
关键词:电力电子技术;控制理论;BOOST变换器;仿真分析
Abstract: In order to ensure perfect function and good performance, the power electronic converter must have a reasonably designed automatic control system. After describing the circuit topology and transfer function of common regulators or compensators, taking the simplest boost DC-DC converter circuit as an example, this paper gives the design process and stability analysis method of its control system. The purpose is to inspire students to learn how to design the basic control system of power electronic converters.
Key words: Power electronic technology; Control theory; Boost converter; Simulation analysis
1 引言
作为工程科学的一个分支,自动控制技术是指在无人直接参与情况下,利用外加控制器,一般为有源控制器,使机器设备或生产过程的工作状态或参数自动地按照预定的规律运行[1]。自动控制历经了经典控制理论和现代控制理论,正向以控制论、信息论、仿生学、人工智能为基础的智能控制理论发展。根据控制原理的不同,自动控制系统分为开环控制系统(包括顺序控制系统)和闭环控制系统(即反馈控制系统)。根据给定信号分类,自动控制系统可分为恒值控制系统、随动控制系统和程序控制系统。电力电子变换技术是关于电力技术、电子技术以及控制理论的交叉技术,除了少数无源类型的变换器无需主动控制外,绝大多数变换器都需要采取主动控制。一般地,自动控制系统包括控制器、被控对象、执行机构和变送器组成。电力电子变换器的功率电路以及期望产出为控制对象,执行机构类似驱动电路,变送器相当于检测电路,控制器包括数字控制器和模拟控制器,需要完成调制算法和控制策略以及负载需要的调功或调速方法。电力电子变换器的控制方式包括基于给定和扰动的开环控制、基于反馈的闭环控制以及复合控制,需要使用各种模拟或数字调节器,即补偿器,用于调节系统的静态特性和动态特性,确保控制系统开环频率特性具有足够的幅值裕度与相位裕度[1]。
在现有的电力电子技术的教学大纲中,尚未将自动控制理论的应用作为主要内容[2-11],主要考虑因素是课时有限且自动控制原理为同期课程,学生尚未具备自控基础。实际情况是,在本课的后半学期,学生已经学到了基本的自动控制理论,适合以BUCK或BOOST等简单变换电路为例,讲解如何设计DC-DC变换器的控制器,可以占用一次课或一个学时。这样,通过实例讲解可以将电力电子变换器工作原理、基本控制结构、稳定性判断方法、模拟电路、电工理论结合起来,也会让学生明白离散控制、数字控制的含义,为今后继续学习相关知识打下基础。
2 常用调节器电路与传递函数
2.1 运算放大器基础知识
在控制电路中,集成运放广泛用于信号放大、增益调整、阻抗匹配、有源校正等多种用途。集成运放用作增益调整时,运放可分为通用型、高输入阻抗型、漂移补偿型、高速宽带型以及大功率型[12]。
根据运放产品手册,则反馈电阻Rf的最佳取值公式为[12]
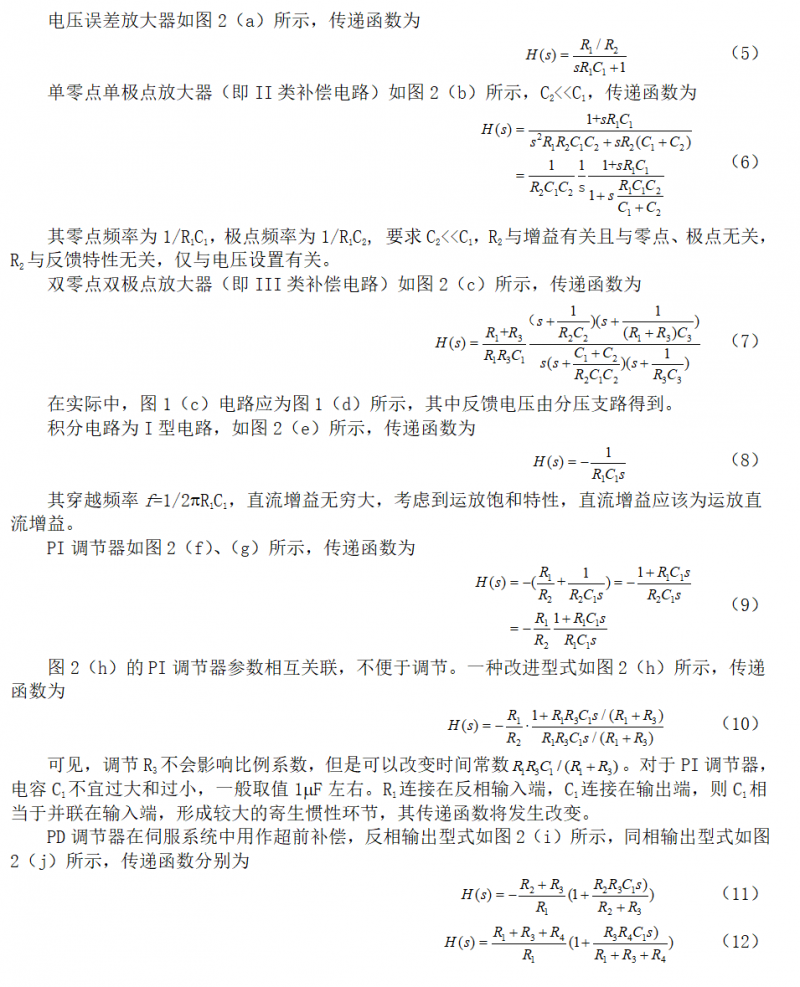
采用以上有源校正电路时,可以直接写出传递函数,传递函数等于反馈支路阻抗除以反相端输入阻抗的负值。
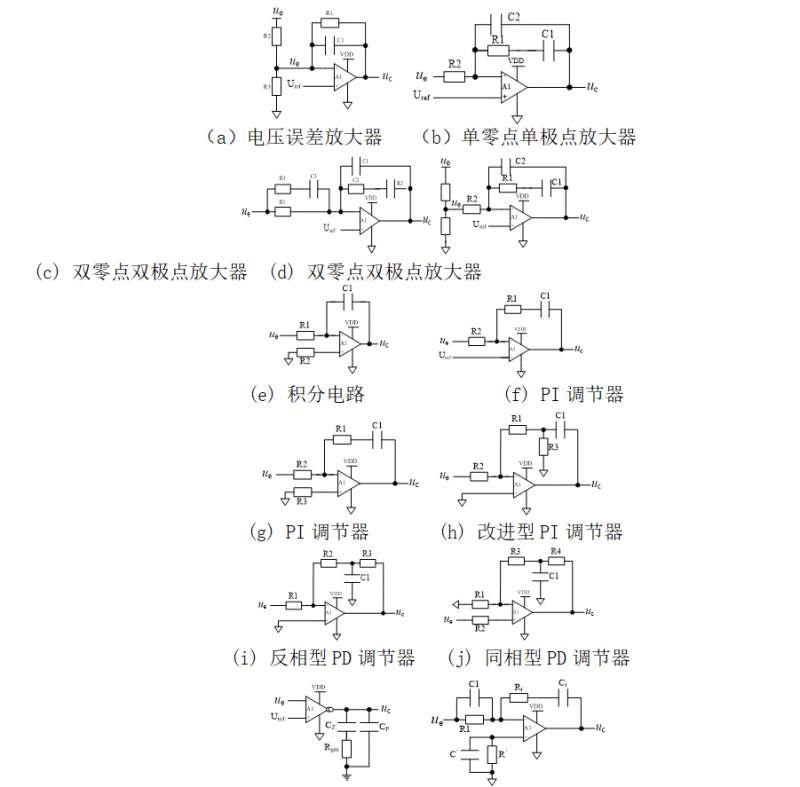
(k)跨导型放大器 (l) PID调节器
图2 电压外环与电流内环控制器
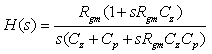
跨导型电压或电流调节器如图2(k)所示[13],当跨阻为![]() 时传递函数为
时传递函数为
 (13)
(13)
