


关键词:消防机器人;灭火;单片机;红外遥控
1 引言
根据公安部相关统计数据,近5年,全国在救火抢险一线牺牲的消防人员达144人,每年有300多名消防员受伤甚至致残[1]。这些触目惊心的数字在不断的提醒着我们,消防员的人身安全问题应该得到更高的重视。消防机器人的出现可以有效地减少消防员的伤亡[2-5]。消防机器人可以代替消防员进入到复杂的火灾现场,勘探现场的情况,大大的减少消防员的危险系数,也能够帮助消防员更加高效地完成灭火救援任务。本文旨在设计一款基于单片机的可以寻找火源和自动避开障碍物的消防机器人控制系统。当检测到火源,机器小车可以自动调整姿态,对准火源,灭火电机启动将蜡烛吹灭实现模拟灭火。另外还添加了红外遥控模块,可以通过红外遥控器来控制小车行驶。本文设计的机器人成本低,易于操作,有一定的实际应用价值。
2 整体方案设计
消防机器人采用STC89C52单片机作为主要控制单元,该型单片机价格便宜,功能强大,性价比高,能够满足此次设计的要求。消防机器人通过红外传感器、光敏晶体管等器件来采集各类信息,送入主控单元单片机,处理数据后完成相应动作,达到自身控制。其中寻找火源采用的是光敏晶体管感应到火源,然后通过比较器输出数字信号送至单片机进行处理。避障用到的是红外光电开关[6-8],光电开关发射红外线当前面有障碍时红外线反射给接收管,接收管收到信号后通过比较器处理成数字信号给单片机判断处理。红外遥控行驶通过红外遥控发射红外编码信号,由红外接收头接收送至单片机进行解码,然后可以根据所按的功能键实现行驶。液晶显示用到的是1602LCD来进行实时显示工作状态。该系统设计比较灵活,更重要的是采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足要求。
3 硬件实现及单元电路设计
本次的消防机器人主要用到了六个模块,包括主控制模块、驱动电路模块、电源模块、显示模块、火源检测模块和避障模块。在这些模块的相互作用之下能够实现消防机器人的基本功能。
3.1 主控制模块
此次的单片机主控电路设计是以STC89C52单片机为核心的单片机最小系统。外接有红外避障传模块、火焰检测模块、L298N电机驱动模块、1602液晶显示模块、电机驱动模块等,来完成消防小车的寻找火源并灭火的任务。单片机主控电路由下图1所示。
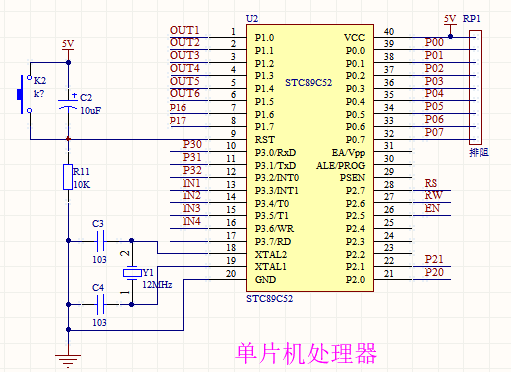
图1 主控制模块
3.2 驱动电路
电机驱动一般采用H桥式驱动电路,L298N内部集成了H桥式驱动电路,从而可以采用L298N电路来驱动电机。通过单片机给予L298N电路PWM信号来控制小车的速度,起停等。其引脚图如下图2所示,驱动电路原理图如图3所示。
图3 电机驱动电路![]()
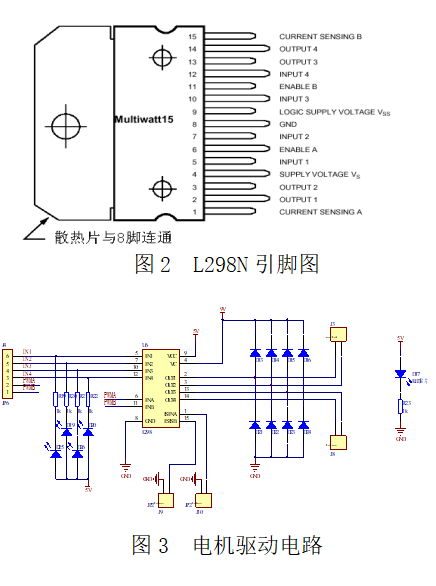
二极管构成稳压保护电路,发光二极管所对应的是电机的正反转指示灯,这样在调试时可以在不涉及调速情况下,清楚的看出电机的运转情况。
3.3 电源模块
本次消防机器人的设计采用的是12V蓄电池来为系统进行供电。因为蓄电池具有较强的电流驱动能力以及稳定的电压输出性能。12V的电压经过7805三端稳压芯片稳压后能够稳定的输出5V的电压,电路图如图4所示。
