



关键词:智能飞行;飞行实时操控;通信模块;导航设计
Abstract: There are infinite possibilities in the application field of UAV, and more and more UAV development directions have been found: one station multi aircraft, intelligent flight, mind control and amphibious in water and air. Therefore, a new type of water air amphibious variable wing unmanned control system is designed to better realize all operation actions of water air amphibious UAV and ensure the stable flight of UAV.
Key words: Intelligent flight; Real-time flight control; Ground control terminal; Communication module
1 引言
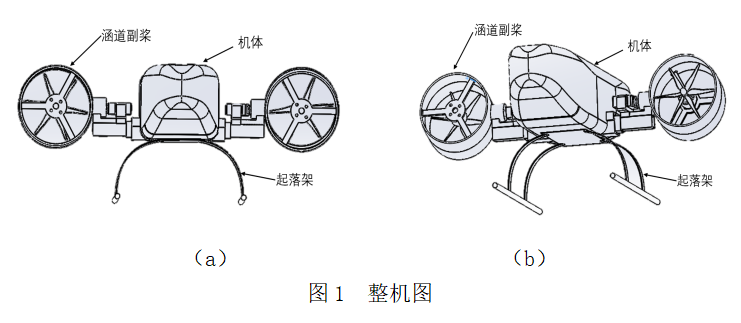
水空两栖无人机的概念起初是作为军事用途而被提出,但是随着其不断地发展,多种多样的功能与用途被开发出来。作为一个多空间应用的无人机,水空两栖无人机结合了无人机与潜水艇的优势,不仅可以在空中发挥作用,而且还可以进入水中进行特种作业。水空两栖无人机在军事领域、海洋救援领域、娱乐领域和海洋勘测等领域都有着很大的发展空间。同常规无人机一样,水空两栖无人机也是一种搭载平台,在无人机原有的技术背景下,搭载不同的功能模块,适应不同的应用场景。水空两栖无人机可以在水空两域随意切换,结合了空中活动视野广,水下活动灵活隐蔽的优点。本机的实物整机图如图1所示。
2 控制系统功能
针对水空两栖无人机的作业特点,本项目组设计了适配于水空两栖无人机的飞行控制系统,该系统能够实现同地面站建立稳定的数据通信链路、无人机飞行姿态与空间坐标的实时获取、无人机空中飞行与水下航行的稳定控制和地面终端的控制信号与突发事件实时响应处理的功能,图2为飞行控制系统功能框图。
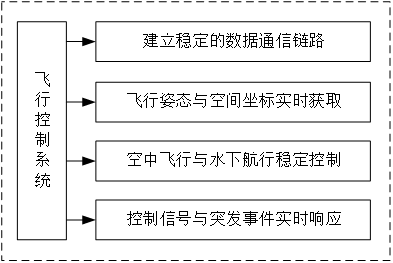
图2 飞行控制系统功能框图
根据水空两栖无人机的控制要求,新型水空两栖变翼式无人机飞控系统任务线程包括:算法线程、高度线程、遥测线程、IMU线程、油门线程、导航线程、GPS线程以及其他辅助任务线程。飞行控制系统分为五层:信息获取层、信息传输层、信息存储层、动作响应层、自主导航层。信息获取层分为飞行状态信息获取和实时图像信息获取两部分。
飞行状态信息获取分为飞行姿态信息获取和飞行坐标获取两部分。飞行姿态信息获取是指通过IMU惯性测量模块获取传感器的原始数据——三轴加速度、三轴角速度、三轴磁场强度,经去零漂、滤波处理后,使用Mahony互补滤波算法解算出无人机实时姿态角。
地面端软件(或多通道遥控器)输出控制信号,通过无线数传模块(或遥控接收机)发送给飞行控制系统,飞行控制系统根据输入信号与当前无人机飞行状态,快速稳定的执行对应动作,实现水空两栖无人机在水下及空中的稳定飞行。
