


关键字:永磁同步电机;iMOTION;矢量控制;无速度传感器
Abstract: Infineon iMOTION modular application design kit (MADK) provides modular and scalable drive control system solutions, covering motor drive applications from 20W to 11kw. Based on the simulation and analysis of traditional PMSM generator system with MATLAB/Simulink, a 400W sensorless vector control PMSM generator traditional system is realized by using iMOTION modular application program. The design process and experimental results show that iMOTION application design has strong flexibility and scalability, and can reduce the cost of evaluation and development Lower, which is applicable for teaching demonstrations and teaching experiments.
Key words: Permanent magnet synchronous machine (PMSM); iMOTION; Vector control; Speed sensorless
1 引言
永磁同步电机(PMSM)具有非常好的电气性能指标,而且结构简单和成本低廉,广泛地应用于家电、伺服驱动和工业驱动领域。PMSM可分为表贴式永磁同步电机(SPMSM)和内置式永磁同步电机(IPMSM)。PMSM调速控制对转子位置非常敏感,转子位置检测可采用旋转变压器和光电编码器,转子无位置测算方法包括[1~5]:(1)适合较高速基于基波数学模型法;(2)适合零低速IPMSM的旋转高频电压信号注入法和(3)适合零低速IPMSM和SPMSM的高频脉振电压信号注入法。随着相关技术的发展,矢量控制(VC)技术已经成为PMSM调速控制的主流技术,但是矢量控制软件编程必须适合具体PMSM参数,因而对包括SVPWM调制策略、矢量控制调速策略以及PID控制理论在内的控制程序验证来说是,整个过程非常复杂和耗时。