



关键词:救援机器人;单片机;远程控制;实时视频采集
1 引言
远程排爆救援机器人能通过远距离控制进入危险现场排除危险品,找到可疑的危险物品,并带离危险区。远程排爆救援可以有效地提高救援的效率并且减少施救人员的伤亡,它们不但能够帮助工作人员执行救援工作,而且能够代替工作人员执行搜救任务,因此将可进行远程的排爆救援机器人用于危险而复杂的环境中搜索排爆和营救幸存者是非常实用的。
本文设计了一种基于单片机的远程排爆救援机器人系统,以STM32单片机为主控制器,机器人的主体由四自由度机械手臂和全铝合金底板履带车构成,辅以WIFI智能传输模块,实现了手机APP远程控制机器人前后左右运动进行抓取搬运工作。
2 总体方案设计
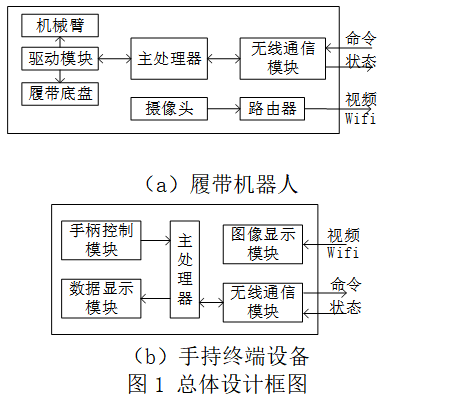
系统包括履带机器人和手持控制终端两大部分,总体设计框图如图1所示。履带机器人由视频采集传输模块、机械模块、无线通信模块以及控制模块构成。首先控制模块通过无线通信模块获取手持设备发送的控制命令,当控制命令是动作命令时,根据接收的参数控制机器人运动或机械臂抓取物品。考虑到带宽原因和控制方面的需求,图像传输模块与行动控制使用不同的无线信道。视频采集传输模块采集到图像后直接交给无线路由器,传送给手持设备,这个过程不受主控制器控制。
3 系统硬件设计与实现
远程排爆救援机器人系统的硬件设计可以分为部分:控制机构、行进装置、机械手、供电部分以及WIFI传输部分。
3.1 控制机构
主控制器选取STM32单片机,具有高性能、低成本、低功耗等优势。STM32控制芯片电路图如图2所示。不同于其他系列的单片机,STM32系列的存储器容量更大,这样能够解决后期因需要外部连接硬件模块过多、各模块间通信复杂而导致的代码较长致使编译出错的问题。除此之外,STM系列单片机的优化功能较好,性能和引脚数量都能够满足用户需求。
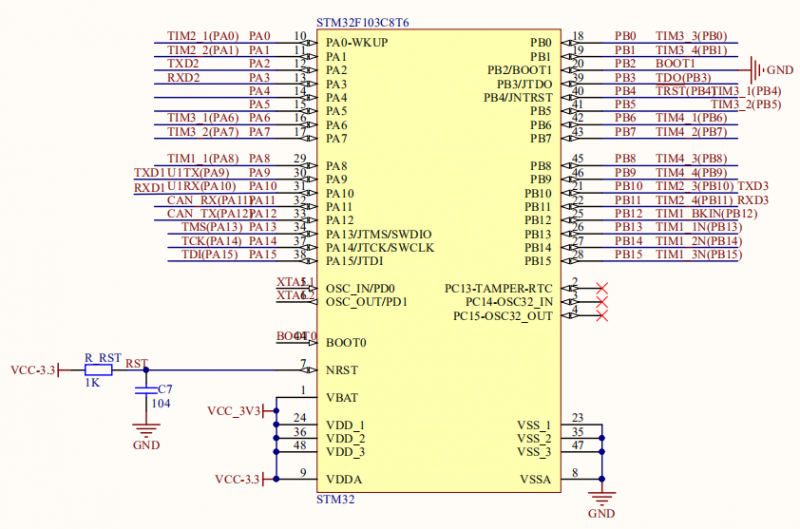
图2 STM32芯片电路图
3.2 行进装置
选用了履带车作为行进装置,采用全铝合金底板,具有越障能力好、地形适应能力强等优点。车体搭载两个驱动轮和四个从动轮,采用转速为330/min的直流减速电机,噪音小、寿命长两侧电机配合转动可进行前后左右及原地转弯运动。电机驱动电路图如图3所示。
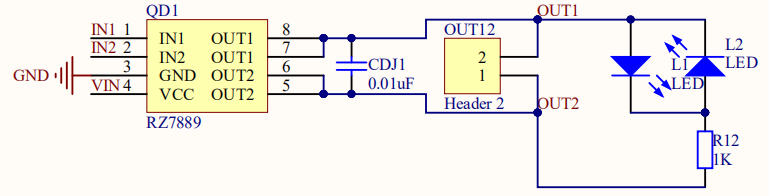
图3 电机驱动模块电路图
3.3 机械手
机器人需要灵活转动进行抓取动作,故设计由四个舵机和一个手爪构成多关节多自由度的机械手,驱动舵机进行伸展抓取操作。
舵机是通过单片机产生脉冲信号(PWM波)来控制的,通过软件编程可以改变PWM波的占空比,从而控制舵机根据需要旋转到不同的角度,控制模块电路如图4所示。
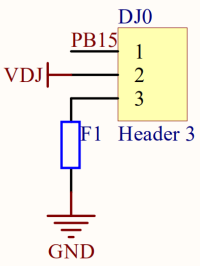
图4 单个舵机控制模块电路
组装好的机械手示意图如图5所示。机械手臂上装载三个TBS2701舵机,而机械爪上搭载的是TBSN-K15防烧电机,在使用时可有效避免堵转使用寿命大大提升。
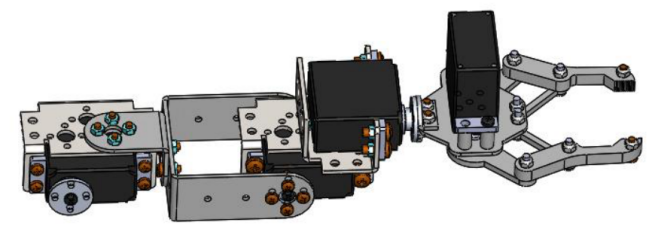
图5 舵机控制模块电路
3.4 供电部分
为简化供电部分,机器人采用单一电源供电方式直接由7.4V锂电池进行供电。STM32主控板载有大功率稳压模块,无需外接稳压模块,输入电池7.4V,控制板通过可调稳压电路一方面通过电位器旋钮调节输出电压到6V左右给舵机供电,另一方面通过 AMS117-5.0和一片3.3V稳压芯片给主控芯片以及其它模块供电。
3.5 WIFI传输部分
在机器人的车身与机械手搭建成功后,在履带车的车身前装上智能WIFI摄像头,该摄像头嵌入720PWIFI视频模块,功能强大,具有高效的音频及视频处理能力,信号强且操作简单。采用开源版手机APP进行WIFI直连即可进行视频传输,辅以代码进行对STM32的控制,实现远距离视频传输及手持终端远程控制机器人。WIFI模块实物图如图6所示。

