



关键词:小波;边缘检测;航空发动机;喷口喉道界面直径;测量
1 引言
针对当前我国航空发动机喉道截面直径标定过程中存在的问题,采用机器视觉测量方法,在极大提高工作效率同时可以有效减少测量工具损坏等造成的不必要的损失[1]。但是由于[1]中采用的图像处理方法为对预处理后的图像进行二值化,然后对二值化后的图像进行边缘检测,该方法虽然能够达到对喷口喉道截面边缘的检测,但是存在对实际环境适应性不强的问题。为进一步增强航空发动机喷口喉道截面直径机器视觉测量方法的环境适应,且考虑到小波较强的环境噪声消除能力[2],本文针对上述问题提出了一种基于小波变化的边缘检测的改进图像处理方法。
2 基于小波变换的边缘检测简介
2.1 小波变换的定义
小波变换的多尺度多分辨率特性与紧支性提供了描述信号局部化信息的能力。信号突变点可由小波变换的过零点或极值点以及在不同尺度下的变化来达到,从而可以表征出信号的局部化奇异性[3][4]。通常小波变换的定义是,如果函数ψ(t)∈L1∩L2满足:
Cψ= (1)
(1)
令ψa,b(t)表示函数ψ(t)经伸缩和平移得到的小波函数族,其中a,b为伸缩和平移因子。
ψa,b(t)= a,b∈R, a≠0 (2)
a,b∈R, a≠0 (2)
小波变换方法提供了一中窗口形状为两个矩形的的可调时频窗,该可调时频率可表示为如下形式:
[b-aΔψ,b+ aΔψ]X[(±ω0 -Δψ)/a, (±ω0+Δψ)/a] (3)
其中(b,±ω0 /a)表示窗口中心,aΔψ和Δψ/a分别表示时域窗口与频域窗口宽度。通过以上时域与频域两个窗口小波变换就可以动态调整不同频率对应的时域上的取样步长,调节对应的分辨率,达到对目标信号的对分辨率分析[5][6]。
2.2 小波变换的边缘检测流程
边缘信号一般表现为不连续性,对应图像中的高频信息。由于人的视觉系统主要对水平方向和垂直方向的高频信息敏感。因此通过二维小波变换把原始图像分解为不同尺度下的概貌信息,在概貌信息中,横向与纵向上的极大值分别对应于横向与纵向上的突变点,即边缘位置[7]。因此一般的小波变换边缘检测流程如图1所示。
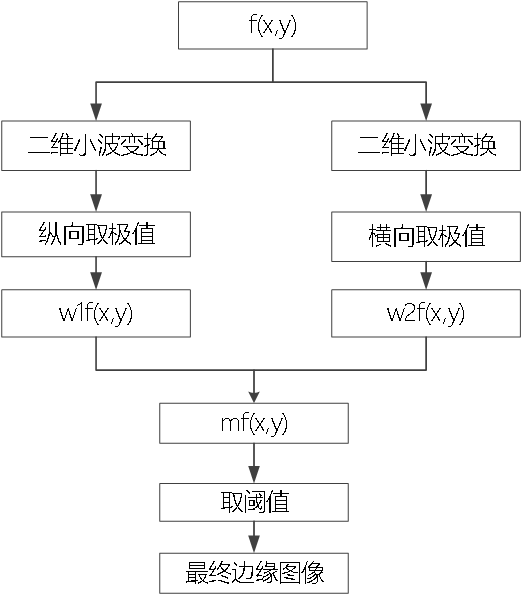
图1 小波变换进行边缘检测的一般流程图
3 基于小波变换边缘检测实现
鉴于LabVIEW作为图形化编程工具具有简便易用、支持硬件众多的特点,本文使用LabVIEW为平台实现相关测量程序。
3.1 小波基函数的选择
在小波变换中,小波基的选择是一项非常重要准备工作。小波基选择的好坏,直接决定了最终边缘检测结果的优劣。但是目前并无一般普适性准则,因此本文主要通过对常用小波基的处理结果对比,来选定小波基。常用的小波基函数有:haar函数、Daubechies函数、Biorthogonal函数、Coiflet函数、Symlets函数等。对图2所示预处理后的发动机喷口图像,分别采用Bior3_1小波基、haar小波基、db4小波基、coif4小波基、sym4小波基处理后,结果分别如图3-图7所示。通过对比相关结果,这里选择Bior3_1小波基函数。