对新品的一次开发来说,更是如此。对于新研发的PMSM或控制系统,需要长时间不断电的运行测试,因而也会产生大量的能耗。如果将两台PMSM并轴构成机组,一台工作在电动状态,另一台工作在发电状态,并将两台电压源逆变器(VSI)的直流母线直接相连,则构成PMSM-PMSG并轴对拖测试平台,可以明显地节省能量[6~9]。iMOTION[10~11]为英飞凌研发的模块化应用程序设计工具包(MADK),可以用于20W~11kW的PMSM传动。本文在分析iMOTION PMSM无速度传感器控制技术基础上,对PMSM-PMSG并轴对拖系统进行仿真分析,并搭建400W并轴对拖系统,验证iMOTION的灵活性和可扩展性。
2 PMSM-PMSG并轴传动原理
2.1 PMSM数学模型
对于测速发电机、旋转变压器、测速码盘等高精度速度传感器,由于价格昂贵、抗电磁干扰能力差以及存在安装问题,不适合应用于家用电器以及某些电动汽车等场合。对于中高速应用场合,反电动势幅值较高,可以采用基于基波数学模型的PMSM无传感器控制技术进行转子位置和速度估算,具体方法有滑模观测器法、模型参考自适应法、扩展卡尔曼滤波法等。
PMSM本身是一个多变量、强耦合的复杂非线性电磁转换系统,为了实现PMSM的准确控制,必须对其进行合适的数学建模[12~14]。为简化分析,假设PMSM为理想电机,即满足以下条件:不考虑电机铁芯的磁饱和;不考虑电机的涡流和磁滞损耗;电机定子结构三相完全对称,转子永磁体磁场在气隙中分布为理想正弦波;永磁体的磁导率与空气磁导率完全相等。
PMSM包括三相静止、两相静止、两相旋转坐标系,各自包含一组电压方程、定子磁链方程、电磁转矩方程和机械运动方程。


在静止坐标系下,基于定子磁链定向转子相角观测的PMSM无位置传感器控制系统如图1所示,通过定子电压与电流计算得到定子绕组磁链,得到转子相角观测值与幅值,即可以得到同步角速度估算值,采用速度外环,PMSM工作在电动状态。
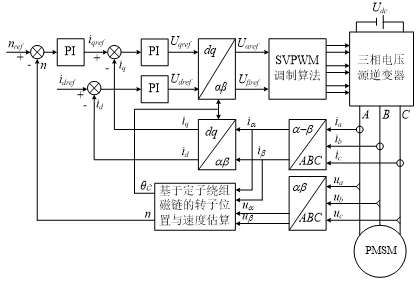
图1 基于定子 绕组磁链PMSM无位置传感器控制系统
2.2 机械轴模型
当两台PMSM并轴构成机组时,一个工作在电动状态,采用转速外环,另一个工作在发电状态,采用转矩外环,两台电压源逆变器直流母线直接相连,则构成PMSM-PMSG并轴对拖测试平台,如图2所示。
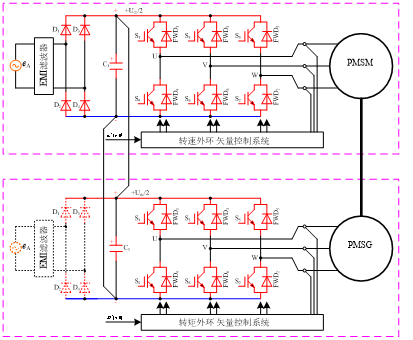
图2 PMSM-PMSG并轴构成机组框图
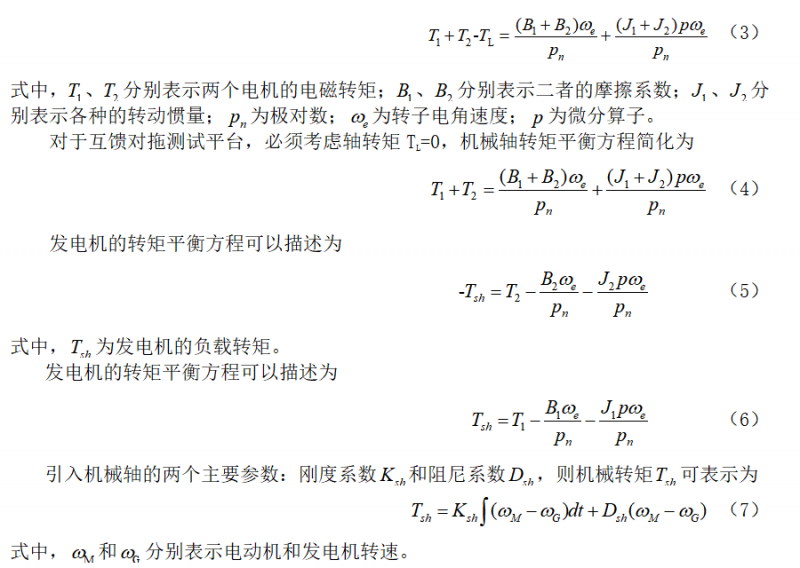
