
关键词:工业机器人;IP等级;密封性
1 引言
随着工业机器人应用场景的不断深入,一些特殊的使用环境,如高湿环境、粉尘环境逐渐使用到工业机器人来代替人工进行作业,如:机床内部上下料作业、清洗工件后取放料等。这样特殊的应用场景就需要工业机器人本体需要达到一定的防护等级。机器人四大家族:发那科、安川、KUKA、ABB以及一些国外机器人厂商如NACHI、史陶比尔都有相应的机器人产品达到IP69K、IP67等级的防护性能。由于本体防护技术的先进性,在这样机器人细分应用领域的市场份额大部分被以上机器人厂商所占有,很少有国产机器人进入此细分市场。为了达到机器人使用场景的相应防护等级,不仅要在机器人本体结构设计上要有技术创新,更要有相应的检测系统来保证机器人在生产制造过程中的质量控制,来确保出货的每台机器人都要达到设计要求。灵猴机器人为了实现机器人本体防护性能达到GB/T 4208-2017外壳防护等级(IP代码)IP68等级的要求,不仅在机器人自身本体结构密封性设计上有较精细的设计,用时还开发出一套用于检测机器人装配后本体整体的密封性的检测系统。此检测系统检测效率高,无需定制测试夹具工装,非常适合于装配产线进行系统性检测机器人本体装配密封质量。
2 检测系统简述
检测系统主要包括气源、负压检测气路和正压检测气路。
正压检测气路:正压检测气路包括依次连接的气源、过滤减压阀、精密减压阀、电磁阀和机器人本体等。气源与正压检测气路连接,压缩空气通过气源经过过滤减压阀、连接精密减压阀,然后通过气管与机器人本体内部腔体相连接。过滤减压阀主要作用是过滤压缩空气中的水汽和杂质等;再通过调节精密减压阀来控制进入机器人本体内部腔体的空气压力。电磁阀来通过控制开关控制进入机器人本体内部气体的通断。
负压检测气路:负压检测气路包括依次连接的真空电磁阀、真空发生器和负压电磁阀,真空电磁阀设有负压检测气路输入接口,负压电磁阀设有负压检测气路输出接口,负压检测气路设有压力表。其中负压电磁阀通过控制开关控制负压检测气路通断。通过真空发生器来对机器人本体的内腔进行抽取真空操作,真空电磁阀来控制抽取本体腔体的负压值的大小。负压数显压力表来实时显现机器人本体内腔的负压值。