图6 WIFI模块实物图
4 系统软件设计
软件代码完成系统各部分的控制及通信,在Keil集成环境下采用C语言编写,并通过编译链接生成目标代码,通过下载器下载到STM32上运行。开启电源后,机器人开机复位进入等待状态,等待手持终端传送来控制信号。远程排爆救援机器人控制系统软件功能设计流程图如图7所示。

图7 系统程序流程图
程序设计可分为多个模块分别编写,主要有:系统初始化模块、电机驱动模块、舵机控制模块以及信号收发模块。其中舵机控制模块较为复杂,因为要同时控制多路舵机且舵机响应速度很快。为了有效控制舵机速度,在程序编写时增加了如下一段程序:
while (1)
{
if(flag_vpwm==1)
{
vpwm();
flag_vpwm=0;
}
}
每进一次定时器中断flag_vpwm 被置位为1,每隔20ms调用一次vpwm() ,实现了舵机速度控制。
5 系统测试
将WIFI模块接到控制板之后,打开电源,这是可以看到摄像头处有蓝灯闪亮,等待蓝灯常亮时即可连接。在手机WIFI设置里面找到对应WIFI信号网络(以LTH开头的热点),点击并连接,这一部分是不需要密码。在连接上机器人的WIFI后,打开手机上的远程小车APP。如果搜索到则会出现a16b37,点击输入密码进行连接,即可进入控制界面如图8所示。
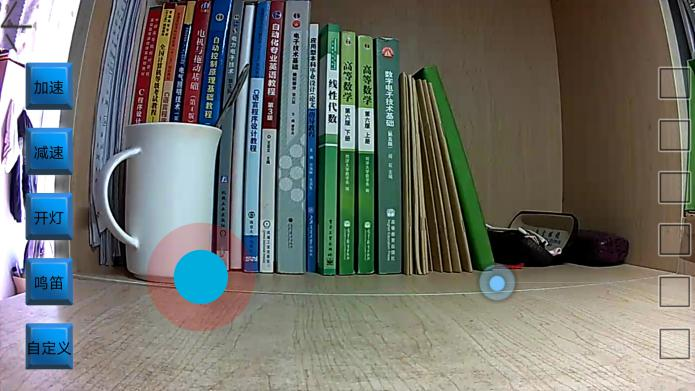
图8 手机APP控制界面图
控制界面左边从上到下分别为加速减速开灯鸣笛以及一个自定义按钮,在按钮右边大圆盘控制履带车行进,继续向右有一个小圆盘控制舵机的运行,最右边的六个空白框从上至下的四个分别对应机械手四路舵机另预留两个空按键位。
6 结束语
本文设计并实现了一远程排爆救援机器人系统,该机器人可用手机APP进行远程控制并进行实时视频传送。具有成本低、体积小、功耗低、扩展性好等特点。若进行下一阶段的研究可以搭载传感器对周围环境参数进行监测和反馈,增加循迹系统实现自动寻路行进。本设计有着广阔的发展前景,具有重要的实际运用意义。
参考文献:
[1]袁铭. 红外遥控智能小车设计[J]. 电子世界,2018(03):124-125.
[2]李彬彬,王建花,罗津,陈国星,周成. 基于Arduino平台的WIFI智能遥控小车设计[J]. 电子世界,2016(22):92-93.
[3]曾维鹏,张逢春. 基于蓝牙手机的遥控小车的设计与制作[J]. 电子制作,2016(19):8+34.
[4]宋亦薪,陈超,徐斌,谭军,代杭佚,包宋建. 基于单片机的无线遥控小车研究与实现[J]. 重庆文理学院学报(社会科学版),2016,35(05):69-74+97.
[5]赵学浩,钱卫国. 基于单片机的无线智能小车设计[J]. 常熟理工学院学报,2016,30(04):93-96.
[6]邓喜兵,许建明,陈炯明. 基于单片机的智能小车设计[J]. 电子世界,2016(09):47.
[7]聂茹. 基于蓝牙遥控的多功能智能小车设计[J].自动化与仪器仪表,2016(04):81-82+85.
[8]刘晓娟. 关于红外遥控消防小车的设计[J]. 工业设计,2016(03):86-87.






共0条 [查看全部] 网友评论