跨导放大器的输入信号是电压,输出信号是电流,其增益成为跨导,用Gm表示。集成跨导放大器可分为两种,一种是跨导运算放大器(OTA),另一种是跨导器。跨导运算放大器均为双极型的,跨导器几乎全部是CMOS型,二者都是线性电压控制电流源。双极型OTA的跨导增益值较高,增益可调而且可调范围也大(3~4个数量级);CMOS跨导器的增益值较低,增益可调范围较小,或者不要求进行增益调节,但它的输入阻抗高、功耗低,容易与其它电路结合实现CMOS集成系统。跨导放大器内部只有电压-电流变换级和电流传输级,电流模式部分起决定作用,没有电压增益级,因此没有大摆幅电压信号和密勒电容倍增效应,高频性能好,大信号下的转换速率也较高,同时电路结构简单,电源电压和功耗都可以降低。因为在模拟控制电路中得到了广泛的应用。
2.3 PID控制器的基本原理
PID控制器广泛应用在机械设备、气动设备和电子设备,在工业应用中PID及其衍生算法是应用最广泛的算法之一。PID指“比例”、“积分”、“微分”, PID控制器包括模拟和数字两类,PID模拟调节器如图2(l)所示,其控制结构如图3所示[14]。
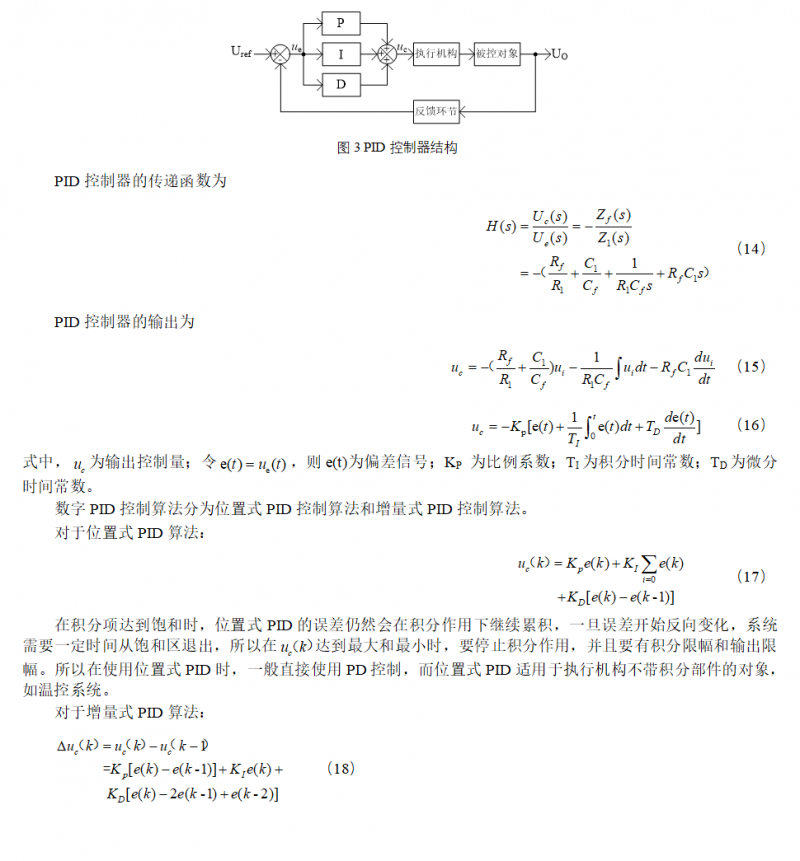
增量式PID控制量Δu(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差,因而没有误差累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统出现问题时,增量式不会严重影响系统的工作。位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅。
在z域,PID调节器以及二自由度PID调节器的传递函数分别为
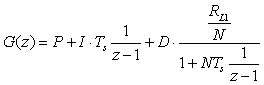 (29)
(29)
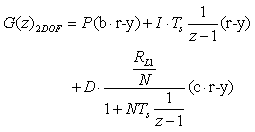 (30)
(30)
2.4 抗饱和积分电路工作原理
含有积分环节的控制器都存在积分饱和问题,,一旦控制系统出现扰动,控制偏差的极性变反,控制器的输出需要缓慢退出深度饱和区,使得克服反向扰动速度降低,由此恶化系统的控制品质。
防积分饱和方法包括:
(1)采用比例控制器,则不存在积分饱和问题,但会使控制系统产生静差;