3.2 喷口喉道截面直径的测量
3.2.1 喷口喉道截面直径的边缘拟合
由于采用小波变换提取边缘,喷口喉道界面内部部分部件边缘也会被附带提取出来,虽然可以通过调节阈值来过滤掉部分多余细节,但与此同时部分需要提取的信息也会一起滤除。这里考虑到实际标定过程中,一般喷口面积会全程相对于喷口喉道截面面积偏大,因此这里采用圆形检测的方法提取喉道界面边界,只需要检测圆外圆直径处于喷口直径与喷口喉道截面直径之间即可检测并拟合出对应的边缘。如图8所示,图中绿线为检测圆外圆与内圆,红线为检测拟合出的喷口喉道截面边缘。
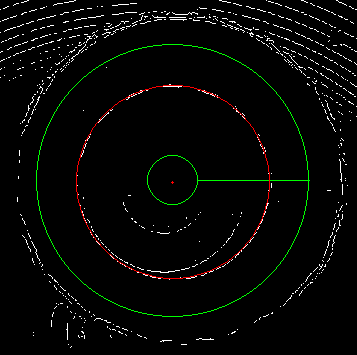
图8 喷口喉道截面边缘测量
3.2.2 圆形拟合半径测量
对于提取得到的图像,拟合出圆形边缘,测量得到半径和圆心像素值分别为,体测量半径为130.03像素,圆心坐标(358.18, 266.26)。将以上坐标和半径对目标图像叠加显示后如图9所示,可见测量拟合的圆刚好外切与目标图像,对以上测量像素值130.03与标定转换关系K相乘后得到该位置实际直径为631.16mm。
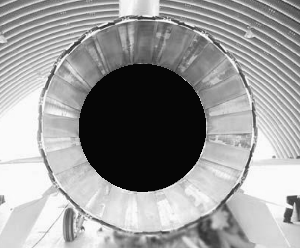
图9 拟合圆形在目标上的叠加显示
4 总结
运用本测量方法对航空发动机喷口喉道截面直径进行多次测量试验,在不同环境下测量结果具有较好的一致性。且通过对工人测量测量结果分析本方法测量结果处于其平均值水平。因此本系统能广泛应用于实际测量中,能够有效提高航空发动机喷口喉道截面直径机器视觉测量方法的环境适应能力。
参考文献:
[1]张义等. 基于机器视觉的航空发动机喷口喉道截面直径自动标定技术研究[J].智能机器人,2017,03(06) 54-57.
[2]何世文. 基于小波变换多尺度边缘检测分析[M]. 成都理工大学,2009.
[3]Mallat Stephane,Zhong Sifen. Characterization of Signals from Multiscale Edges[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence,1992,14(7):710-733.
[4]Mallat Stephane. Zero-Crossing of a Wavelet Transform[J]. IEEE Trans. on Information Theory, 1991,37(4):1019-1033
[5]李弼程,罗建书. 小波分析及其应用[M]. 北京:电子工业出版社,2003.
[6]周洪成,董慧颖. 一种改进的基于小波变换图像边缘检测[J]. 沈阳理工大学学报,2005,4(24):23-25.
[7]王俊卿,等. 基于小波变换的图像边缘检测[J]. 系统工程与电子技术,2004, 7(26):887-888.
作者简介:
史妍(1989.09-) 女 辽宁沈阳 硕士研究生 工程师 研究方向:发动机控制
单位:中国航发沈阳发动机研究所
张义,陈鹏飞,何健,周权,中国航发控制系统研究所






共0条 [查看全部] 网友评论