



Research on the excessive phase uninterrupted power supply technology based on the independent power supply of transformer secondary side winding
沈培富1,裴冰1,李晓波1,姜元昊2
(中车永济电机有限公司,山西 永济 044500)
(中车大连电力牵引研发中心有限公司,辽宁 大连 116052)
关键词:独立绕组供电;不间断供电;相位同步控制;电力机车
Abstract: When the electric locomotive or EMU is excessively phased, the auxiliary system of the transformer's secondary winding power supply is generally unable to synchronize the mesh voltage phase of the network side voltage and the mesh side voltage and over -current when the main interruption is closed. The power supply function fails. On the basis of the analysis of the uninterrupted power supply mechanism, the article proposes a synchronous control method based on the preset phase to achieve excessive phase. Essence Through ground testing and car loading verification, this scheme can not only effectively reduce the overvoltage and over -current generated when excessive phase, but also enable the auxiliary system network pressure signal to follow the traction system network pressure signal in real time, and successfully realize the excessive phase of the auxiliary system. Uninterrupted power supply function.
Keywords: Power supply by independent secondary winding; uninterrupted power supply; synchronous control of phase; power locomotives; electric locomotive
1 引言
为保证铁路机车牵引电机满功率输出功率以及降低接触网及其供电设备的建设成本,我国电气化铁路接触网采用与电力系统三相交流电不一致的单相交流电供电[1-2]。接触网在获取电能时,采用换向供电、分段供电方式,以此确保牵引变电所的三相电源平衡[3]。同时,为了能够顺利实现分段换相供电,牵引供电网每间隔20km~25km便会设置一个分相区(无电区),分相区内采用绝缘器件或绝缘锚段关节分割不同相供电区,避免供电网发生相间短路。由于分相区内没有电,机车在每次通过分相区时,均需要动作车上负载开关,以便机车能够顺利通过分相区,严重影响着车载设备的使用寿命、司乘人员车上生活和工作条件、旅客的旅行体验[4]。为解决该问题,我国从八十年代开始研究过分相自动切换技术,并形成了地面开关自动切换方案、柱上开关自动切换方案、车上开关自动切换方案。文献[5]对三种切换方案优缺点进行了分析,文献[6]对车载过分相时分闸时电流突变引起的截断过电压和合闸产生的合闸过电压的产生原理进行了分析,文献[7]在对HXD3系列机车工作原理分析的基础上提出了过分相运行时车内辅助电源和列车供电系统不断电运行的控制策略和总体设计思路,但并未对如何实现牵引、辅助在分相区相位同步进行研究。为进一步研究过分相时辅助不间断供电技术,实现过分相时相位同步,本文提出基于预设相位的相位同步技术,通过牵引系统预设相位完成辅助系统过分相时的相位同步,实现基于变压器次边绕组供电的辅助过分相不间断供电。
