



关键词:自动化生产线;PLC;现场视教编程;工业机器人;效益
1 引言
过去的搬运等体力型工作主要依靠人力劳动,这种方式主要体现在劳动密集型社会。而随着我国工业能力的不断类提高。关于很多能够将人从重型劳动中解放出来的设备应运而生。搬运工业机器人就是其中的一类,而工业机器人与PLC的充分结合,会显著提高自动化生产线的生产效率和安全性。搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学、机械学、电器液压气压技术、自动控制技术、传感器技术、单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。广数机器人有很高的自由度,5~6轴,适合于几乎任何轨迹或角度的工作可以自由编程,完成全自动化的工作可以自由编程,完成全自动化的工作提高生产效率,可控制的错误率代替很多不适合人力完成、有害身体健康的复杂工作,比如,汽车外壳点焊等工作。
2 系统工作站控制设计
工业机器人自动搬运工作站由广数工业机器人本体控制系统、三菱FX2N-32MR-D PLC控制系统、机器人搬运系统、按钮操作盒以及显示指示灯等四部分组成。实体生产线是搬运码垛机器人有序的排列的,整体布局如图1所示。
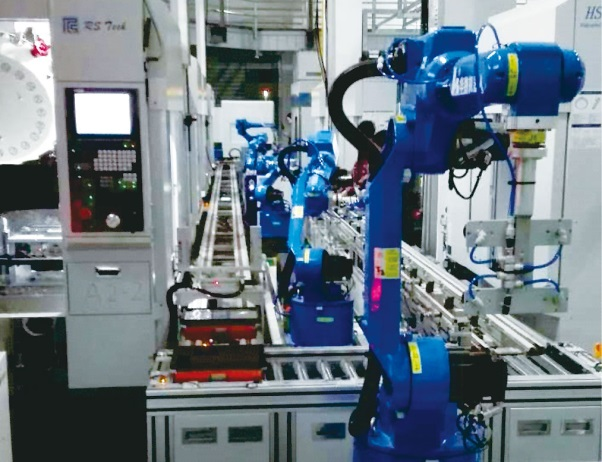
图1 整体布局图
2.1 设计要求
上电后复位灯闪,按下复位按钮,执行复位,复位完毕后开始灯才闪,按下开始按钮。水平气缸伸出,伸出至前极限,抓工件(1s),水平气缸缩回。缩回至后极限,旋转气缸右旋转,转至右极限。水平气缸伸出,伸出至前极限,放工件(1s),水平气缸缩回,缩回至后极限。旋转气缸左旋转,转至左极限,返回,完成一次循环(在适当的位置加上停止按钮重新启动按钮)。系统流程图如图2所示。(1)按启动开关后,送料工作站按照工艺流程的顺序工作。(2)启动急停开关后,推料缸在初始位置,摆缸在当前位置,吸盘必须吸住工件,且急停指示灯亮。(3)急停消除后,启动复位按钮,复位灯亮,同时复位顺序为:放料,摆缸摆回到初始位置,复位指示灯灭。
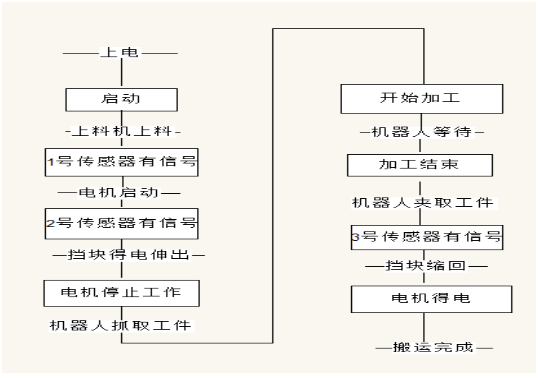
图2 系统流程图
2.2 现场示教编程
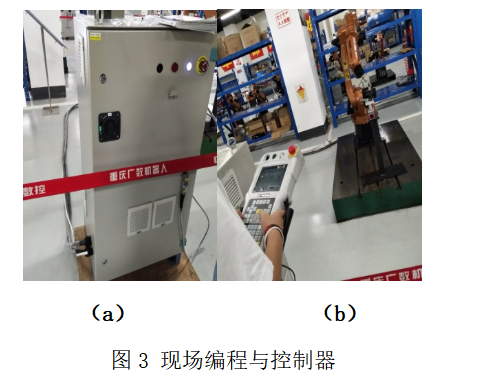
工业机器人在进行搬运之前首先要进行离线编程,主要是利用示教器取几个关键点。进行获取视教点,示教点获取完毕后进行示教。在这个过程中熟练运用三点法、五点法以及熟悉直角坐标和关节坐标用户坐标。在工作中应注意操作的安全性(退到黄线外)。现场编程与控制器如图3所示。
3 方案设计
3.1 系统框图设计
机器人通过机器人接口与三菱FX2N-32MR-D PLC之间传送信息,通过传感器、示教器、按钮气缸气爪以及一些基本的电路回路将华数工业机器与三菱FX2N-32MR-D PLC很好的结合在一起,组成了众多站中的搬运站,系统框图设计如图4所示。
