
关键词:动中通;姿态估计;扩展卡尔曼滤波;四元素
Abstract: This article is based on the design of the STM32F405 Satcom-on-the Move attitude measurement module, using MEMS gyroscope, accelerometer and GPS/Beidou module; using four elements as state variables, the attitude angle estimation is carried out through the EKF filter algorithm. Experimental application shows that the algorithm successfully combines the short-term accuracy of the gyro, the long-term stability of the accelerometer, the short-term dynamic accuracy of the azimuth angle is ±0.5°, and the dynamic estimation accuracy of pitch and roll is within ±0.4°, which satisfies Application requirements for communication in motion.
Key words: Satcom-on-the Move; Attitude estimation; Extended Kalman filter(EKF); Four elements
1 引言
“动中通”作为一种搭建在汽车、火车、飞机(含直升机)、轮船等移动载体上,并在载体运动过程中仍能够保证与地球同步卫星实现双向通信的平台;“动中通”可在载体运动过程中实现宽带卫星通信,传输视频图像、语音、数据信息,在军民领域都有广泛的用途[1]。为了实现运动载体天线与卫星之间正常通信,就要求天线波束实时对准卫星;那么动中通天线实时控制就需要精准的姿态测量单元检测出载体的姿态变化,因此姿态测量模块是动中通天线系统中关键部件,姿态测量模块直接影响动中通天线系统性能。
2 动中通姿态测量硬件
动中通姿态测量单元硬件由STM32F405单片机、三轴陀螺仪模块、三轴加速度计模块、GPS/北斗模块、电源转换电路组成。