对于双电机并轴结构,忽略两轴端转速的动态差,根据牛顿力学定律可以得到电动机—发电机并轴拖动时机械轴转矩平衡方程为[8]
3 PMSM-PMSG并轴传动仿真
仿真电机的主要参数如表1所示,在MATLAB/Simulink环境下建立如图3所示的矢量控制的PMSM-PMSG并轴仿真模型整个系统由单相功率因数校正器供电,完成了仿真验证。
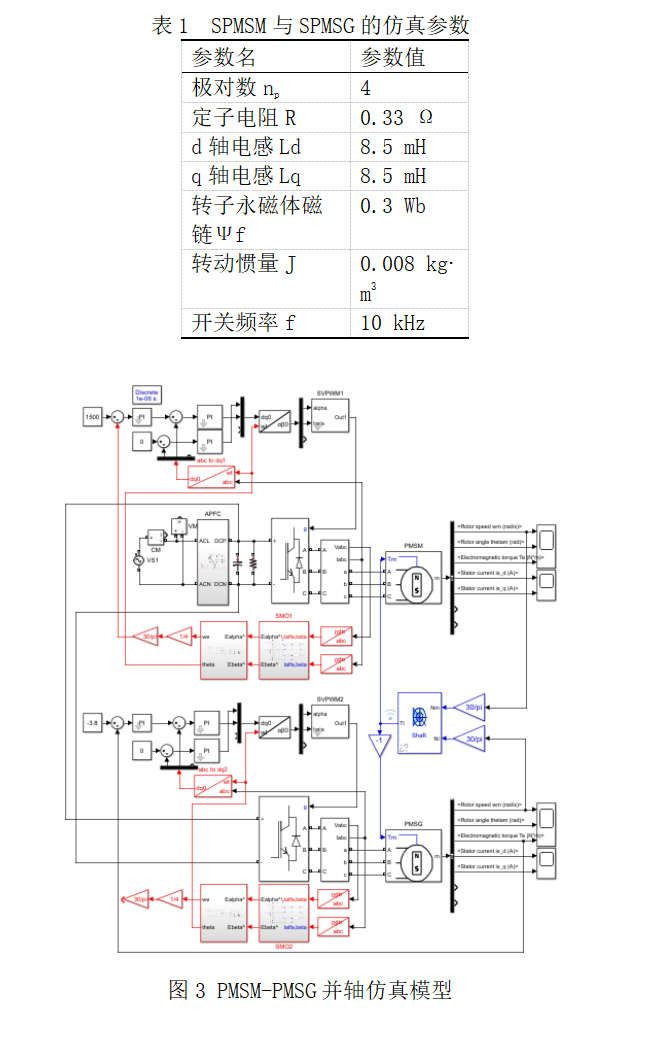
图4为单相交流电源的电压与电流仿真波形,可见整个系统运行时补偿的能量较小。PMSM转子位置、转速与转矩仿真波形如图5所示,PMSM定子绕组d-q轴电流仿真波形如图6所示。PMSG转子位置、转速与转矩仿真波形如图7所示,PMSG定子绕组d-q轴电流仿真波形如图8所示。
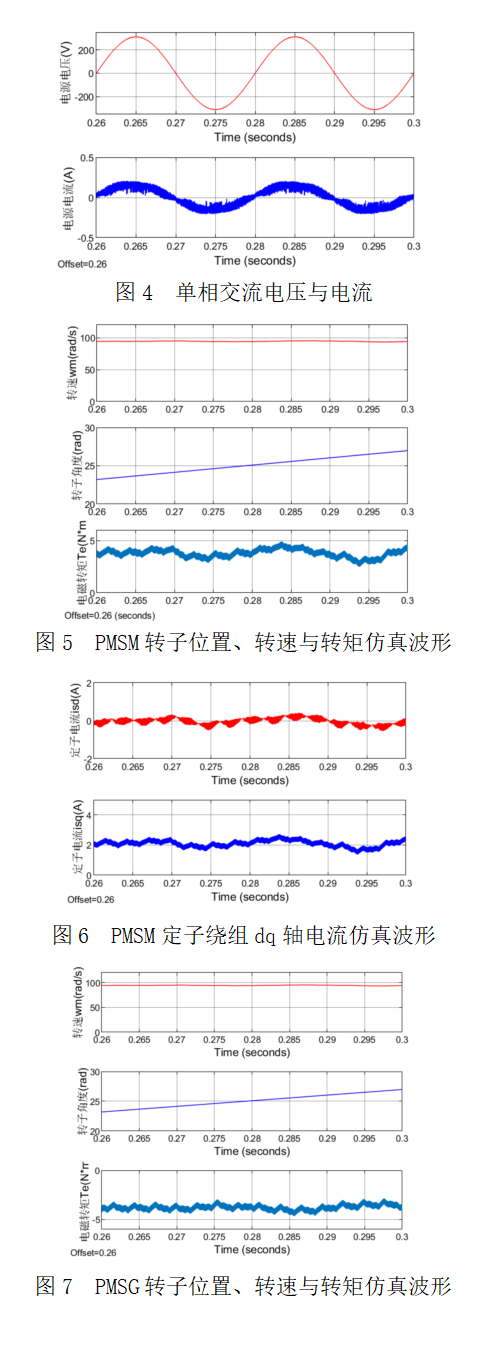
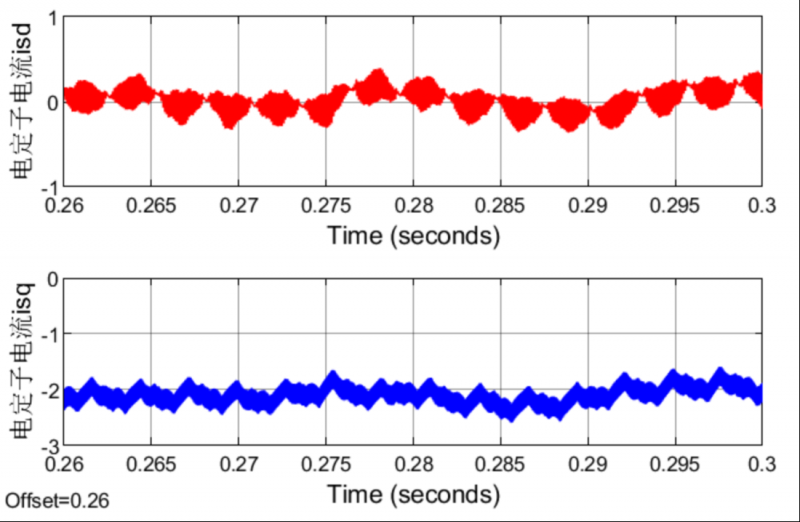
图8 PMSG定子绕组dq轴电流仿真波形
4 PMSM-PMSG并轴传动实验
英飞凌提供有完整的iMOTION™ MADK评估板,涉及功率等级20W~11kW,电压等级250V~1200V。该平台具有不同的控制板选项和一系列电源板。可选支持PFC功能,控制板与功率板构成标准评估平台,其接线如图9所示。

图9 MADK评估系统接线
英飞凌提供有配套开发环境iMOTION2.0\ MCEDesigner_V2.3,用户可以很方便地设置电机参数和机组运行参数。为实现PMSM-PMSG并轴传动,需要两台电脑同时安装和运行该开发环境。
实验电机参数如表2所示,采用400W PMSM-PMSG并轴传动系统和两套基于iMOTION模块化设计应用包(MADK)以及相应的驱动板和控制板,搭建PMSM-PMSG并轴传动控制系统,如图10所示,进行实验验证。
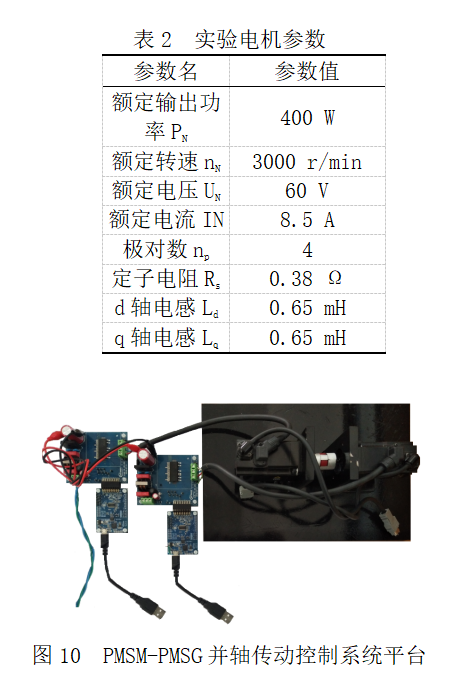
图10中,驱动板的型号为EVAL-M1-05-650,MOSFET IPM为IRSM505-065PA,500V,内置自举驱动电源,25℃下直流输出电流为2.6A。控制板型号为EVAL-M1-101T,控制器为32位ARM® Cortex®-M4 XMC4200 K256 BA,数字隔离器为单/双通道Si8621EC,电机控制芯片为iMOTION IMC101TF064XUMA1,其主要特征如下:电机控制引擎(MCE)、磁场定向控制(FOC)、电压空间矢量调制(SVPWM)单分流电阻检测电流、无速度传感器、支持霍尔传感器、支持功率因数校正(APFC)、具有用于电机控制指令的灵活主机接口,支持IEC60335(B类)、内置脚本引擎以及多种封装。