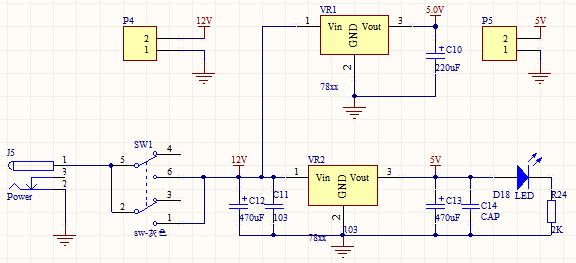
图4 电源模块
3.4 显示模块
本次设计的显示模块用到的是用LCD液晶进行显示。由于LCD显示效果比较清晰,显示的内容丰富,信息量大,使用起来也方便并且能够快速的显示。对于此系统我们选用1602液晶能够很好的满足显示要求。
3.5 火源检测模块
火焰传感器的质量对于消防机器人系统的功能能否实现是至关重要的。本次设计制作的火焰传感器及其调理电路如图5所示。
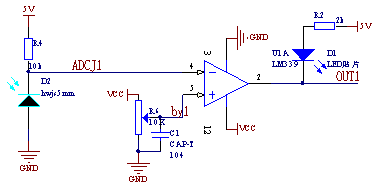
图5 火源检测模块
在该电路中,当火焰传感器没有检测到火焰时,火焰传感器不导通而使得火焰传感器的阳极上拉电阻R4上拉为高电平,经比较器滤波整形后输出高电平。当检测到火焰时,火焰传感器导通,比较器输出低电平。
3.6 避障模块
本系统对障碍物的检测采用E18-D50NK型号的红外传感器,E18-D50NK传感器是一种红外线反射式接近开关传感器,用于物体的反射式检测,该传感器具有体积小,功耗低,应用方便,稳定可靠等优点。输出信号为数字量,不需要进行A/D转换,可直接与单片机的I/O口相连,检测到目标时信号线输出是低电平,正常状态时为高电平,为能让单片机正常检测,在信号输出端需外接一个1KΩ的上拉电阻。检测距离可达50cm,距离可通过可调电位器调节。原理分析如图6所示。
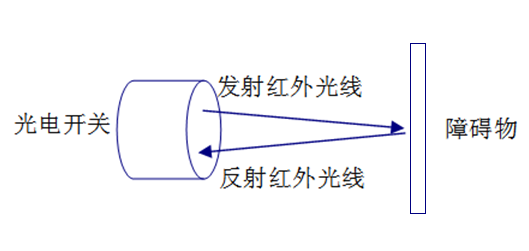
图6 避障原理
E18-D50NK红外光电开关发射出红外线,被物体阻断或部分反射,E18-D50NK内部红外接收管接收到反射回来的红外线,然后有一个由高到低的电压变化,E18-D50NK内部电压比较器根据这个电压的变化输出数电信号给单片机处理。当有光线反射回来时E18-D50NK信号脚输出低电平。
4 系统软件设计
本次统设计中采用美国Keil Software公司的 Keilμ Version集成开发环境,使用C语言进行程序设计。消防机器人的主流程图如图7所示。
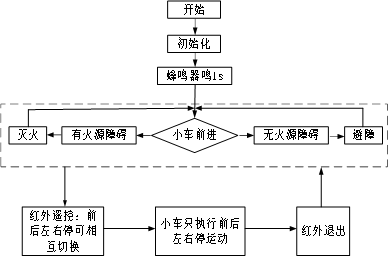
图7 消防机器人流程图
写入程序后消防小车可以进行自动寻找火源并且避开障碍物,找到火源后自行灭火。也可以通过红外遥控器对小车的运动进行控制。
消防机器人主程序如下:
void main()
{
init_1602();
init_1602_dis_csf();
init_int0();
time_init();
write_string(2,0," zidongche ");
while(1)
{
yaokong_che();
if(flag_100ms == 1)
{
flag_100ms = 0;
if(flag_shoudong_zidong == 0)
{
miehuo_jin();
if(q_miehuo_jin == 1)
hongwai_bizhang();
else
stop();
}
}
}
}
void int0() interrupt 0
{
unsigned char i,j;
EX0 = 0;
delay_100us(40); //防止干扰
if(P32 == 0)
{
while(P32 == 0);