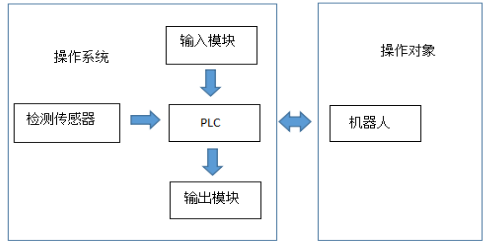
图4 系统框图
3.2 接口配置
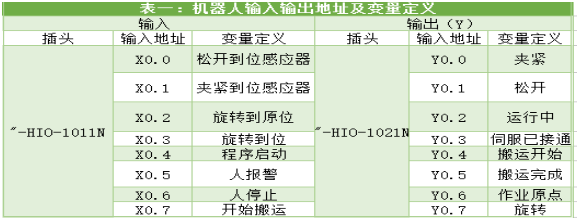
机器人的这些接口都是专用的,作用都是固定的。例如:X5为报警,Y0.1为松开。Y0.7口为高电平的时候,气爪将旋转至指定位置,如表1所示。
表1 机器人I/0接口地址及定义
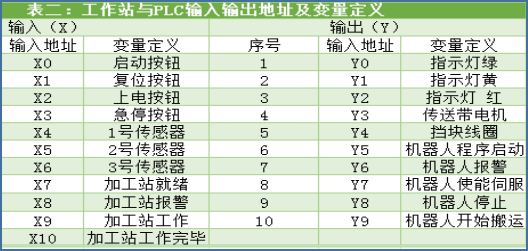
3.3 PLC的I/O接口设置
三菱FX2N-32MR-D PLC输出输入根据搬运站中实际要求设置,三菱FX2N-32MR-D PLC如表2所示。
表2 PLC的I/O接口设置
4 程序设计
广数工业机器人指令有运动指令、信号处理指令、流程控制指令和运算平移指令。根据机器人需要运动的轨迹编出合适的程序。
程序如下:
MAIN;主程序
//PX0=PX0-PX0;数据清零
//LAB1;标签1
SET B0,0;第一行第一个置位
SET B1,0; 第二行第一个置位
SET B2,0; 第三行第一个置位
PX1=PX1-PX1; 数据清零
SETE PX2(1),100; 第一行第一个赋值y轴100mm
SETE PX3(2),100; 第二行第一个赋值x轴100mm
SETE PX4(1),200; 第二行第三个赋值x轴200mm
LAB0; 标签0
MOVJ P1,V30,Z0;//物体以百分之30速度,Z0精度运行到p1;
DOUT OT1 OFF;末端执行器抓取物体
DELAY T1;延时一秒
MOVL P2,V30,Z0;//物体
SHIFTON PX1;平移开始
MOVJ P3,V30,Z0; 物体以百分之30速度,Z0精度运行到p3;
MOVL P3,V30,Z0; 物体以百分之30mm速度,Z0精度运行到p3;
SHIFTOFF ;平移结束
MOVL P4,V30,Z0;//搬运到达1点
DELAY T1;延时一秒
DOUT OT1,ON;//释放
Px4=px1+px3;第三行第一个等于第一行第一个加第二行第一个相加
INC B0;B0自加一
JUMP LAB0,IF B0<4;//每行放4个
SET B0,0;//第二行初始化
Px1=px1-px1;
Px1=px1+px2;
JUMP LAB0 IF B1<2;跳转
SET B1,0;//第三行初始化
PX1=PX1-PX1;
PX1=PX1+PX4;
INC B2;自加一
JUMP LAB0 IF B2<2;跳转
END;结束
参考文献:
[1]田涛,邓双城,杨朝岚,等.工业机器人的研究现状与发展趋势[J]. 新技术新工艺,2015(03)
[2]陈益松,白刚,严伟明. 工业机器人防护装的设计与开发[J]. 上海纺织科技,2015(01)
、
作者简介:
成平(1997-) 男 汉族 重庆城市职业学院 研究方向为工业机器人应用






共0条 [查看全部] 网友评论