


关键词:电容传感器;手势识别;STM32
1 引言
手势是一种人类的基本特征,是人际交往过程中不可缺少的一部分。手势识别技术的发展,为人与机器交互提供了可能。根据手势在时间和空间上的差异,手势可分为静态手势和动态手势,对静态手势的研究主要考虑手势的位置信息,而研究动态手势除了要考虑手势空间位置变化,还需要考虑手势在时序中的变化规律。同时,手势识别技术无论是在手势样本的采集,还是手势的设计上都有自己的优势,对手势识别进行深入研究有着很重要的意义。
手势识别作为一个传统的、复杂的研究领域,国内外许多专家、学者进行了大量、深入的研究和分析。有采用了基于红外传感器的动态手势识别,其实现原理是利用4个定向二极管来感知反射的红外线能量,并将该数据转换为4个方向的距离信息[1]。微软Kinect是一款消费级的姿态传感器,利用Kinect体感设备的景深图像采集技术来获取人体动作的图像,通过阈值分割技术将手和人的身体分隔开,得到手部的图像信息,然后采用卡尔曼滤波技术对动态手势动作进行处理[2-3]。SVM是一种基于支持向量机的判别方法,通过此方法做静态手势处理,利用LeapMotion(体感控制器)获取视野内手势原始数据进行特征提取,降低手语分割难度,在此基础上将提取的特征整理成文本导入MATLAB,再经过数据归一化、PCA(主成分分析技术)降维,提升识别精度和运行速度[4]。还可以通过计算机的视觉感知功能,将图像转化为数字信号,借助识别模式等理论技术,将视觉感知的功能转化为手势的语言[5-7]。
综上所述,现有技术也可以达到一定的准确度和稳定性。但与之相比,通过电容传感器将更为简单低廉,数据更易处理。本文通过猜拳和数字测试也能保证稳定性,且通过学习模式,可以识别各种对象的手势。
2 实现原理
2.1 系统结构工作原理
FDC2214能够较准确的测量出电容值的大小,与其连接的平行板电容器由铝板和测试者的手构成。测试者的手势如图1所示。
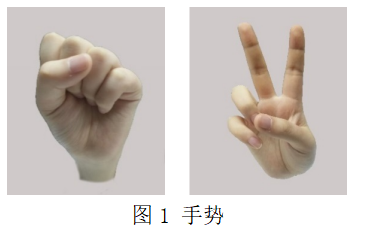
图1 手势
平行板电容决定式:
 (1) 由式(1)可知,当固定距离d,测试者比划出不同的手势,两极板间的相对面积不同,电容值会不一样。再利用微处理器通过IIC总线来给FDC2214的寄存器写命令,配置其寄存器。在该芯片的外围电路的电容传感器输入引脚处连接极板电容,微处理器通过IIC的数据线读取电容的测量结果。利用电容值的大小来反映摆出的手势。
(1) 由式(1)可知,当固定距离d,测试者比划出不同的手势,两极板间的相对面积不同,电容值会不一样。再利用微处理器通过IIC总线来给FDC2214的寄存器写命令,配置其寄存器。在该芯片的外围电路的电容传感器输入引脚处连接极板电容,微处理器通过IIC的数据线读取电容的测量结果。利用电容值的大小来反映摆出的手势。