(2)采用限幅装置,则可使控制器的输出不超越控制器的限定输出范围,但是不能改善克服反向扰动的控制品质;
(3)采用积分分离,则在系统误差较大时取消积分环节,当误差较小时引入积分环节;
(4)采用反馈抑制抗饱和,根据饱和程度的不同来调节反馈系数,饱和程度越深,反馈系数越大;
(5)采用PD控制器,与纯比例控制器相比,能够减少超调,还能减少系统静差,但不能消除静差。如允许有较小静差时,则采用PD将优先于PI,即不存在积分饱和问题;
(6)采用串联PID控制器[14],可以解决负荷和设定值发生变化但不允许存在超调和静差时的积分饱和问题;
(7)采用改进型PI控制器,当控制器的输出还没有达到开始饱和点时,低选器通过两个输入信号中较小的,如图4所示。
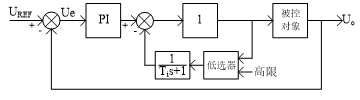
图4 结构改进PI控制器
2.5 不同无源滤波器的传递函数
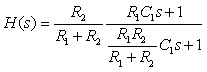
RC滤波器的电路如图5(a)所示,传递函数为
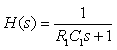 (19)
(19)
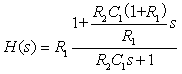
RCR滤波器的电路如图5(b)所示,传递函数为
 (20)
(20)
RCR滤波器的电路如图5(c)所示,传递函数为
 (21)
(21)
LRC滤波器的电路如图5(d)所示,传递函数为
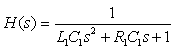 (22)
(22)
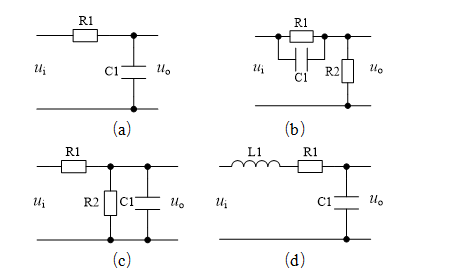
图5 无源滤波器电路
2.6 不同负载类型的传递函数
对于BOOST电路,对于纯阻负载,因为分流阻抗与系统负载并联,在幅值上相等,等效阻抗为![]() ,传递函数为[13]
,传递函数为[13]
 (23)
(23)
在功率电路传递函数中,极点对应频率为
 (24)
(24)
对于恒功负载,则分流阻抗与系统负载相互抵消,等效阻抗无穷大,则传递函数简化为
 (25)
(25)
在功率电路传递函数中,极点为原点。
对于恒流负载,电流源阻抗无限大,等效阻抗刚好等于分流阻抗,则传递函数为
