


一、引言
岸桥是港口码头前沿装卸大型散杂货的通用港口装卸起重机,在各大海港、内河码头都广泛使用。随着港口自动化水平的提高,交流变频调速技术在门机中的应用非常普遍,如图1所示为国内某港口岸桥。

图1 港口岸桥
岸桥具有大惯性、四象限、速度快的运行特点,既要满足频繁的起停、制动,显著的振动与冲击,又要保证恒转矩平滑调速,弱磁高速时的满功率输出,并且在低频、基频与高频都必须具有足够的过载倍数等要求。此外,岸桥涉及到安全方面的问题,对变频器的可靠性与稳定性也有着非常高的要求。
本文以港口岸桥为例,说明了英威腾CHA100四象限变频器在岸桥中的应用特点。
二、港口岸桥电气系统结构特点
岸桥主要传动机构由起升、大车、小车、俯仰机构等组成,各机构均采用交流变频方式驱动。
起升机构和大车机构共用两个CHA100系列800KW逆变器,小车机构和俯仰机构共用一个CHA100系列400KW逆变器。变频方式为交-直-交变频,主电气系统如图2所示,控制拓扑如图3所示。
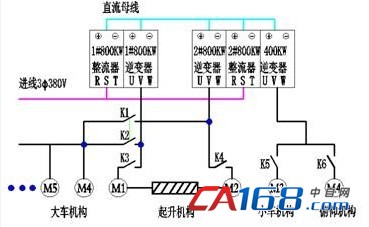
图2 主电气系统
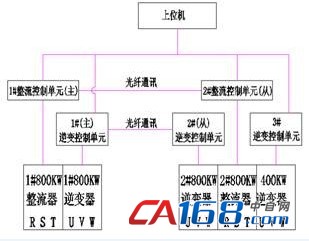
图3 整流与逆变控制拓扑
进线电源经过两台CHA100系列800KW的PWM整流器为四个机构的逆变器提供直流母线电源,1#与2#PWM整流器采用主从控制,PWM整流器之间通过光纤通讯,四个机构的逆变器均挂在直流母线上,可以实现机构与机构之间的能量循环,也可以将机构的能量回馈至电网。
起升机构和大车机构采用“先到先服务”原则,在一个机构速度完全为零的时候,才允许切换到另一个机构。小车和俯仰采用“先到先服务”原则,在一个机构速度完全为零的时候,才允许切换到另一个机构。
起升机构由两台交流电机驱动,两台电机之间采用硬连接共同驱动卷扬机,分别由1#与2#逆变器驱动,两台逆变器均采用矢量闭环模式,参与位置控制和速度反馈的增量编码器的数值送给变频器,上位机PLC通过通讯控制1#逆变器,2#逆变器由1#逆变器控制,1#与2#变频器为主-从关系,采用功率均衡模式控制。
大车机构由多台交流电机驱动,由1#与2#逆变器并机成1600KW的逆变器驱动,并机后控制模式采用V/F模式,上位机PLC通过通讯控制1#逆变器,1#与2#变频器为主-从关系,采用并机模式。
小车机构由一台交流电动机驱动,由400KW逆变器驱动,采用矢量闭环控制模式,参与位置控制和速度反馈的增量编码器的数值送给变频器,上位机PLC通过通讯控制该台逆变器。
俯仰机构由一台交流电动机驱动,由400KW逆变器驱动,采用矢量闭环控制模式,参与位置控制和速度反馈的增量编码器的数值送给变频器,上位机PLC通过通讯控制该台逆变器。
1#与2#逆变单元之间的功率均衡模式与并机模式根据各机构之间的逻辑关系由上位机PLC控制实现全自动切换;K1~K6接触器用于控制各机构之间的主电源切换,PLC根据各机构之间的逻辑关系控制K1~K6接触器,完成各机构之间的自动切换。
三、现场情况
现场中PWM整流器如图4所示,各传动机构的逆变器如图5所示。

图四PWM整流器

图五各机构逆变器
岸桥工作时,由于采用CHA100四象限变频器,各机构电机减速时的能量可以回馈至电网,此外还降低了整套变频器对电网的污染;各逆变器之间采用共直流母线方案,在机构联动时,联动机构之间的能量也可以进行循环,不仅节省了电能,而且可以缩减各逆变器的加减速时间,提高了港口的生产效率。
四、结束语
英威腾CHA100四象限变频器采用公共直流母线结构、高性能矢量控制技术、PWM整流及能量回馈技术,不仅满足了岸桥的各项高性能参数指标,也达到了港口机械的安全可靠及作业繁忙的要求。经过在该港口岸桥两年多的正常运行,证明了英威腾CHA100四象限产品在性能、稳定行、可靠性方面都完全能满足大型港机的要求,在港口装卸、船舶制造等多种行业的起重设备上将有广泛的应用前景。
参考文献:
[1]张登山,李华德.三电平双PWM变频调速系统研究.电气传动,2003(4)
[2]李方圆,变频器行业应用实践. 北京:中国电力出版社,2006
[3]张崇巍,张兴.PWM整流器及其控制,北京:机械工业出版社,2003
[4]《CHA100系列四象限矢量变频器说明书》 深圳英威腾电气股份有限公司




共0条 [查看全部] 网友评论