STM32F405XX系列基于高性能ARM®Cortex®-M4 32位RISC核心,工作频率高达168MHz。Cortex-M4内核具有一个浮点单元(FPU)单精度,支持所有ARM单精度数据处理指令和数据类型。它还实现了一套完整的DSP指令和一个内存保护单元(MPU),提高了应用程序的安全性,详见文献[2]。
陀螺仪模块选用ADI高性能数字输出MEMS陀螺仪ADXRS453,其主要特性:角速率检测:±300°/s、抗振性:0.01°/sec/g、零点偏置稳定性:16°/小时、抗冲击能力:2000g、工作温度范围:-40℃~105℃,详见文献[3]。
加速度计模块选用ADI微功耗三轴数字输出MEMS加速计ADXL362,其主要特性:加速度检测:±2g/±4g/±8g可选、高分辨率:1mg/LSB、超低功耗:270nA工作模式,10nA待机电、工作温度范围:-40℃~85℃,详见文献[4]。
动中通姿态测量模块硬件框图如图1所示。
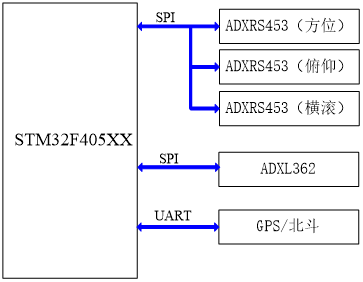
图1 动中通姿态测量模块硬件框图
STM32F405单片机通过SPI与三片陀螺仪模块ADXRS453连接,采用片选分时与每片陀螺仪模块进行通信,获取三轴角速度信息;STM32F405单片机与ADXL362采用SPI通信方式,获取三轴加速度信息;STM32F405单片机与GPS/北斗采用UART通信方式,获取GPS/北斗航向角和速率信息。
3 动中通姿态测量软件
动中通姿态测量软件主控程序包括ADXL362获取加速度计数据、加速度数据校准、获取ADXRS453陀螺仪数据、陀螺仪数据校准、获取GPS/北斗航向角度、EKF滤波、三轴姿态数据串口,主控程序软件流程图如图2所示。
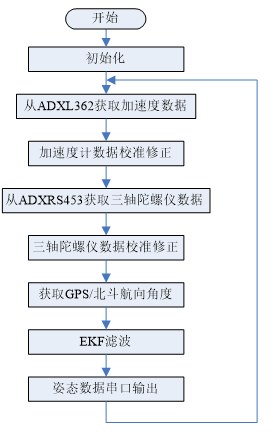
图2 动中通主控软件流程图
EKF滤波算法流程图如图3所示,计算状态转移矩阵和系统协方差矩阵、估算状态量和误差协方差矩阵、计算观测矩阵和观测噪声协方差矩阵、计算EKF增益、更新状态矩阵和协方差矩阵。
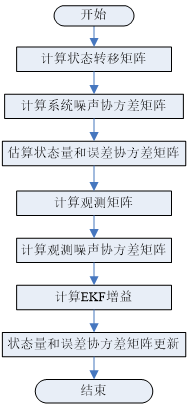
图3 EKF滤波流程图
4 基于EKF滤波算法
MEMS陀螺仪的零偏稳定性较差,通过积分得到的角度,短期内可信,长时间误差较大。而加速度计利用重力计算角度较准,不随时间推移发生,但加速度计受离心力和直线加速度影响,GPS/北斗模块可以提供航向信息作为参考,因此将三者进行融合提高三维姿态角的精度,采用扩展卡尔曼滤波的方式,将四元素作为状态量,加速度计的敏感量作为观测,对四元素进行实时估计,得到修正后的横滚,俯仰和航向角。