 (26)
(26)
在功率电路传递函数中,极点对应频率为
 (27)
(27)

对于某些负载,如单相电压源逆变器并网系统,输入电流断续,按照开关周期求取的平均功率存在直流分量和二次振荡部分,此时负载传递函数比较复杂。
3 BOOST电路双闭环控制
3.1 BOOST电路双闭环设计思路
BOOST电路如图6所示,图中,S1为功率MOSFET,L1为功率电感,D1为反向快恢复二极管,C1为储能电容,R1为纯阻负载。![]() ui为输入直流电压,无纹波时为Ui
ui为输入直流电压,无纹波时为Ui![]() 。
。![]() u0为输入直流电压,无纹波时为UO。
u0为输入直流电压,无纹波时为UO。
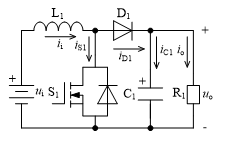
图6 BOOST DC-DC变换器
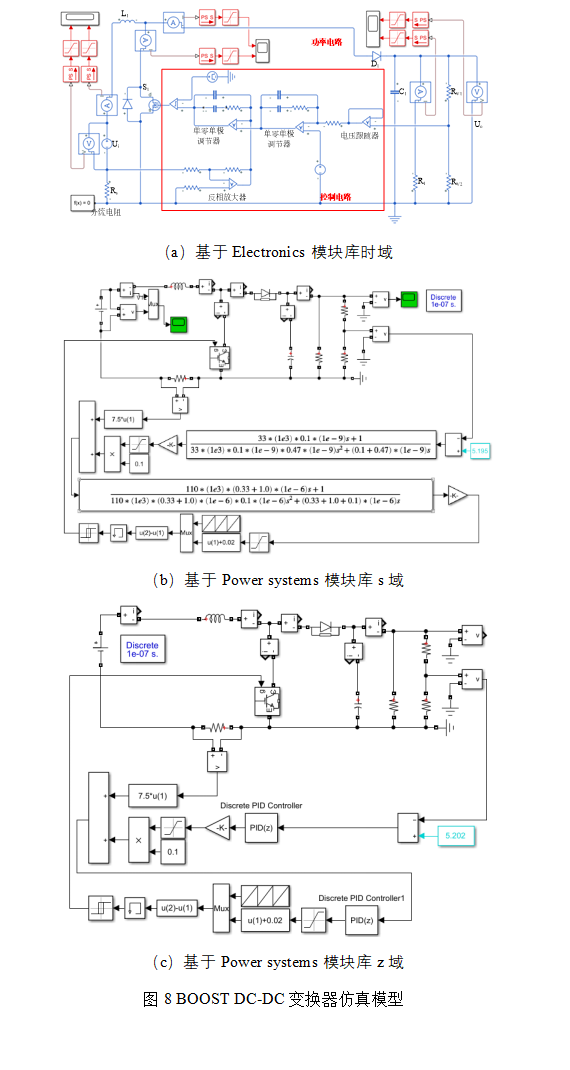
采用电压外环和电流内环的双闭环控制的BOOST电路的SIMULINK仿真电路如图7所示,图中包括功率电路和双PI控制电路
电流内环控制结构如图9所示,单零单极电流内环控制电路如图10所示。
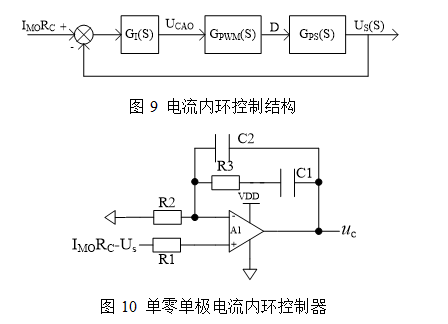
GI(S)为内环补偿器传递函数,一般为单零单极放大器、PI调节器或PR调节器;GPWM(S)为脉冲形成环节的传递函数,GPS(S)为功率变换电路的传递函数,GPS(S)=US(S)/D(S)=UoRs/SL1,其中US(S)=ILRs,D(S)为脉冲占空比。
 (31)
(31)
开环传递函数为
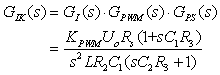 (32)
(32)
可见,这是一个二型无误差系统,可以无误差地跟踪输入直流电压。
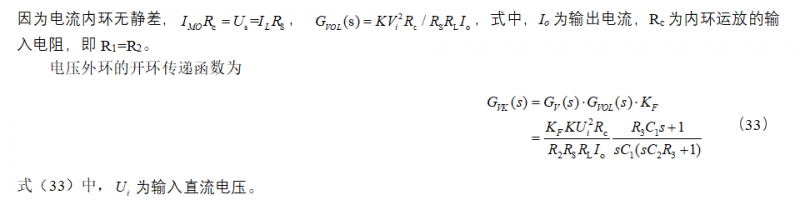
电压外环控制结构如图11所示,单零单极电压外环控制电路如图12所示。
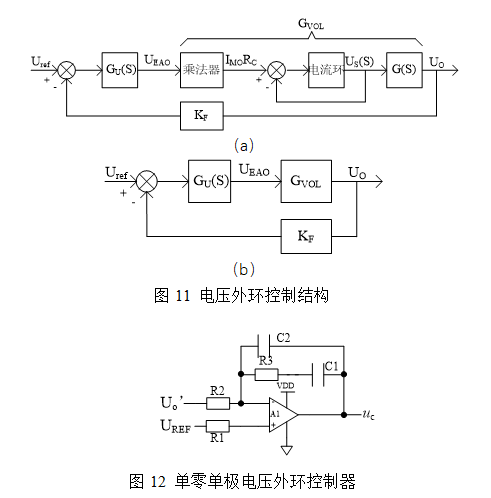
可见,这是一个I型无误差系统,可以无误差地跟踪给定输出直流电压参考。
3.2 BOOST电路稳定性分析
在设计完控制结构后,需要进行控制系统的稳定系判断,对于线性系统可以采用:
(1)劳斯-赫尔维茨稳定判据:闭环传递函数的特征方程D(s)的各项系数均为正,由各项系数所构成的主行列式及其顺序主子式全部为正。当特征方程次数较高时,可以采用李纳德-戚帕特稳定判据;
(2)根轨迹法:闭环传递函数的特征方程D(s)的根(即极点)在s平面上变化的轨迹;
(3)开环系统频域下奈奎斯特稳定判据以及对数频域稳定判据,需要绘制bode图验证相角裕度和频率裕度。在获得控制结构时,需要确定控制参数,为此可以采用MATLAB/Simulink环境提供的稳定性分析工具进行仿真试凑,常用bode图进行分析和设计,尽量确保开环增益足够大(如15dB),相位裕量足够大(如45°),并有足够的带宽[16-17]。
下面给出一种设计举例:满载1kW时,直流输入电压为100V,电压环幅频和相频响应如图13所示。此时,交越频率为5Hz,相位裕量约为28.2°。该结果基本满足交越频率和相位裕量的设计要求。
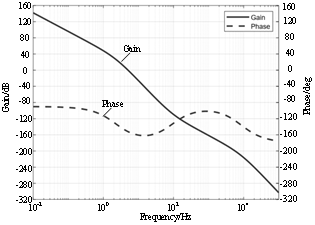
图13 BOOST DC-DC变换器幅频与相频曲线
对于图6所示BOOST DC-DC变换器,开关频率50kH、输入直流电压为100V,期望输出直流电压为400V,可得驱动脉冲占比为0.75,电感电流、功率开关电流、反向快恢复二极管电流以及电源电流的仿真波形如图14所示。
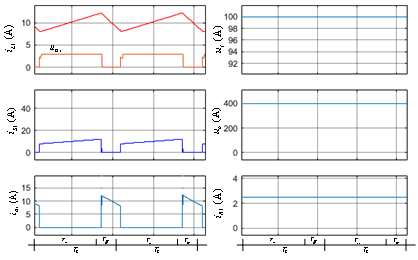
图14 BOOST DC-DC变换器主要仿真波形
4 结语
本文首先简述了运算放大器、常用补偿器、PID控制器、抗饱和积分的工作原理,然后给出了常用无源滤波器传递函数以及不同负载类型的传递函数,并以BOOST电路的双闭环控制为例,给出了BOOST电路双闭环控制结构以及电路稳定性分析,并基于Simulink Elecronics模块库搭建模拟电路控制的BOOST电路进行仿真分析。这是电力电子变换器控制系统设计的基本路线,在电力电子技术课上可以适当引入这些基本知识,有助于学生快速学会如何将控制原理应用到电力电子变换器的设计中去,对控制原理的应用不再陌生。
参考文献:
[1] 胡寿松. 自动控制原理[M]. 北京:科学出版社, 2001年第4 版.