检测系统,通过以上正压检测气路和负压检测气路进行相结合的检测方法,来实现对检测的机器人产品密封性能的全面检测,通过此检测系统的方法进行检测的机器人产品,已经通过相应的专业机构认证通过,并获得证书。
3 检测系统实例分析
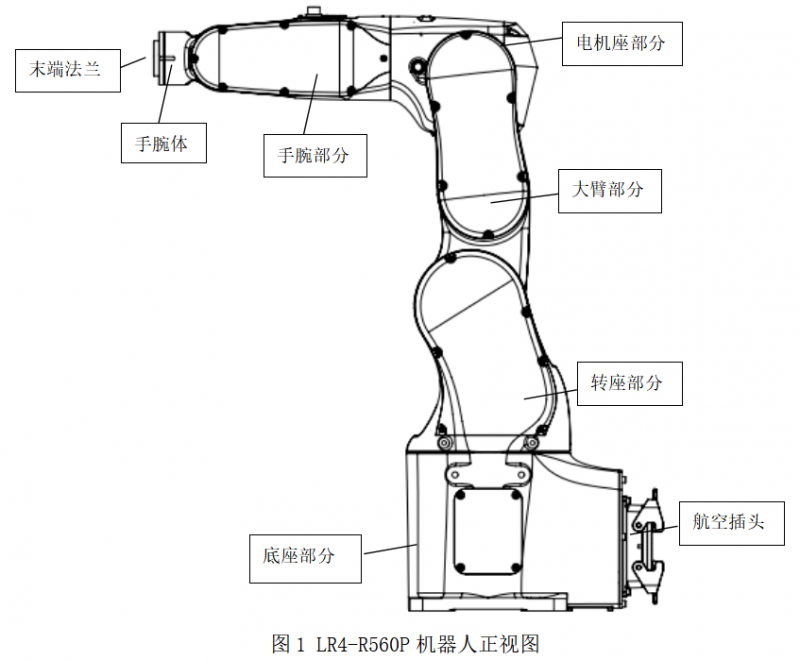
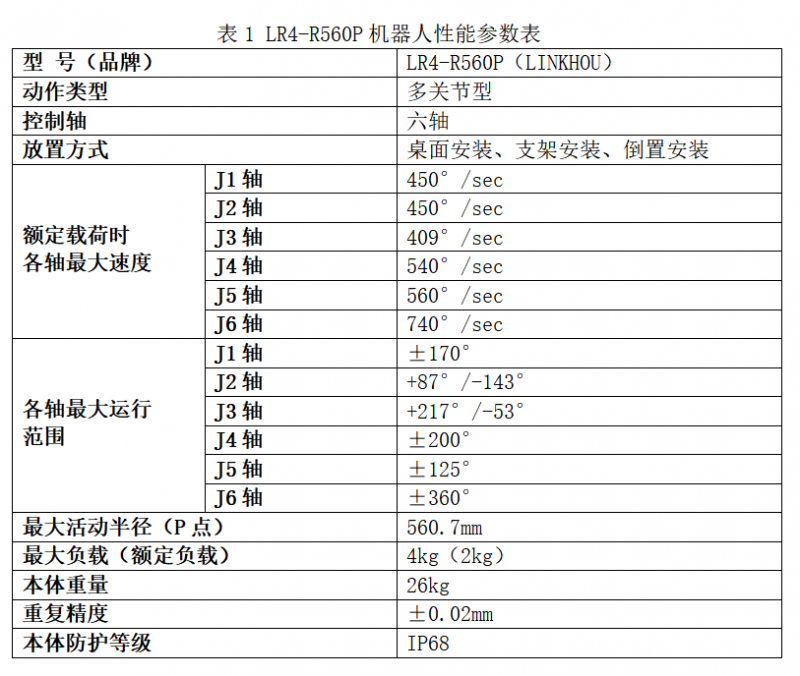
检测系统主要适用于检测具有满足国家标准GB/T 4208-2017外壳防护等级(IP代码)中相应的防护等级结构设计的机器人产品。下面实际检测的机器人(图1所示)为灵猴品牌的六轴机器人产品LR4-R560P,最大负载4kg,最大臂展560mm。机器人性能参数见表1,设计本体外壳防护等级为IP68等级。
根据国家标准GB/T 4208-2017外壳防护等级(IP代码)中相应的防护等级要求,IP68等级要求为:(1)无灰尘进入(在测试箱内,加负压,持续运行24H,无粉尘进入机器人壳体内部);(2)防持续潜水影响(在1m深水下,持续运行24H,无液体进入机器人壳体内部)。
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
待机器人本体装配完成后,使用本文表述的检测系统,进行检测机器人本体的密封性,是否达到外壳防护达到IP68设计要求。在测试之前,需要计算出满足达到IP68等级防护要求,测试气路需要进行正压和负压测试的具体的压力值,若测试的压力值没有达到设计的机器人本体能够承受的压力值,则测试出来的产品,不一定能满足设计要求。以下的实例给出的压力值,仅仅是针对LR4-R560P机型的压力值。
4 系统检测作业
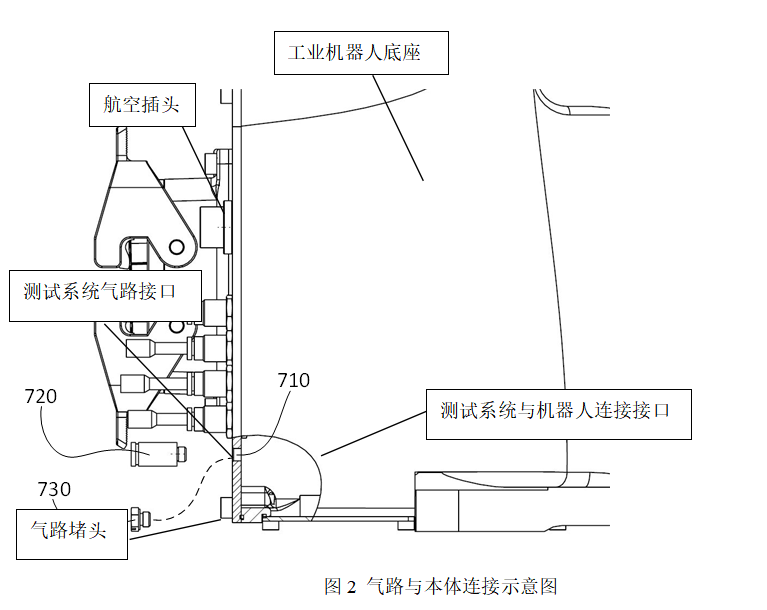
在进行测试操作前,需要在机器人后面板处增加用于工业机器人气密检测接口7包括螺口结构7-10、气管接头7-20及堵头7-30,在测试时,通过气管接头7-20实现检测气路于机器人本体进行连接,与正压检测气路、负压检测气路螺接密封;在检测完成后,工业机器人气密检测接口7通过堵头7-30进行密封,在机器人使用过程中,也要始终使用堵头7-30实现该螺接结构的密封(如图2所示)。
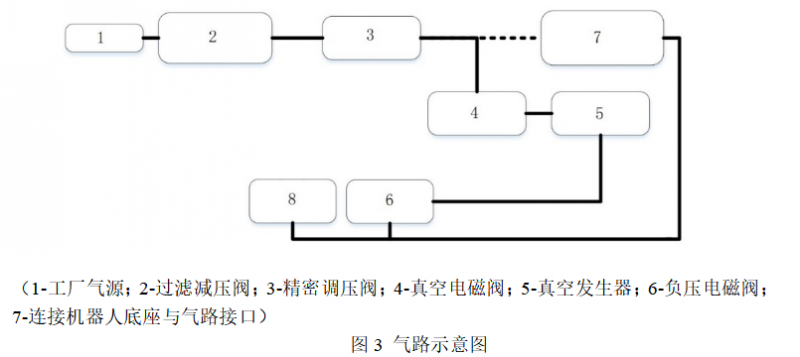