2 过分相不间断供电分析
过分相辅助不间断供电要求:分相区内,辅助变流器仍可以持续为辅助负载进行供电。如图1所示为过分相时,牵引系统能量流动示意图。过分相时,牵引电机由电动机转变为发电机,牵引系统由牵引状态变为再生制动回馈状态,回馈的电能通过牵引变压器牵引次边绕组耦合至原边绕组,然后通过变压器辅助次边绕组给辅助变流器提供能量。
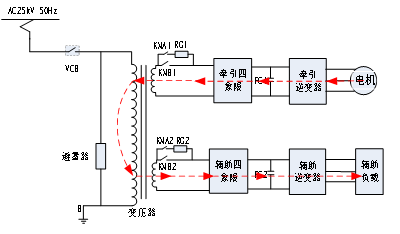
图1 过分相辅助不间断供电示意图
Fig.1 schematic diagram of over-phase assisted uninterruptible power supply
机车过分相有7种状态,如图2所示为机车过分相示意图。
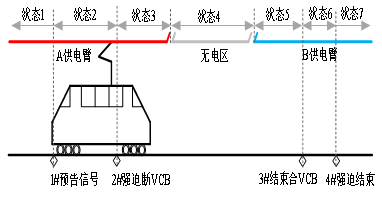
图2 机车过分相示意图
Fig.2 locomotive over-phase diagram
状态1:状态1为机车检测到过分相预告信号前且主断闭合,此时牵引电机由电动机转为发电机,逆变器转变为整流器,网络系统根据过分相磁钢信号与实际分相区的距离控制牵引系统进行减载。假设机车接收到过分相预告信号时,牵引力为Ft,逆变器转为整流器进行过分相制动最大允许的牵引力阈值为ft,机车允许的牵引力最快卸载的斜率为ΔKt,接收到过分相预告信号到接收到强迫信号时间为T。
a)牵引工况
①当Ft ≤ft时,直接转换进入自动过分相轻微制动状态,无需对牵引系统卸载;
②当Ft>ft时,若(Ft-ft)/ΔKt ≤T网络按照ΔKt斜率卸载牵引力;由于机车运行及过分相时,牵引手柄回零或者速度较高,因此运行中,不会出现(Ft-ft)/ΔKt>T的情况。
b)制动工况
假设机车接收到过分相预告信号时,牵引力为Fb,逆变器转为整流器进行过分相制动最大允许的牵引力阈值为fb,机车允许的牵引力最快卸载的斜率为ΔKb,接收到过分相预告信号到接收到强迫信号时间为T
①当Fb≤fb时,直接转换进入自动过分相轻微制动状态,无需对牵引系统卸载;
②当Fb>fb时,若 (Fb-fb)/ΔKb ≤T,网络按照ΔKb斜率卸载牵引力;由于机车运行及过分相时,牵引手柄回零或者速度较高,因此运行中,不会出现(Fb-fb)/ΔKb>T的情况。
c)惰行工况
机车处于惰行工况时,实际发挥牵引/电制动力均为0,此时Ft=Fb=0≤ft或Ft=Fb=0≤fb。网络可直接转换为自动过分相轻微制动状态,无需对牵引/电制动力进行卸载。
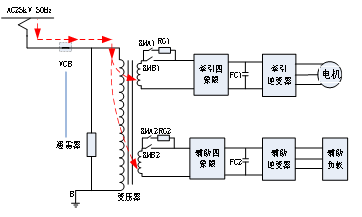
图3 过分相预告信号前且主断闭合
Fig.3 before the over-phase warning signal and the main shutdown is closed
状态2:状态2为机车检测到过分相预告信号且主断闭合,此时牵引系统进行原边电流控制,将原边电流控制到设定值,降低主断断开时对于动车组的冲击,四象限转入电压控制,当四象限控制准备完毕后,牵引系统给网络发送断主断请求。
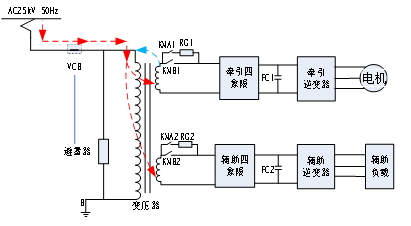
图4 过分相预告信号且主断闭合
Fig.4 over-phase warning signal and main shutdown closed
状态3:状态3为机车检测到过分相强迫信号且主断断开,此时牵引逆变器控制中间电压,牵引四象限对于构造的虚拟电网电压进行控制(包含幅值和相位),此时辅助逆变器从接受电网电压的信号开始转入到采用牵引系统构造的虚拟电网电压进行控制,具体体现为辅助逆变器采用独立绕组感应电压进行辅助四象限中间电压控制。
