


关键词:滑模控制;永磁同步电机;直接转矩控制;速度控制器
Abstract: The direct torque control system of permanent magnet synchronous motor based on super twisting sliding mode speed controller is designed, and the influence of parameter change on the output characteristics of the system is simulated. The analysis results show that the direct torque control system of permanent magnet synchronous motor based on super twisting sliding mode speed controller has stronger robustness than that of the direct torque control system of permanent magnet synchronous motor with PI direct torque control.
Keywords: Sliding mode control; Permanent magnet synchronous motor; Direct torque control; Direct torque control
1 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)拥有结构简单、体积小、损耗小、响应速度快、输出转矩大以及调速范围广等特点,在机器人、航空航天等工业领域受到了极为广泛的应用[1-3]。
受温升效应、磁路饱和影响,永磁电机定子电阻和交、直轴电感在电机运行时发生变化。永磁体磁链等参数会影响PI控制器参数选取,采用PI速度控制器的控制系统鲁棒性较弱[4]。设计出一种改进型的滑模变结构速度控制器,变指数趋近律的引入,让系统以变速和指数两种速率实时趋近滑模面,抑制了状态变量的超调,提高了系统的鲁棒性[5]。设计出一种以转速和负载转矩为观测对象的扩展滑模观测器,该观测器可准确地观测负载转矩,采用的前馈补偿方案对系统负载扰动及转动惯量摄动有较强的鲁棒性[6]。采用电压-磁链外环Super-twisting控制与电流内环含K类函数直接反馈线性化控制相结合的方法,给出一种基于电压空间矢量调制的异步发电系统直接转矩控制新方法[7]。采用自适应Super-twisting算法的滑模控制律,解决电压源逆变器系统中负载扰动和参数摄动问题[8]。采用一种基于二阶滑模的方法来对永磁同步电机的直接转矩控制进行优化[9-10]。
考虑电机内部参数变化问题,滑模控制对系统参数要求不高,鲁棒性强等特点。本文引入Super-twisting滑模控制算法对速度环控制器进行设计,减小了电机内部参数摄动对转速控制的影响,增强了控制系统的鲁棒性,改善了永磁同步电机直接转矩控制系统的动态特性。
2 Super-twisting滑模控制原理