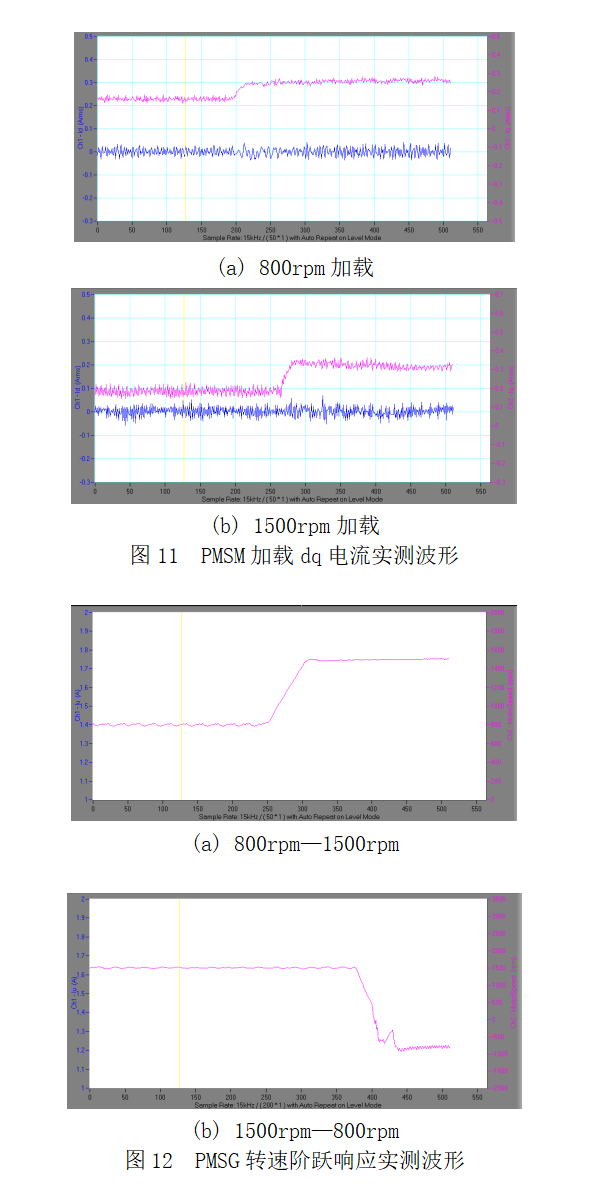
对PMSM-PMSG并轴传动系统进行实验测试,PMSM的负载为PMSG,实测结果表明基于iMOTION的PMSM-PMSG并轴传动系统设计的可行性和有效性。其中,在800rpm和1500rpm时,突加负载时dq电流实测波形如图11所示,在800rpm与1500rpm之间阶跃响应时转速实测波形如图12所示。
5 结论
对基于英飞凌iMOTION模块化应用程序设计工具包(MADK)的无速度传感器矢量控制的400W永磁同步电动机—发电机传动系统进行了理论分析、仿真分析和实验验证,结果表明iMOTION模块化应用程序适用于快速开发PMSM有或无速度传感器矢量控制系统,具有很强的灵活性和可扩展性,可用于本科生和硕士研究生教学演示和教学实验。
参考文献:
[1] 谷善茂, 何凤有, 谭国俊, 叶生文. 永磁同步电动机无传感器控制技术现状与发展[J]. 电工技术学报, 2009, 24(11):14-20.
[2] 刘颖, 周波, 冯瑛, 赵承亮. 基于脉振高频电流注入SPMSM低速无位置传感器控制[J]. 电工技术学报, 2012, 27(07): 139-145.
[3] 于艳君, 柴凤, 欧景, 高宏伟. 基于旋转高频信号法的IPMSM无位置传感器控制[J]. 电工技术学报, 2013, 28(07): 26-31.
[4] X. Luo, Q. Tang, A. Shen and Q. Zhang. PMSM sensorless control by injecting HF pulsating carrier signal into estimated fixed-frequency rotating reference frame[J]. IEEE Transactions on Industrial Electronics, 2016, 63(04): 2294-2303.
[5] A. H. Almarhoon, Z. Q. Zhu and P. Xu. Improved rotor position estimation accuracy by rotating carrier signal injection utilizing zero-sequence carrier voltage for dual three-phase PMSM[J]. IEEE Transactions on Industrial Electronics, 2017, 64(06): 4454-4462.