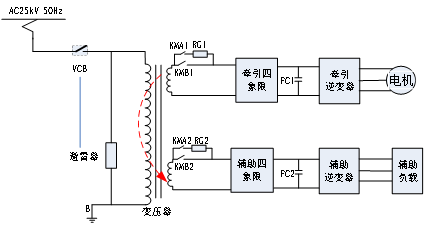
图5 过分相强迫信号且主断断开
Fig.5 over-phase forcing signal and main break open
状态4:状态4为机车进入无电区,此时牵引四象限按照虚拟电网电压进行控制.机车进入分相无电区,牵引电机处于发电状态向中间回路回馈能量,牵引逆变器控制中间母线电压,牵引四象限控制变压器次边电流;ACU从变压器原边接收能量保持负载正常工作。
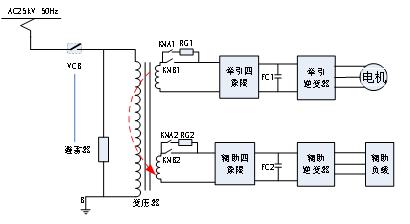
图6 过分相无电区
Fig.6 Excessive phase -free zone
状态5:状态5为机车进入B相供电臂下,主断断开,此时机车收到过分相结束信号,牵引四象限控制虚拟电网电压幅值和相位向分相区后的实际电网电压幅值和相位进行调整,在此过程中辅助逆变器采用的构造电网电压的幅值和相位也需要同步调整。
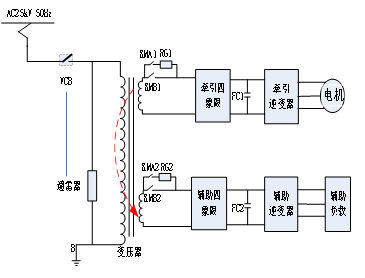
图7 过分相结束且主断断开
Fig.7 overphase ends and the main break is disconnected
状态6:状态5为机车进入B相供电臂下,主断闭合,此时虚拟电网电压相位与分相区后实际电网电压的幅值和相位调整到一致时,牵引系统给网络发送合主断请求,主断闭合,但此时牵引逆变器仍处于整流状态。
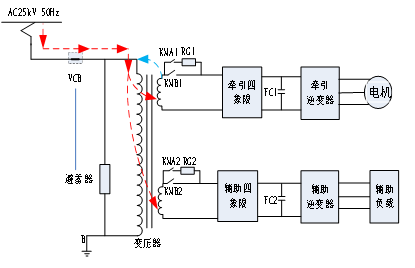
图8过分相结束信号且主断闭合
Fig.8 over-phase end signal and main shutdown closed
状态7:牵引系统自动转入过分相前的状态,辅助系统再次从电网上取电进行工作。ACU转入正常工作模式,TCU退出过分相模式(逆变器退出中间电压控制,牵引四象限由控制变压器次边电流转入控制中间电压)。
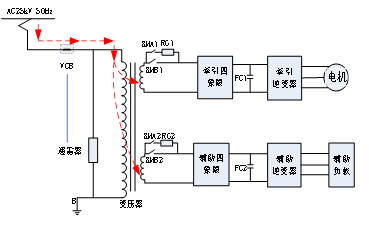
图9 过分相结束恢复受电弓供电
Fig.9 restoring power to the pantograph at the end of the phase
根据上述分析,过分相辅助不间断供电过程如下:
表1过分相状态变化
Tab1 excessive phase state changes
|
状态 |
机车 位置 |
VCB 状态 |
牵引 四象限状态 |
辅助 四象限状态 |
|
1 |
A相供电臂 |
闭合 |
逆变(整流切至逆变) |
整流 |
|
2 |
A相供电臂 |
闭合 |
逆变(同步信号Ua) |
整流 |
|
3 |
A相供电臂 |
断开 |
逆变(同步信号Ua) |
整流 |
|
4 |
中性区 |
断开 |
逆变(同步信号Ua) |
整流 |
|
5 |
B相供电臂 |
断开 |
逆变(同步信号Ub) |
整流 |
|
6 |
B相供电臂 |
闭合 |
逆变 |
整流 |
|
7 |
B相供电臂 |
闭合 |
整流(逆变切至整流) |
整流 |
3 过分相控制
机车过分相时,ACU根据机车过分相预告信号和TCU给定的指令信号从牵引网电压相位切换到牵引四象限模拟网压相位,同时牵引四象限由控制中间模式转为控制原边感应电压模式;出分相时,ACU根据机车过分相结束信号和TCU给定的指令信号从牵引四象限模拟网压相位切换到牵引网电压相位,同时牵引四象限由模拟网压相位切换到牵引网电压相位,流程如下:
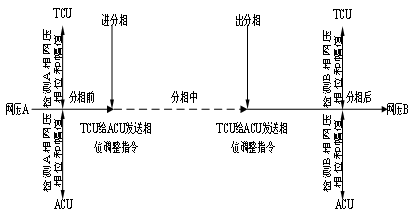
图10 过分相控制流程
Fig.10 over-phase control flow
为保证辅助系统与牵引系统过分相时,网压相位同步,在过分相时,采用预设相位累加方式实现相位同步控制技术,该技术首先是在机车进入分相区前,由牵引系统向辅助系统发送第一预设相位,牵引系统和辅助系统均按照第一预设相位进行相位信号累加;进入分相区后,牵引系统根据构造的虚拟网压相位向辅助系统发送第二预设相位,此时辅助系统按照第二预设相位进行信号累加;出分相进入电网区后,牵引系统向辅助系统发送第三预设相位,此时牵引系统和辅助系统按照第三预设相位进行相位信号累加,直至相位与电网相位一致,系统退出虚拟网压控制,采用电网电压控制。控制流程图如下:
