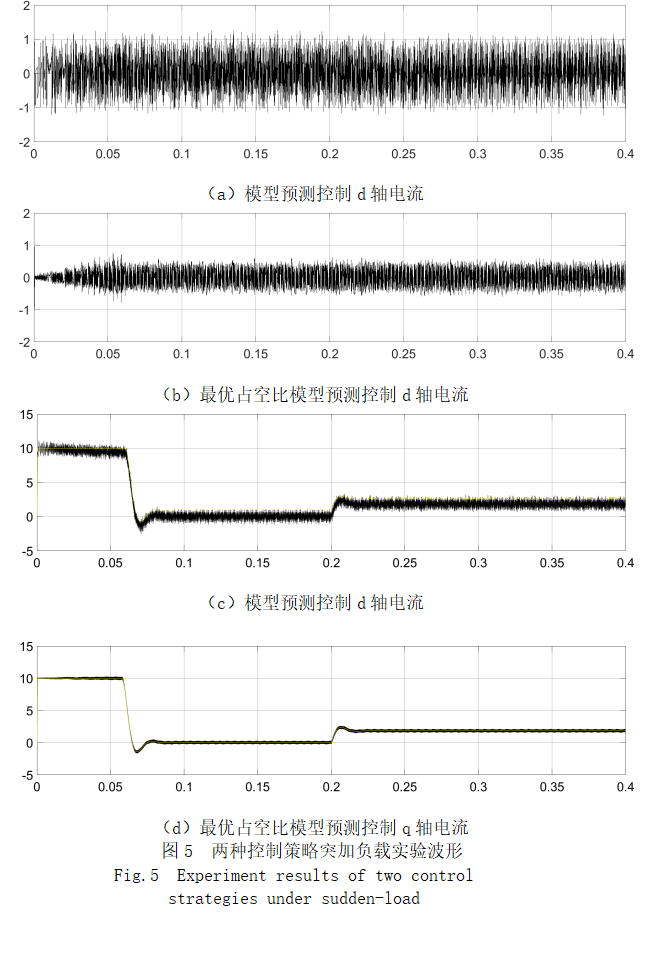
对交-直轴电流进行对比分析,为了保证控制效果严谨,转速环皆采用滑模控制,并且使用相同的参数。由5图可得,最优占空比控制的电流交直轴脉动有效降低。直轴电流脉动从±1降低为±0.4,交轴电流脉动从±0.9降低为±0.3。
6 结束语
本文针对永磁同步电机模型预测控制电流脉动和转速性能进行改进,建立了模型预测控制和最优占空比模型预测控制策略的永磁同步电机数学模型,并进行仿真。仿真结果表明,本文所用控制策略中交直轴的电流有了较明显的脉动抑制且滑模速度控制具有较为良好的控制性能,整体控制效果提升,验证本文控制策略。
参考文献:
[1]EHASAN I M,GAO Y M,EMADI A. 倪光正,倪培宏,熊素铭,译.现代电动汽车、混合动力电动汽车和燃料电池车—基本原理、理论和设计[M].北京:机械工业出版社,2012.
[2]刘京,李洪文,邓永停. 基于扰动观测器的永磁同步电机电流环自适应滑模控制[J].光学精密工程,2017,25(5):1229-1241.
[3]王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学报,2014,34(6):889-902.
[4]LEU V Q,CHOI H H ,JUNG J W. Fuzzy sliding mode speed controller for PMSM with a load torque observer[J]. IEEE Transactions on Power Electronics, 2012,27(3):1530-1539
[5]EL SOUSY F F M. Intelligent mixed H2/H![]() adaptive tracking control system design using self-organizing recurrent fuzzy-wavelet-neural-network for uncertain two-axis motion control system[J]. Applied soft computing,2016,41:22-50.
adaptive tracking control system design using self-organizing recurrent fuzzy-wavelet-neural-network for uncertain two-axis motion control system[J]. Applied soft computing,2016,41:22-50.
[6]夏长亮,刘均华,俞卫,等.基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J]. 中国电机工程学报,2006,26(20):139-143.
[7]牛里,杨明,刘可述.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137.
[8]王宏佳,徐殿国,杨明.永磁同步电机改进无差拍电流预测控制[J].电工技术学报,2011,26(6):39-45.
[9]牛里,杨明,王庚,徐殿国. 基于无差拍控制的永磁同步电机鲁棒电流控制算法研究[J]. 中国电机工程学报,2013,33(5):78-85.
[10] Cortes P,Rodriguez J,Silva C,et al. Delay Compensation in Model Predictive Current Control of a Three-phase Inverter[J]. IEEE Trans. Ind. Electron,2012,59(2):1323-1325.
[11]Morel F,Lin-Shi X,Rétif J,et al. A Comparative Study of Predictive Current Control Schemes for a Permanent-magnet Synchronous Machine Drive[J].IEEE Trans. Ind. Electron,2009,56(7):2715-2728.
[12]Zhang Y,Yang H. Model Predictive Torque Control of Induction Motor Drives with Optimal Duty Cycle Control[J]. IEEE Trans on Power Electron,2014,29(12):6593-6603.
[13]袁雷,沈建清,肖飞,等.插入式永磁低速同步电机非奇异终端滑模观测器设计[J].物理学报.2013,62(3):030501.
[14]张晓光,赵克,孙力,等.永磁同步电动机滑模变结构调速系统新型趋近率控制[J].中国电机工程学报,2011,31(24):77-82.
作者简介:
广开元 出生年份:1995 男 大连交通大学 电气信息学院 主要研究方向:电机驱动及其控制




共0条 [查看全部] 网友评论