判定功能是通过设立电容的阀值作为判断的依据,在对应手势的电容允许范围内,即为对应的手势。为使之更加准确,使用两个通道,建立两个范围进行测定。因为电容的变化不是瞬时变化而是有一个过程,重点是要判断何时是未定的状态,通过与前一次状态对比变化小于一定的阈值即为稳定。因为不同人的手的大小不同,所以要根据每次从传感器得到的值来维护阈值,使之应用更加广泛。显示功能是通过上位机来实现的,通过在上位机上显示工作状态,判定结果[8]。
2.2 FDC2214电容数据推导
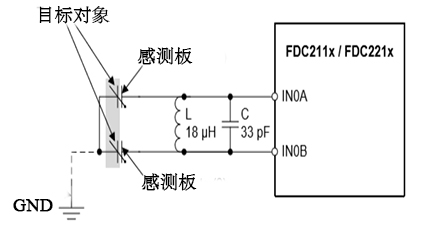
图2 FDC2214连接图
如图2所示,差动传感器配置的传感器电容为:
 (2)
(2)
 (3)
(3)
其中![]() ,
,![]() 和
和![]() 都由FDC2214寄存器给出。
都由FDC2214寄存器给出。
3 硬件实现
使用STM32F103RCT6微处理器作为主控芯片。它拥有丰富的资源,外设借口多,能较容易的测量和处理数据,灵活实现功能需求[9-10]。
使用铝板作为平行板电容器的极板,抗干扰能力强,稳定性较好。市场供应充足,价格便宜,容易购买。
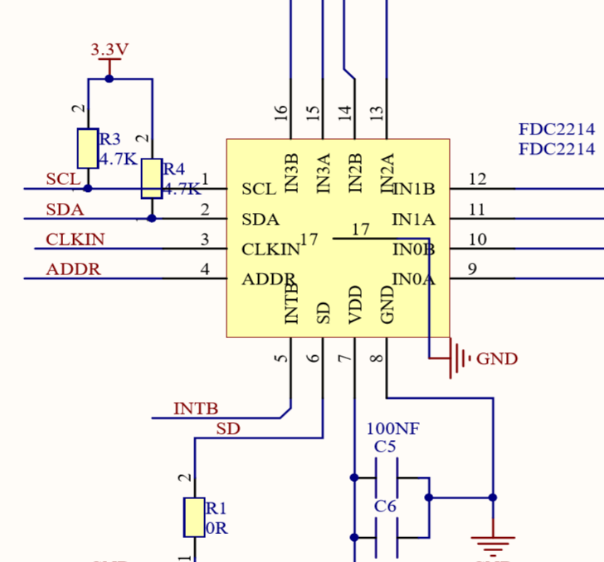
图3 FDC2214芯片引脚图
FDC2214电容式传感器是一种低功耗、低成本且高分辨率的非接触式感测器,适用于从接近检测和手势识别到远程液位感测领域的各项应用[11]。从如图3可知,FDC2214有四组输入接口引脚,有IIC通信的时钟线和数据线的引脚。使用时,只需可把它们与CPU引脚直接相连,简单灵活,且通信方便。
4 系统软件实现
手与铝板构成的电容通过电容传感器FDC2214,利用IIC通信,传给主CPU。按键控制CPU模式,CPU结合模式和电容值给出相应的结果,以上位机显示,如图4所示。
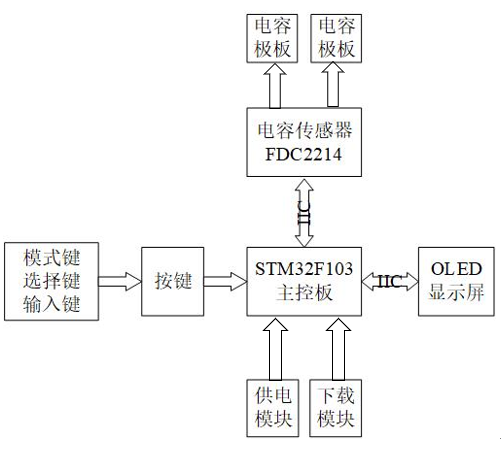
图4 主要模块设计图
从图5可知,系统初始化后进入模式选择,选择后对于判决模式,用传感器测出的值和阈值比较得出结果。对于学习模式,通过传感器测的值对阈值进行调整。
5 数据分析
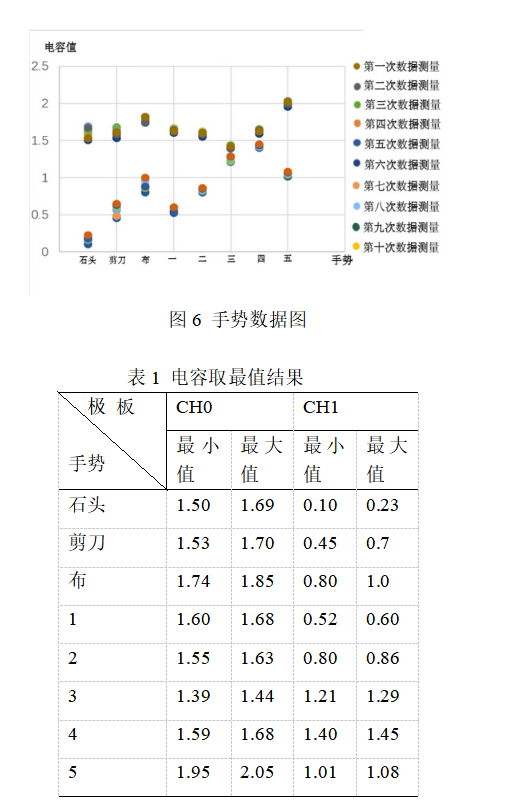
分别对石头、剪刀、布、1、2、3、4、5进行十次数据采集。可见每种手势数据集中且可以区分,如图6所示。
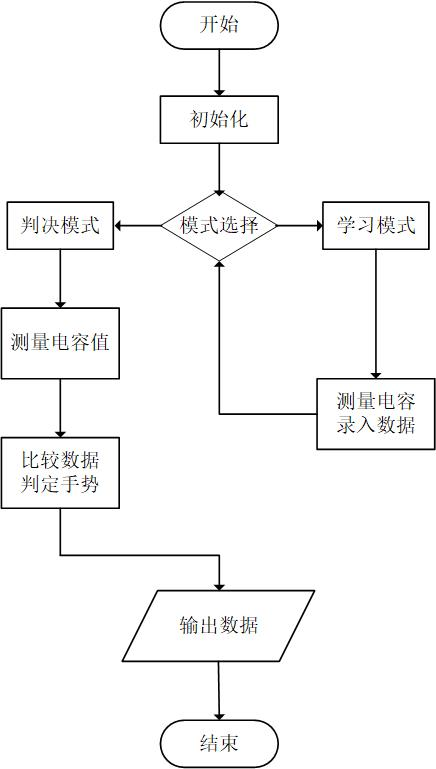
图5 系统总体工作流程图
对以上数据取最大值最小值,建立表1,以此定义阈值,锁存数据。为增加准确度,可以适当放宽最大最小值的范围。也可以再建立一个尺度进行限制,比如两个电容的和差的范围。
