


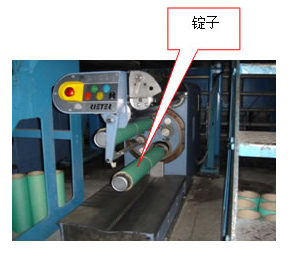
一 设备概况
FDY纺机为定长高速化纤全牵伸卷绕设备,整个设备由导丝部分及卷绕头部分组成,卷绕头部分技术要求为恒定线速度及恒定张力收卷, 适用于涤纶、丙纶、锦纶POY丝或工业丝的卷绕成型。两台变频器分别控制锭子进行收卷,在从动运转的摩擦辊上安装用以速度检测的光电传感器,作为线速度的反馈信号。为维持所需张力,线速度在4200米/分左右,线速度精度要求在1‰以内。设备动作过程中要求完成锭子的自动切换及卷绕作业。
* 设备参数:
永磁同步电机: 2P 270Hz
三相220V交流输入
额定电流15A
速度传感器: 4p/r 电压输出形式
摩擦辊直径: 126mm
* 关于速度传感器
三相220V交流输入
额定电流15A
速度传感器: 4p/r 电压输出形式
摩擦辊直径: 126mm
* 关于速度传感器
PG脉冲输入范围为50-2048p/r,测速传感器为4p/r。以cd156所设定的数值进行内部倍率换算。
* 关于逻辑控制的切换
以一台PLC作为核心控制单元,控制v/f与PID,升速及换轴等信号的逻辑切换,并以PLC接收的传感器信号经计算转换后作为线速度的显示。

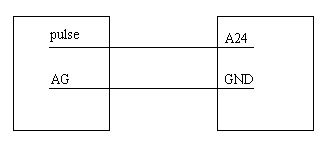
该速度传感器为电压输出,电压幅值在 DC13V左右,其接线方式如下:
二、系统构成
图1 控制结构图
关于线速度恒定控制
1、 随着纱锭卷径的增加,以PG反馈来进行PID模式控制,获得恒定线速度。
Cd071=3 选择内置PID控制模式
Cd120=99 选择以PG作为PID控制模式的反馈信号
Cd155=1 选择PI的正负增益功能
Cd071=3 选择内置PID控制模式
Cd120=99 选择以PG作为PID控制模式的反馈信号
Cd155=1 选择PI的正负增益功能
如下图,输入变频器的运转指令,V/F控制结束,开始PID控制,指令频率与反馈频率的偏差值经过PID运算,输出频率让反馈信号跟踪指令值不断变化,实现恒定线速度自动过程控制。考虑到在收卷的工艺过程中,随着卷径增大,角速度W的减小,正负偏差的调节量不同,通过软件用户化功能,引进PI的正负增益功能,达到优
2、增加卷绕曲线的控制
在线速度的控制过程中,将卷绕速度预测的图形运转作为基本控制,用以减小PID的补偿量,使控制过程更早地趋向于稳定。
只要事先根据工艺要求输入设定卷绕开始频率、结束频率、卷绕所需时间,作为对卷粗现象的输出频率预测图形,进行自动计算。
可以预先设定4种图形,通过外部端子信号予以选择。
只要事先根据工艺要求输入设定卷绕开始频率、结束频率、卷绕所需时间,作为对卷粗现象的输出频率预测图形,进行自动计算。
可以预先设定4种图形,通过外部端子信号予以选择。
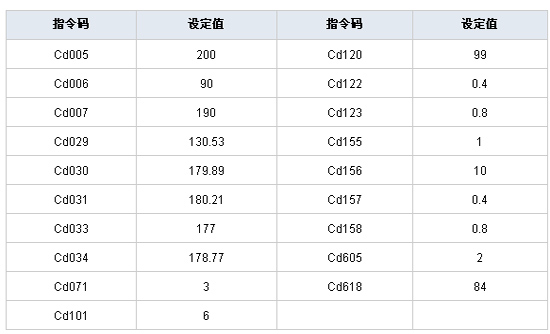
三、参数设定
四、结束语
本系统采用SAMCO-vm05作为驱动单元,提供了类似之高速卷绕设备的完美解决方案,具有以下优点:
1.目标速度在运行中可根据张力信号的大小予以调整
2.PID过程控制与PLC逻辑控制的有效结合,依据工艺要求,完成多档速及控制模式的切换,使复杂的控制变得简单
3.内置PID与卷绕曲线的结合,使控制精度稳定在1‰以内
4.控制集成度高,依靠变频器自身构成速度闭环,无需额外调节器。
5.稳定可靠,设备维护量小
2.PID过程控制与PLC逻辑控制的有效结合,依据工艺要求,完成多档速及控制模式的切换,使复杂的控制变得简单
3.内置PID与卷绕曲线的结合,使控制精度稳定在1‰以内
4.控制集成度高,依靠变频器自身构成速度闭环,无需额外调节器。
5.稳定可靠,设备维护量小




共0条 [查看全部] 网友评论