[6] 李一粟, 姚文熙, 吕征宇. 对拖测试平台的共模回路阻抗提升控制技术[J]. 电力电子技术, 2020, 54(07): 128-132.
[7] 韦峰. 永磁同步电机谐波抑制方法与对拖试验研究[D]. 广州:华南理工大学, 2019.
[8] 张永鑫, 杨喜军, 姜建国. 永磁同步电动机互馈对拖测试平台的研究[J]. 电机与控制应用,2010,37(02):47-52.
[9] 郑艳文, 苑国锋, 柴建云, 李永东. 大容量对拖式双馈电机试验系统[J]. 清华大学学报(自然科学版), 2010, 50(01): 27-30+34.
[10] D. K. Bhattacharyya and J. R. Goetz, "High reliability motor control for aerospace applications," 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2007, pp. 1-9.doi: 10.1109/EPE.2007. 4417765.
[11] J. Goetz, Weiping Hu and J. Milliken, "Sensorless digital motor controller for high reliability applications," Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, 2006. APEC '06., Dallas, TX, USA, 2006, pp. 6 pp.-.doi: 10.1109/ APEC. 2006.1620762.
[12] 陈伯时. 电力拖动自动控制系统-运动控制系统[M]. 北京:机械工业出版社, 2003年8月.
[13] 袁登科,徐延东,李秀涛. 永磁同步电动机变频调速系统及其控制[M]. 北京:机械工业出版社,2015年6月.
[14] 袁雷,胡冰新,魏克银,陈姝. 现代永磁同步电机控制原理及MATLAB仿真[M]. 北京:北京航空航天大学出版社,2016年4月.
--------------------------------------------------------------------------------------------------------------------------------------
作者简介:
李忠昶,1997年生,男,湖北省恩施人,上海交通大学电气工程系在读本科生,专业为电力电子与电力传动,研究方向为永磁同步电动机控制系统设计




共0条 [查看全部] 网友评论