手势识别装置如图7所示,模拟测试环境,通过搭建指定的测试区,测试者按指定要求把手放在测试板上,并且使其手势与两平行铝板的高度不小于1厘米。系统可以在1秒中给出测试结果,正确率可以达到98%以上。
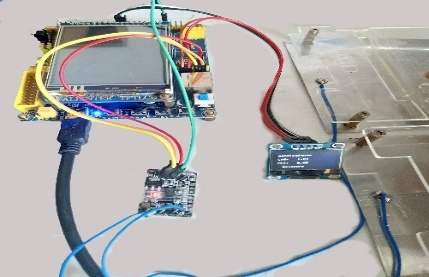
图7 手势识别装置
6 结论
以嵌入式微处理器STM32与电容式感应芯片FDC2214共同构建的手势识别系统,软硬件架构合理,数据采集处理简单有效,降低了系统的功能和功耗,实现了系统的微型化与智能化,解决了手势识别的分割难,精度低,距离受限,成本较高等问题。然而技术尚不够成熟,也还需要不断完善,优化算法,才能推广使用。
参考文献:
[1]施向军,王星尧. 基于红外传感器和隐马尔可夫模型的动态手势识别[J]. 电子器件,2018,41(05):1286-1290.
[2] 田元,王学璠,王志锋,陈加,姚璜. 基于Kinect的实时手势识别方法[J]. 计算机工程与设计,2018,39(06):1721-1726.
[3]杨琼楠,张苗苗,杨聪锟,陈超波. 基于Kinect手势识别的智能小车控制系统设计[J]. 国外电子测量技术,2018,37(09):85-89.
[4]王巍,张慧静,任相臻. 基于SVM的单手语识别方法[J]. 计算机工程与设计,2018,39(10):3234-3239.
[5]杨益平,闵啸. 基于计算机视觉的手势识别人机交互技术[J]. 电子技术与软件工程,2018(12) :138-139.
[6]石新源. 基于计算机视觉的动态手语识别研究[D]. 西安建筑科技大学,2018.
[7] 王泽宇. 计算机手势识别技术实现方法研究[J]. 四川水泥, 2016(11):270-270.
[8] 宋耀华,王梅霞. 基于嵌入式的智能手势识别器的设计[J]. 科技资讯,2017,15(30):2-3.
[9]杨文斌,杨会成,鲁春,朱文博. 基于肤色特征和卷积神经网络的手势识别方法[J]. 重工商大学学报(自然科学版),2018,35(04):75-81.
[10]文智. 嵌入式系统开发原理与实践[M]. 清华大学出版社, 2005.
[11]SMT32参考手册. ST意法半导体公司出版[Z]. 2013.08.
[12]FDC2214参考手册. TI德州仪器公司出版[Z]. 2016.02.
[13]刘正全,邓亮. 基于TOF手势识别的人车交互技术研究[J]. 汽车零部件,2018(09):62-64.
国家自然科学基金项目(51809128),江苏省省重点研发计划产业前瞻与共性关键技术重点项目(BE2018007);江苏省研究生科研与实践创新计划项目资助。




共0条 [查看全部] 网友评论