[2] 白圣建, 于瑞航, 徐婉莹.关注学生学习体验,提升线上教学质量——“自动控制原理”课程线上教学设计与实践[J]. 电气电子教学学报, 20 21, 43(02): 101-103.
[3] 苗宇, 蒋大明, 刘泽. 基于BOPPPS的“自动控制原理”SPOC教学[J]. 电气电子教学学报, 2021, 43(01): 47-50+76.
[4] 王玲玲, 雷军委, 梁勇. 基于三种分析方法的PID控制规律的讲授[J]. 电气电子教学学报, 2021, 43(01): 77-80+88.
[5] 吴宪祥, 沈子卓, 熊雨舟, 邱亚男, 郭宝龙. “自动控制原理”二阶系统教学典型案例设计[J].电气电子教学学报, 2020, 42(04): 49-51.
[6] 苗宇, 蒋大明, 刘泽. “自动控制原理”混合式教学实践[J]. 电气电子教学学报, 2020,42(01):82-86+90.
[7] 周颖, 张燕, 王婕, 孙曙光, 梁秀霞. 工程认证下控制理论课程体系改革与实践[J].电气电子教学学报, 2020, 42(01): 57-59.
[8] 郑艳. “自动控制原理”混合式教学模式探索及教学实践[J].电气电子教学学报, 2019,41(06):44-48.
[9] 张悦, 周建新, 张瑞成, 沈小伟. “控制系统仿真”课程改革与实践[J]. 电气电子教学学报,2019,41(06):61-65.
[10] 林立, 唐杰, 邱雄迩. “电力电子及运动控制”教学方法探讨[J]. 电气电子教学学报,2012,34(04):114-115.
[11] 陈仲. “电力电子装置及控制”课程教学设计的研究与探索[J]. 电气电子教学学报, 2008(S1):34-38+41.
[12] 秦继荣,沈安俊. 现在直流伺服控制技术及其系统设计[ M]. 北京:机械工业出版社,2002年7月第一版第三次印刷.
[13] 侯孝涵, 靳洋, 姜建国, 杨喜军, 唐厚君. 新型低感值准无桥有源功率因数校正器[J]. 电气传动, 2020, 50(10): 118-124.
[14] 刘金坤. 先进PID控制及其MATLAB仿真[ M]. 北京:电子工业出版社,2003年01月第一版.
[15] 杨平,邓亮,徐春梅,李芹. PID控制器参数整定[ M]. 北京:中国电力出版社,2016年10月第一版.
[16] 张卫平,陈亚爱,关晓菡,曹靖. 开关变换器的建模与控制[ M]. 中国电力出版社,2006年01月第一版.
[17] 普利斯曼, 比利斯, 莫瑞, 著. 王志强, 译. 开关电源设计[ M]. 电子工业出版社,2010.
基金项目:2020年上海交通大学教学发展中心基金项目(项目编号:CTLD20J 0037)
第一作者:杨喜军(1969- ),男,博士,副教授,主要从事电力电子与电力传动的教学研究工作,E-mail: yangxijun@sjtu.edu.cn。
-----------------------------------------------------------------------------------------------------------------------------------------




共0条 [查看全部] 网友评论