



关键字:开关磁阻电机;无位置传感器:滑模观测器法
Abstract: Switched reluctance motor because of its simple structure, reliable performance, the advantages of good performance of speed adjustment, has a broad prospect in many fields. In order to get a good motor control performance, accurate rotor position information acquisition is indispensable. But the existence of position sensor increases the complexity of the system, and reduce the reliability of the system. In this paper, by constructing the second-order sliding mode observer, using the motor feedback of voltage, current value to estimate the rotor speed and position, and has carried on the simulation, the results prove the feasibility of the method.
Key words: Switched reluctance motor; Sensorless; Sliding mode observer method
1 引言
开关磁阻电机(Switched Reluctance Motor, SRM)是一种先进的机电一体化装置,具有结构简单、工作可靠、造价低廉、调速范围广等优点,在实际生产过程中受到广泛关注。开关磁阻电机调速系统主要由开关磁阻电机、功率变换器、控制器及位置检测器等组成。其中位置检测器是实现电机调速系统的主要检测模块,传统的检测方法是通过各类传感器来获得转子的位置信息。传感器的安装使用增加了系统成本和复杂程度,降低了系统的坚固性和可靠性,因此无位置传感器控制成为SRM控制系统的研究热点。
2 SRM数学模型
SRM在实际运行中的磁路是饱和的,绕组电感实际上是与转子位置角![]() 和相电流
和相电流![]() 有关的非线性函数。利用有限元法对SRM进行磁路分析计算的基础上,可以得到SRM的状态方程为:
有关的非线性函数。利用有限元法对SRM进行磁路分析计算的基础上,可以得到SRM的状态方程为: 
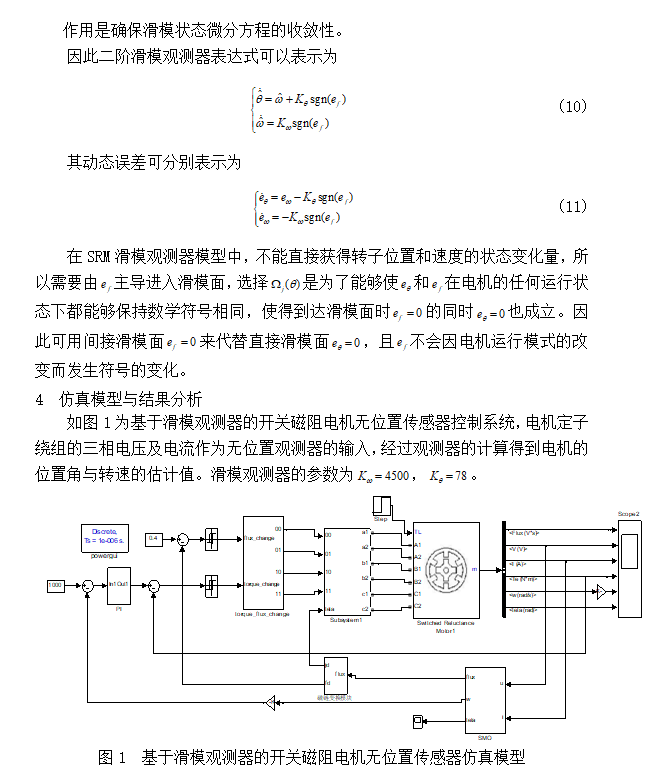
(1)空载启动
在仿真模型中,电机空载启动的给定转速为1000r/min。启动过程的仿真结果如图2所示。
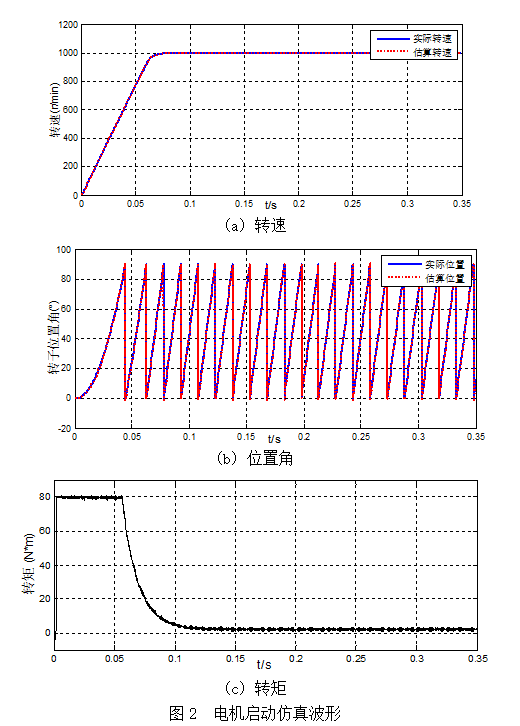
从图2电机空载启动过程的仿真波形图可知,电机启动后,电机控制系统的实际转速和估算转速能够同时变化上升,并大约在0.08s时到达系统给定的速度参考值1000r/min,估算转速能够满足电机正常运行的要求。电机转子位置角的估算值和实际值基本能够保持变化一致,且在滑模观测器无位置传感器电机控制系统下,电机的输出转矩波形变化平稳,满足系统运行的要求,这说明了本文建立的滑模观测器无位置控制系统的可行性。
(2)突加负载
电机空载启动后,在0.2s对系统施加大小为5N·m的负载转矩,仿真波形如图3所示。

图3为无位置传控制系统负载发生变化的仿真波形。从图中可以看出转矩、转速的变化在转矩变化时估算的位置角没有出现明显波形,说明了本文所建的无位置传感器控制系统的有效性。
5 结论
通过对基于滑模观测器的位置估算法,本文构建了滑膜观测器对开关磁阻电子的转子位置进行估算,从而构建了无位置传感器控制系统,并通过在Matalab/Sumilink中对其进行仿真验证,研究结果表明,这种算法能够实现对SRM转子位置的估算,并对系统的动态性能,抗扰动能力进行仿真,结果表明系统动态性能,抗扰动能力良好。
参考文献:
[1] 张旭隆,谭国俊,蒯松岩,等. 基于滑模观测器的开关磁阻电机无位置传感器控制[J]. 电力电子, 2009(5):25-28.
[2] 崔延光. 基于滑模观测器的开关磁阻电机控制系统[D]. 哈尔滨理工大学,2013
[3] 辛凯,詹琼华. 基于滑模观测器的开关磁阻电动机间接位置检测技术研究[J]. 微电机,2007, 40(9):9-13.
[4] Khalil A, Underwood S, Husain I, et al. Four-Quadrant Pulse Injection and Sliding-Mode-Observer-Based Sensorless Operation of a Switched Reluctance Machine Over Entire Speed Range Including Zero Speed[J]. Industry Applications, IEEE Transactions on,2007,43(3):714-723.
[5] 陈海进,高宏峰.朱益民,等. 开关磁阻电动机滑模位置观测器优化设计研究[J]. 微电机,2011,44( 4) : 42-46.
作者简介:
邢旭(1991.10-),男,助理工程师,






共0条 [查看全部] 网友评论