同时为了更好地展示本无人机控制系统对无人机运行的可靠性,如图3所示进行了想应的流体力学仿真,结论展示本设计对无人机飞行方面有相应的提高。流体模拟仿真如图3所示。

飞行控制系统是水空两栖无人机的重要组成部分,其性能好坏直接关系着无人机能否安全可靠地飞行。水空两栖变翼式无人机飞控移植小型嵌入式操作系统FreeRTOS对无人机所有实时任务进行统一的调度管理,以满足无人机对飞控实时性、稳定性、精确性的要求。FreeRTOS是一款开源实时操作系统,主要由C语言编写,FreeRTOS允许多个任务同时运行,其任务调度器是可预测的,任务调度器在各个任务之间切换迅速,能够对环境中的事件做出实时的响应。
3.1 无人机飞控构架
根据水空两栖无人机的相关控制要求,本水空两栖无人机飞控系统任务线程包括:算法线程、高度线程、遥测线程、IMU线程、油门线程、导航线程、GPS线程以及其他辅助任务线程。如图4所示。
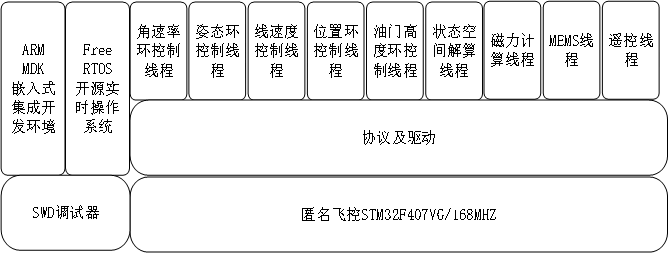
图4 飞控系统构架
3.2 FreeRTOS操作系统移植
根据水空两栖无人机的具体控制任务要求,使用STM32F407作为主控,在Keil_MDK集成开发环境下进行了FreeRTOS嵌入式系统的移植,并完成了水空两栖无人机任务函数的编写。
4 通信模块
无人机通信链路模块由遥控链路、遥测数传链路、遥测图传链路三大部分组成,主要用于地面站操控人员对水空两栖无人机实时飞行状态的获取、控制与定位。
4.1 遥控链路
无人机的遥控链路模块由遥控器与遥控器接收机组成,它负责将地面操控人员的控制指令发送到机载飞控上,以便飞控按照接收的指令执行动作。使用工作频段为2.4GHz的射频信号遥控器来对无人机进行飞行控制,遥控器编码信号按一定协议调制后,由高频放大电路发射出去,其空中有效通讯距离大于1000m。
使用PPM接收机对接收到的编码数据进行解码,其接收高频载波调制信号,输出按PPM编码的方波信号,最多支持8路遥控信号输入。如图5所示。

图5 PPM接收器
4.2 遥测数传
无人机的遥测数传链路由无线数传模块与地面站软件两部分组成。数传模块包括机载收发模块与地面站收发模块。
无人机遥测数传链路模块硬件使用NRF24L01无线模块,其工作于2.4GHz~2.5GHz ISM频段,支持SPI通信协议,最大通信距离可达1000m。无人机遥测数传链路模块与地面端上位机通信时按照项目组自定义的数据协议进行通信,以保证水空两栖无人机与地面站数据传输过程的安全与稳定。
4.3 遥测图传
水空两栖无人机的无线图传系统属于移动视频图像传输系统,是无人机的重要载荷部分,提供机载设备图像系统的数据链路通道,负责将机载图像采集数据实时传输到地面接收设备上,供实时观察与存储,以及图像分析等后续处理。
5 导航系统设计
无人机的自主导航主要包含自主定位与自主控制两大概念,自主导航的功能是让无人机能够确定自己所处的空间位置坐标,自主控制的功能是根据预设的飞行航线来控制无人机运动。无人机的导航定位分为捷联惯性导航(SINS)与全球卫星导航(GPS)。项目组使用GPS自主导航技术。
5.1 导航方案
水空两栖无人机使用BN-880GPS导航模块进行无人机的自主定位与自主控制,BN-880GPS模块支持GPS与GLONASS双模定位,内置Flash,支持串口输出,输出信号遵循NMEA-0183协议。
5.2 辅助模块
使用SDHC Card对水空两栖无人机的传感器原始数据、姿态信息、速度信息、位置信息、图像信息和机载设备的健康信息等进行统一的存储管理,有利于对水空两栖无人机的调试优化工作。