delay_100us(24);
if(P32 == 1) //引码结束
{
delay_100us(20);
for(i=0;i<4;i++)
for(j=0;j<8;j++)
{
while(P32 == 0);
delay_100us(8);
if(P32 == 0)
{
table[i] >>= 1;
}
else
{
delay_100us(10);
table[i] >>= 1;
table[i] |= 0x80;
}
}
flag_hongwai_en = 1;
}
}
EX0 = 1;
}
5 测试结果及分析
在实际测试现场中放置了三个火源,利用红外遥控器控制小车进入到火场后切换到自动模式,小车能够主动避开障碍物,找到前方的火源。找到火源后,小车调整姿态,报警蜂鸣器响起,启动风扇将火源熄灭。开始寻找下一个火源,直到火源都被熄灭。在测试过程中,小车的工作状态可以实时的显示在液晶显示器上。这次设计的消防机器人实现了寻火、灭火、避障等功能。
6 结束语
随着工业技术的不断进步,不断的涌现出各种机器人。消防机器人的种类也越来越多,功能越来越齐全。本文中设计的消防机器人在组装测试后,整个系统方案切实可行,方便可靠,易于操作,希望能够在一定程度上帮助到消防员完成灭火任务。科技在不断地进步,期望在不久的将来可以研发出安全高效的消防机器人来代替消防员进行危险的灭火任务,降低消防员的危险系数使消防员不再是一个高危的职业。
参考文献:
[1]范茂奎,杨千红,冯时进,等.我国消防员灭火救援中伤亡情况研究[J].工业安全与环保,2015,(2):82-85.
[2]孙胜利.浅谈消防机器人及其运用[J].消防论坛 ,2018,(21):61-63.
[3]陈庆暖.消防灭火机器人及其应用[J].消防科学与技术 ,2018,37(5):644-646.
[4]栾洋.消防机器人灭火救援应用技术分析[J].科技展望,2017,(2).
[5]徐晓明.消防机器人实战化应用初探[J].公安部消防局,2016,(9).
[6]赵勇.基于Arduino和Android平台的智能小车避障系统设计研究[D].西安:长安大学,2014.
[7]叶利民.消防灭火机器人火场应用技术[J].消防科学与技术,2017,36(4):501-503.
[8]张咪咪.基于多传感器信息融合的智能小车避障[J].计算机系统应,2012,21 (11):94-97.
[9]盖涛.多功能抢险消防机器人开发[J].科技信息,2009,(5):425-426.
[10]袁峥.消防车智能监控系统研究与开发[D].郑州:郑州大学,2013.
[11]杨勇,邓成中.消防车用消防炮控制系统设计[J].消防科学与技术,2012,5(9):1-3.
[12]姜华.高空救援灭火机器人的设计[D].合肥:中国科学技术大学,2014.
[13]刘鹏彬,范延增,刘浩男,等.全地形消防机器人[J].机械设计,2015,32 (12):40.
[14]马洪雨,帕孜来,马合木提,等.基于单片机的电动摩托车无刷直流电机控制系统的设计[J].电子设计工程,2016,24 (4):168-167.
[15]谭光辉.消防机器人装备在灭火救援中的有效运用[J].科技创新与应用,2016,(29):300.




共0条 [查看全部] 网友评论