正压测试:气路(参见图3)包括工厂气源1通过气管连接有过滤减压阀2,正压检测气路设有精密调压阀3,过滤减压阀2与精密调压阀3连接;通过过滤减压阀2初步调节进入精密减压阀2的初始压力值,然后精密调压阀3进行精密调压到一个稳定的数值,然后使用气管与气管接头7-20相连接,将气体通入机器人本体内部。等一段时间后,气体完全进入机器人腔体后,关闭过滤减压阀2,观察与精密调压阀3相连接的数显压力表的显示值变化。 若等一段时间后,数显压力表的密闭腔体的数值很快下降,则说明机器人装配过程中出现了密封问题,需要进行寻找装配时密封的问题点;若等一段时间后,数显压力表的数值没有明显的变化,则说明本体在装配后,密封效果良好,可以进入负压测试阶段。
负压测试:气路(参见图3)包括依次连接工厂气源1通过气管连接有过滤减压阀2,正压检测气路设有精密调压阀3、真空电磁阀4、真空发生器5和负压电磁阀6,真空电磁阀4设有负压检测气路输入接口,负压电磁阀6设有负压检测气路输出接口;精密调压阀3与真空电磁阀4、工业机器人气密检测接口7-20连接;精密调压阀3与真空电磁阀4连接时,负压电磁阀6连接于工业机器人气密检测接口7-20,通过控制开关控制负压电磁阀6实现负压检测气路的通断,进行负压检测,负压检测气路设有数显压力表8对负压检测压力进行监控。精密调压阀3与负压检测气路的真空电磁阀4接通,工厂气源1依次通过过滤减压阀2、精密调压阀3、真空电磁阀4和真空发生器5,形成规定压力的真空环境;负压电磁阀6通过闭合控制开关接通负压检测气路,输出负向气压,对工业机器人内部空腔进行抽气,至数显压力表显示的压力达到设定的测试压力范围。断开负压电磁阀6的控制开关,若数显压力表8显示的压力在短时间内快速超出测试压力范围,则说明机器人装配过程中出现了密封问题,需要进行寻找装配时密封的问题点;若数显压力表8显示的压力稳定在测试压力范围内,则需要在之后的一段时间内根据数显压力表显示的压力变化的速率判断工业机器人是否达到设计的气密能力;若数显压力表8显示的压力超出测试压力范围则需要进行正压修复检验。