传统滑模控制由于不连续的控制系统作用在滑模变量的一阶微分上从而造成了抖振现象。高阶滑模控制将不连续的切换控制放在了积分上,所以高阶滑模的控制律是连续的,能够避免传统一阶滑模造成的抖振现象。高阶滑模设计中需要滑模变量的导数信息,这部分信息很难获取,一定程度上限制了高阶滑模的发展[11]。本文引入的一种Super-twisting滑模控制方案,不需要获取滑模导数信息。此种控制方案是一种二阶滑模变结构控制方案,它不仅保持了二阶滑模控制律的连续及滑模变量和滑模变量导数都能收敛到平衡状态的优点,而且避免了普通二阶滑模需要获取滑模变量导数信息的缺陷。
Super-twisting滑模控制在相平面上的移动轨迹渐近收敛于原点,在滑模面附近控制量收敛到等效控制从而避免抖振[12]。
含扰动项的Super-twisting算法的一般形式为:
3.2 Super-twisting滑模直接转矩控制设计
目前,基于Super-twisting滑模控制技术应用于PMSM直接转矩控制系统中,设计成Super-twisting滑模控制器应用于转矩与磁链的控制中[13-14]。本文设计Super-twisting滑模控制器来实现系统的转速控制,提升控制系统的鲁棒性。
在二阶滑模控制规律中,Super-twisting算法在无需滑模导数信息的情况下,能够使系统在有限时间内围绕原点螺旋式旋转,最后到达原点。
为了得到磁链控制器表达式,将磁链的滑模面控制函数定义成为:
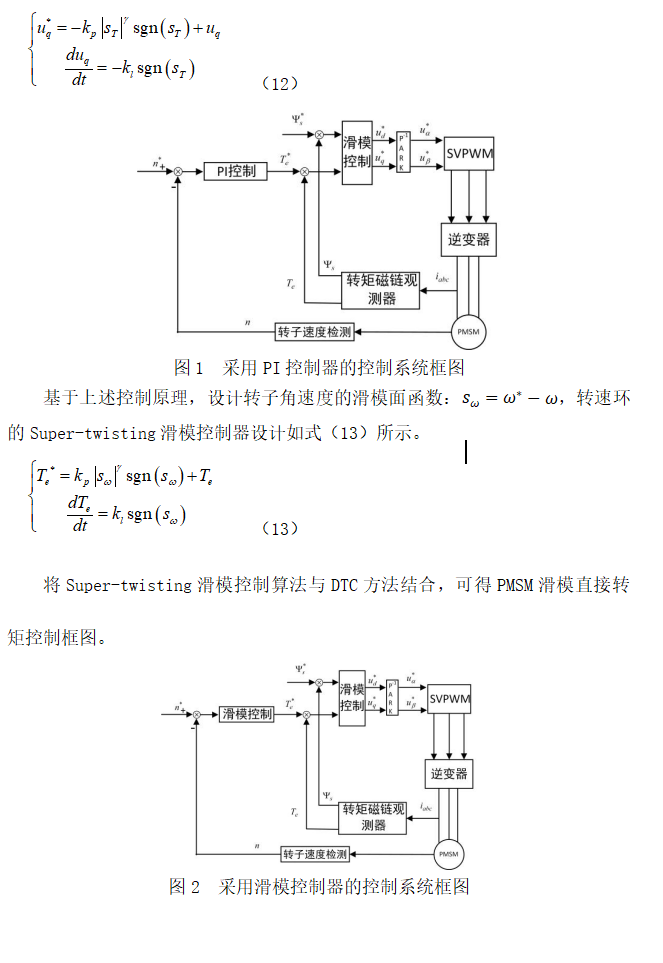
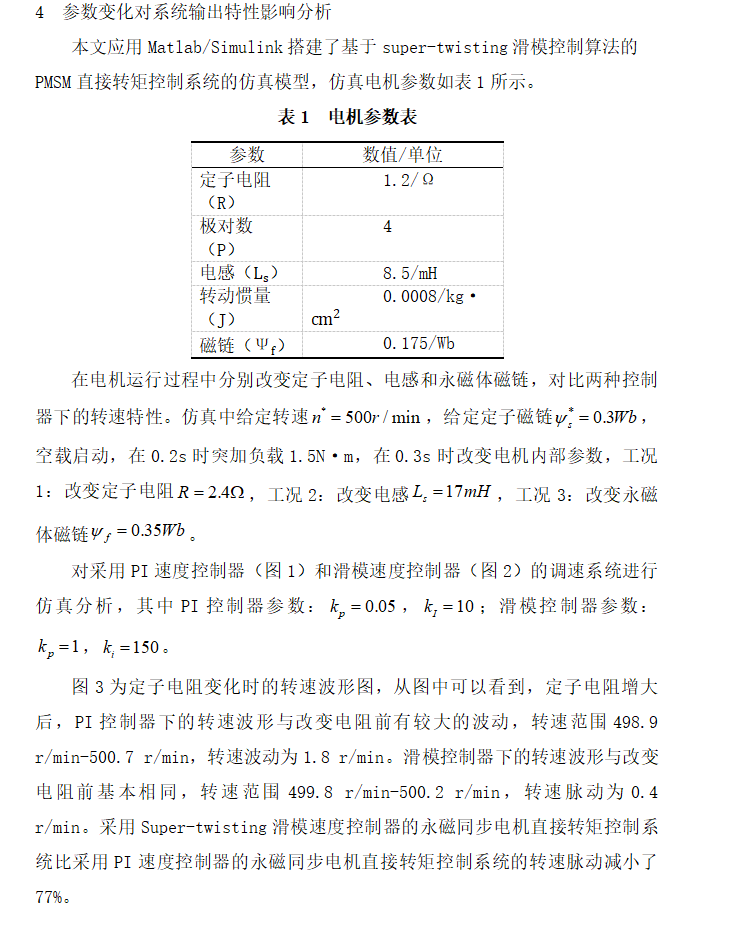
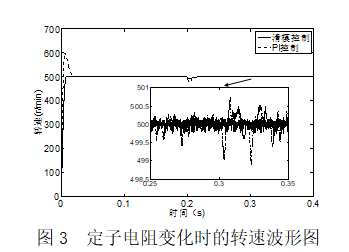
图4为电感变化时的转速波形图,从图中可以看到,电感增大后,两种控制器都出现了周期震荡现象,震荡周期相同,震荡幅值不同。PI控制器下的转速幅值为500.4 r/min,滑模控制器下的转速幅值为500.2 r/min。采用Super-twisting滑模速度控制器的永磁同步电机直接转矩控制系统比采用PI速度控制器的永磁同步电机直接转矩控制系统的转速震荡幅值减小了一半。
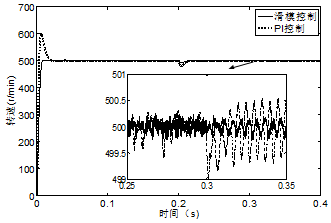
图4 电感变化时的转速波形图
图5为永磁体磁链变化时的转速波形图,从图中可以看到,永磁体磁链增大后,两种控制器都出现了抖振增幅现象。PI控制器下的转速波形与改变磁链前有较大的波动,转速范围在499.4 r/min-500.6 r/min,转速波动为1.2 r/min。滑模控制器下的转速波形与改变磁链前有较小的波动,转速范围499.6 r/min-500.4 r/min,转速波动为0.8 r/min。采用Super-twisting滑模速度控制器的永磁同步电机直接转矩控制系统比采用PI速度控制器的永磁同步电机直接转矩控制系统的转速抖振减小了33%。
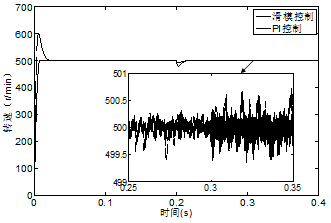
图5 永磁体磁链变化时的转速波形图
观察图3-图5,0.2s时加入负载,两种控制器都能够准确、快速跟踪给定转速。0.3s时改变电机参数后,两种控制器也都能控制转速收敛到给定值附近。经以上分析表明,采用了基于Super-twisting滑模控制算法的速度控制器受电机参数变化影响小,提升了控制系统鲁棒性。
5 结论