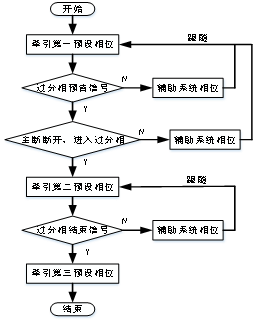
图11 过分相不断电相位同步控制
Fig.11 over-phase uninterruptible phase synchronous control
3 试验验证
为验证过分相不间断供电时,辅助系统和牵引系统的相位同步情况,以某主辅分离的机车牵引变流器为试验对象,进行过分相辅助不间断供电试验,试验系统如图12所示。试验设置条件如下:牵引变流器工作在制动工况,牵引电机转速1800r/min,制动功率1000kW,辅助负载功率230kV;系统稳定运行后,断开主断器,模拟过分相,此时辅助系统按照牵引系统预设的相位进行同步,保证牵引、辅助在分相区相位一致。试验结果如图13所示。

图12过分相辅助不断电试验系统
Fig.12 testing system of over-phase assisted UPS
(a)断主断及过分相时刻
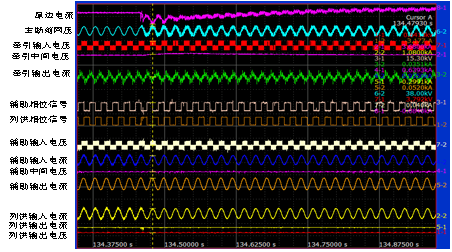
(b) 合主断时刻
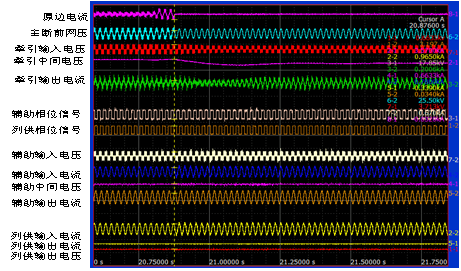
图13过分相辅助不断电试验波形
Fig.13 waveform of over-phase assisted UPS
整个过分相过程中牵引、辅助输入电压、电流比较平稳,未出现较大的冲击与畸变,无任何保护与故障发生,辅助输入电压相位始终跟随牵引系统预设相位,辅助系统输出电压、电流稳定,未发生停电。
为进一步验证控制策略的正确性,选择实际的电力机车在线路上进行了辅助过分相不间断供电试验。如图14所示,从试验结果看,机车过分相时,整车在收到过分相预告信号后,将过分相信号通过网络传递给牵引系统,牵引系统收到该信号后,开始从牵引状态向微制动状态切换,并在整车进入分相区前完成微制动,从而实现通过牵引电机发电-功率模块能量回馈-变压器能量耦合-辅助供电完成过分相不间断供电。同时从整车不间断供电过程观察,牵引系统过分相时网侧无大电压、大电流,且辅助系统在过分相期间始终跟随牵引虚拟相位,过分相结束后自动切换为实际网压信号,满足整车的过分相不间断供电应用。
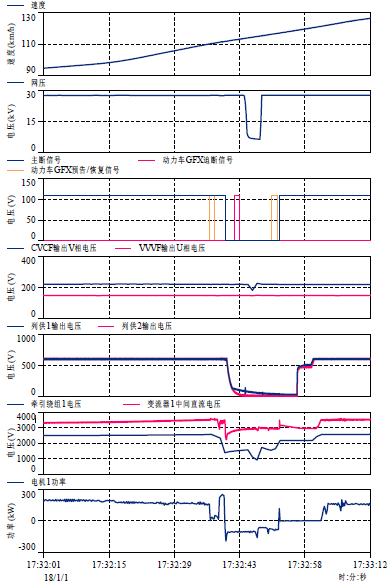
图14 整车过分相试验
Fig.14 vehicle overphase test
4 结论
本文在分析基于变压器次边绕组独立供电的辅助系统过分相不间断供电工作机理基础上,采用虚拟预设相位同步控制技术降低了过分相时出现的网侧大电压和大电流,通过地面试验和整车实际试验验证了控制技术的可靠性,为整车采用该技术进行辅助不间断供电提供了基础。
参考文献
[1] 胡景瑜,徐广伟,刘建城等.独立绕组供电变流器过分相不间断供电技术研究[J].控制与信息技术,2020,3(3):68-72.
[2] 向念文,徐城林,邵冰冰等.群组列车牵引供电系统过分相合闸过电压特性分析[J].电力工程技术,2025,44(01):50-59.
[3] 赵卫,刘学增,刘军等.HXD3系列机车自动过分相故障分析与处理[J].铁道机车与动车,2024 (12):46-48.
[4] 柴峰.列车过分相过电压分析与治理措施探讨[J].电气化铁道,2024,35(05):16-19.
[5] 李哲,刘忠烨,张冰等.电力动车组过分相控制方法优化研究[J].铁道机车与动车,2023(11):18-21.
[6] 李永宗.CR200J型动力集中动车组过分相技术分析与建议[J].电力机车与城轨车辆,2023,46(04):117-120.
[7] 吴俊博,韩枫,叶锋.列车自动过分相牵引卸载的优化控制方案[J].技术与市场,,2023,30(05):67-68+72.
![]()






共0条 [查看全部] 网友评论