负压测试时,在开始之前,要计算出机器人本体能够承受的负压值。然后在抽取真空时设定的负压检查初始压力值范围为(-50KPa,-45KPa),当断开负压电磁阀6的控制开关,若数显压力表8的显示的数值在此范围之间,则可以进行负压检验;假设此时数显压力表8显示的数值稳定在-48KPa,则需要在之后的一段时间内获取数显压力表8显示的压力变化的速率;例如规定满足气密设计的检验标准为3min内压力变化速率需要小于0.5KPa/min,但是3mins后,压力表的数值由-48KPa变为-45KPa,实际气压变化速度为1KPa/min,大于规定的检验标准,则说明器人装配过程中出现了密封问题,需要进行寻找装配时密封的问题点。
机器人本体密封性测试,需要同时满足正压和负压测试,以保证机器人整体的密封性能。在机器人测试过程中,出现的气压变化较大的情况,不允许流入下一工站进行作业。通过此方法测试合格后的产品,将送给第三方检测系统进行第三方检测并输出相应的测试报告,测试通过报告见(图4所示)。通过报告,我们可以看到通过此测试系统测试合格后的产品通过第三方测试认证,并获得认证证书,满足IP68外壳防护等级。

5 小结
通过该密封性测试的系统应用,在生产中可以使用该系统可以替代一些防护性测试设备,不仅仅可以使用在机器人产品的密封性测试上,也可以推广到别的工业产品上,用于提高产品的批量生产效率。同时,该系统测试后的产品,不仅仅是满足了IP68等级的测试,目前该机器人产品还持续在潜水运行,持续运行时间,远远大于测试报告所表述的24H水下持续潜水(图5所示)。通过此严格的密封测试,使得机器人完成能够胜任在高湿,高粉尘环境中作业。
参考文献:
[1]成大先. 机械设计手册第五版[M]. 北京:化学工业出版社,2004.1.
[2]SMC产品样册CAT.C-15-51A[Z]. SMC,2015.
[3]苏州灵猴机器人有限公司. LR4-R560型工业机器人机械使用维护手册V1.1[Z]. 2018.
[4]苏州:中认英泰检测技术有限公司. 检测报告20190110K687[Z]. 2019.
[5]GB/T4208-2017外壳防护等级(IP代码)[S]. 北京:中国标准出版社,2017.
第一作者简介:
姓名: 王祥祥
出生年份:1990年
性别: 男
学位/职位:本科/机器人机构设计工程师
就职单位:苏州灵猴机器人有限公司
研究方向:工业机器人本体结构设计




共0条 [查看全部] 网友评论