为了减小电机内部参数摄动对控制系统的影响,本文将Super-twisting滑模控制算法引入直接转矩控制中,设计了滑模速度控制器取代了PI控制器。仿真分析了参数变化对系统输出特性的影响,分析结果表明本文设计的滑模速度控制器在定子电阻、电感和永磁体磁链变化的情况下,能够准确跟踪给定转速,提升了系统鲁棒性,提高了系统在复杂情况下的控制性能。
参考文献:
[1] 贾洪平,孙丹,贺益康.基于滑模变结构的永磁同步电机直接转矩控制[J].中国电机工程学报,2006(20):134-138.
[2] 厉虹,韩晔,王久和. 改进的永磁同步电机直接转矩控制系统研究[J]. 电气传动, 2017,47(11):9-15.
[3] 孙旭霞,高沁源,孙伟.基于SVPWM的永磁同步电机直接转矩控制系统[J].电气传动, 2016,46(11):3-6.
[4] 王亮,朱臻赜,马跃江,孙树才,黄茂森.系统参数变化对同步电机性能影响的研究[J].微特电机, 2014,42(09):33-35.
[5] 刘畅,赵凯旋,牛青.关于永磁同步电机速度特性鲁棒性控制研究[J].计算机仿真, 2019,36(07):277-281.
[6] 张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报, 2012,32(03):111-116+8.
[7] 谷志锋,孙晓云,葛孟超,刘文康,单锁兰,李宏城.直接转矩Super-Twisting滑模异步发电控制[J]. 高电压技术,2020,46(08):2760-2768.
[8] 滕青芳,佐俊,潘浩,徐睿琦. 基于时变增益扩张状态观测器的逆变器系统自适应super-twisting电压鲁棒控制[J]. 控制理论与应用, 2020,37(09):1880-1894..
[9] 胡宇,董绍江,蔡巍巍,江松秦.基于二阶滑模算法的永磁同步电机直接转矩控制研究[J].组合机床与自动化加工技术,2019(06):86-89.
[10] 王凯东,张超.基于二阶滑模算法的永磁电机直接转矩控制[J].电机与控制应用, 2019,46(06):33-37+54.
[11] Constant switching frequency based direct torque control of interior permanent magnet synchronous motors with reduced ripples and fast torque dynamics. Foo G.H.B,Zhang X. IEEE Transactions on Power Electronics, 2016
[12] Optimal Designing of Permanent Magnet Cavity to Reduce Iron Loss of Interior Permanent Magnet Machine. Xia C, Guo L, Zhang Z, et al. IEEE Transactions on Magnetics, 2015
[13] 葛如愿,邓福军.基于super-twisting滑模的永磁同步电机转矩环控制器设计[J].微电机, 2018,51(02):51-55+68.
[14] 万东灵,赵朝会,王飞宇,孙强.基于Super-twisting滑模永磁同步电机驱动的转速和转矩控制[J].电机与控制应用,2017,44(10):42-47.




共0条 [查看全部] 网友评论