本无人机飞控使用STM32F407VG作为主控,STM32F40x系列控制器支持SD卡规范版本2.0,无人机飞控允许的最大外接SD卡为4GB。
6 新型水空两栖无人机广阔应用前景
20世纪90年代以前,无人机多为军事用途,尽管也有民用尝试,但成功案例并不多;20世纪90年代以来,全球定位与导航技术、微电子技术、无线电通信技术、无刷电机技术、数码相机技术的兴起使得无人机民用化进程获得重大突破。21世纪以来,非军用无人机发展进程明显加快,并从工业级用途拓展到消费级用途,呈现多点开花局面。
数据显示,2018年中国民用无人机市场销售规模达到32.74亿元。随着无人机应用领域的逐渐扩大,无人机市场需求逐渐提升。图6为中国民用无人机市场规模趋势图。
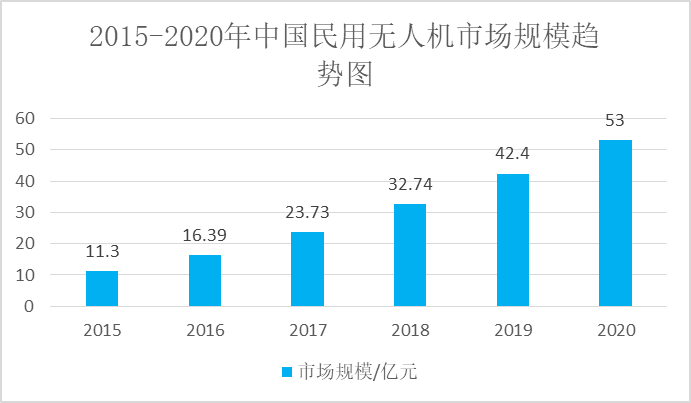
图6 民用无人机市场规模趋势图
随着生活水平不断提高,越来越多的摄影爱好者已不满足在陆地上拍摄,航拍、水下摄影是现在年轻人中的潮流,由于水空两栖无人机保留了无人机和潜水器的特点,既可以进行航拍又可以进行水下拍摄,对于摄影爱好者来说,水空两栖无人机为他们提供了更加便捷的拍摄工具。
自2009年《海洋》生态纪录片开映以来,许多人都被海底神秘的生态吸引,越来越多的环境保护主义者关注海底生态环境,希望通过拍摄纪录片来倡导人们保护海底环境。对他们来说,这种新式的水陆两栖无人机可以成为他们拍摄海洋生物的好助手。
目前无人机市场的火热,必将带动水空两栖无人机市场的发展。水空两栖无人机将会因其空中活动视野广,水下活动灵活隐蔽的特点而应用于以下的场景:海洋生物追踪与检测、娱乐项目开发、海洋救援、潜艇物资补给、军工项目开发等。水空两栖无人机将成为无人机市场的一个热门方向。
7 结束语
现有无人机可以飞行到空中,对地面进行大面积探测。凭借其飞行高度的提升,我们可以获得视野更广阔的画面,无人机对于大范围搜索有着极其重要的意义。在空中,无人机有着广阔的应用;但是对于水域,无人机的探索却受到极大的限制,同时现有的水空无人机的设计及控制系统也急待升级。所以创新性的水空两栖变翼式无人机控制系统设计会大大提高无人机的运行效率与运行地域。会将现有无人机技术提升新的台阶。
参考文献:
[1]杨晓飞,於慧敏,孟子晗,梁辰雨. 一种用于辅助搜救的两栖飞行器设计[J]. 扬州大学学报(自然科学版),2019,22(03):31-35.
[2]我国无人机行业发展现状与前景分析[J]. 军民两用技术与产品,2020(07):10-19.
[3]郑卫刚,林舒鑫,吴昊,饶昆鹏,李君宇,刘洪志. 城市消防应急无人机系统[J]. 智慧工厂,2018(01):66-68+71.
[1]何金,丁勇,杨勇,黄鑫城. 未知环境下基于PF-DQN的无人机路径规划[J]. 兵工自动化,2020,39(09):15-21.
[5]连婷婷,崔利杰.无人机系统的安全性与危险源分析[J]. 航空工程进展,2020,11(04):517-523.
[6]李玉珠,郑卫刚. 浅谈一流大学工程训练中心软实力及巧实力建设[J]. 网友世界,2012(12):56-58.
[7]郑卫刚.简述智能机器人及发展趋势展望[J].智能机器人,2016(04):41-43.
作者简介:
郑卫刚(1967-)男, 湖北武汉人,技师,大学,主要研究方向为机电技术,发表论文300余篇。
项目支持:国家级大学生创新创业训练计划资助 S202010497202






共0条 [查看全部] 网友评论