a) 状态量的选择
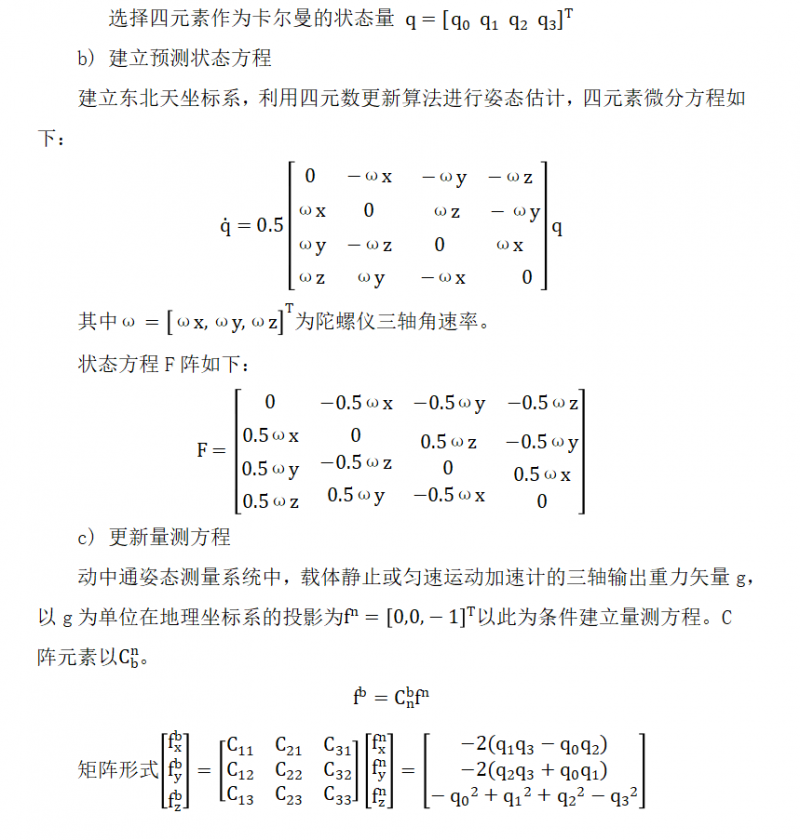


5 实验结果
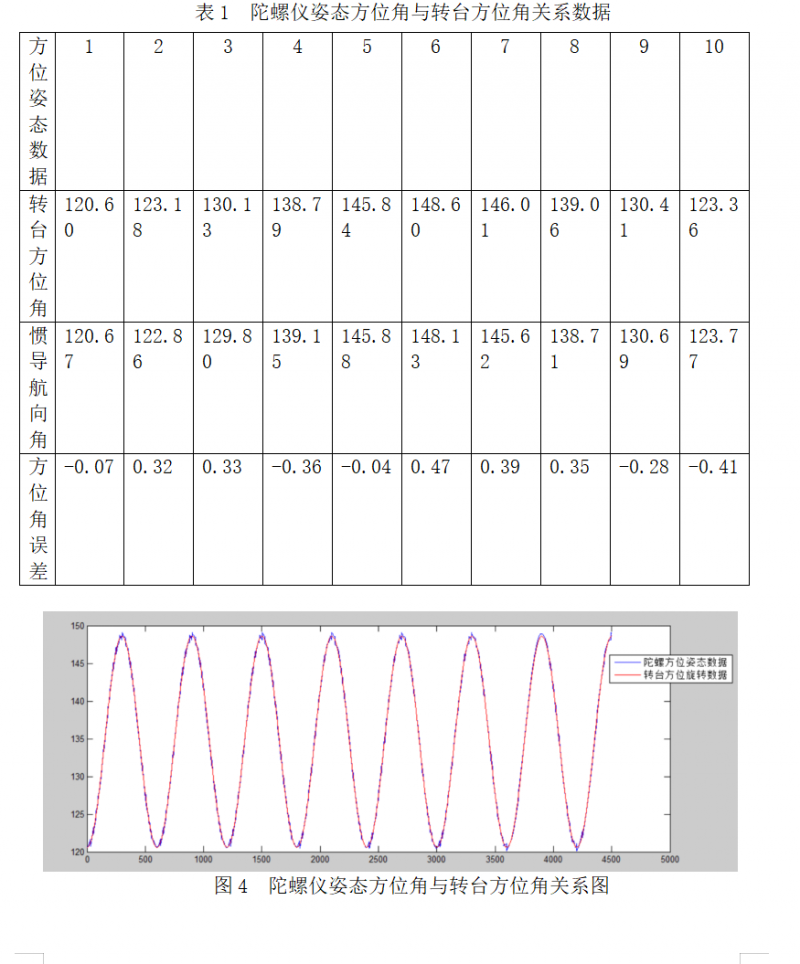
把动中通测量模块放到三轴转台上,控制转台按照旋转,同时测量记录转台和测量模块数据(实际测试数据600个点一个周期,表1-表3数据为每隔60个点记录一个数据),分别记录转台和动中通测量模块的方位角、俯仰角和横滚角。
a) 方位航向姿态测试(短时间转动测试,长时间方位会漂移)
b) 俯仰测试验证
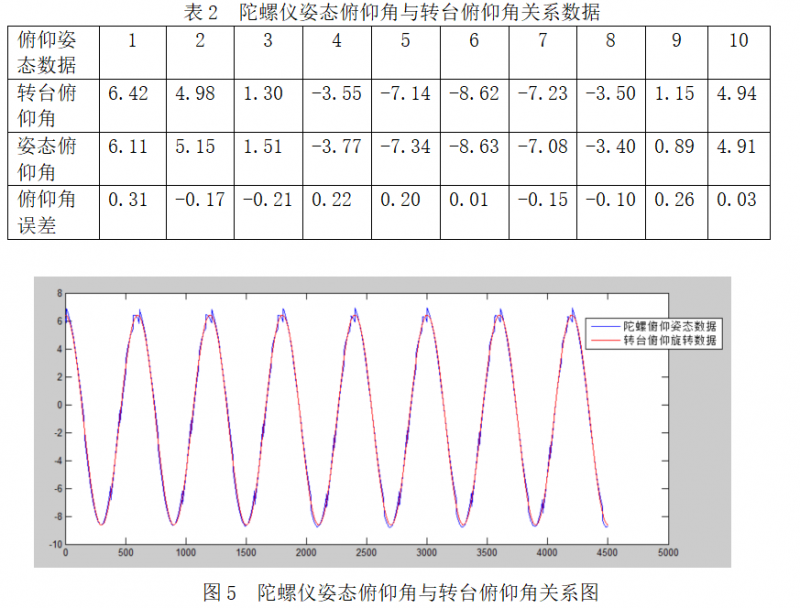
图5 陀螺仪姿态俯仰角与转台俯仰角关系图
c) 横滚测试验证
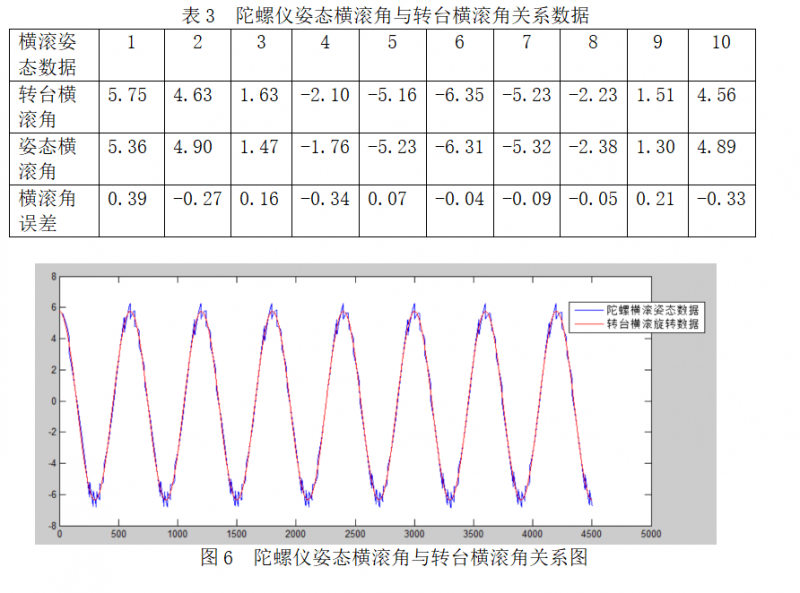
从以上表格及对应误差曲线图可以得知,方位角误差精度在±0.5°,俯仰角和横滚角度误差在±0.4°范围内,因此利用EKF滤波算法,可以得到满意的姿态角估计,满足VASAT动中通姿态测量需求。
6 结论
本文基于STM32F405为核心的动中通姿态测量模块,采用MEMS陀螺仪、加速度和GPS/北斗模块,通过EKF滤波算法进行姿态角度估计,短时间方位误差精度±0.5°,俯仰角和横滚角度稳定误差在±0.4°,满足动中通姿态测量需求。
参考文献:
[1] 邱建彪.卫星移动通信中地面移动载体天线终端的研究与设计[D]. 电子科技大学.2010
[2] STM32F405xx Doc ID 022152 Rev 2[M]. STMicroelectronics,2012
[3] High Performance Digital Output Gyroscope ADXRS453[M]. Analog Devices, Inc,2011
[4] Micropower Three-Axis ±2g/±4g/±8gDigital-Output MEMS Accelerometer ADXL362[M].
Analog Devices, Inc,2012
作者简介:
陈著明,联系电话:13682423607;单位:中国航空技术深圳有限公司;地址:深圳市福田区华富路1018号中航中心10楼(中航国际)




共0条 [查看全部] 网友评论