


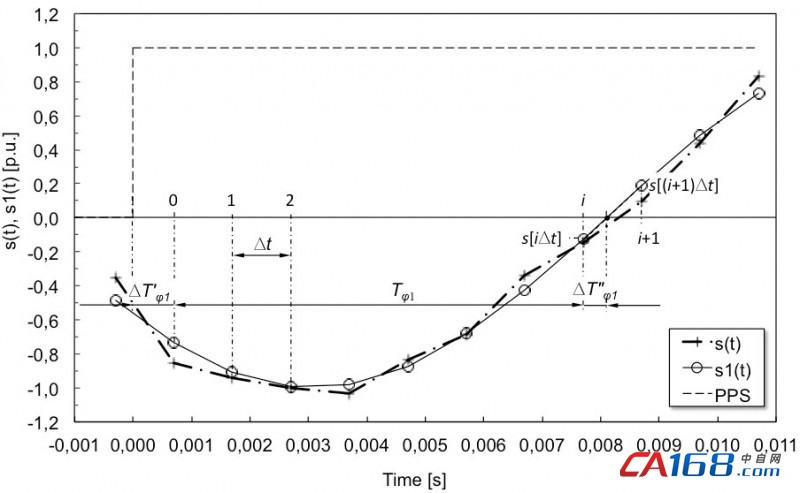
图1:同步相量估计:重构信号s1(t)和相位重定义
"我们使用LabVIEW对FPGA进行编程,实现了基于GPS时间基准的精确时间同步。LabVIEW Real-Time模块也使我们能够开发精确的同步相量估计算法。"
- M. Paolone, UNIVERSITÀ DI BOLOGNA
挑战:
创建高级相量测量单元 ( PMU ),以确定配电网络的运行进度,并改进配电网络为主动式智能电网。
解决方案:
开发基于NI CompactRIO硬件、NI LabVIEW和LabVIEW Real-Time模块的高性能PMU。其中NI LabVIEW用于现场可编程门阵列 ( FPGA ) 级编程,以实现基于全球定位系统 ( GPS ) 时间基准的高精度时间同步,LabVIEW Real-Time模块用于开发精确的同步相量估计算法。
由被动式向主动式的演变使配电网络的运行程序发生了巨大的变化,尤其是在实时监测网络时。我们需要使用先进的智能监测工具来快速可靠地估计这些网络的实时状态。这一领域最有前景的技术之一就是基于PMU的分布式监测。
同步相量估计算法均基于离散傅立叶变换 ( DFT ) 应用于代表网络节点电压和/或分支电流波形的准稳态信号。我们可以将这些基于DFT算法分成用于执行递归和非递归更新的单周期DFT估计函数和小数周期DFT估计函数。我们创建了一个DFT算法,使我们可以在主动式配电网络中使用PMU,而且即使存在失真信号波形和机电暂态(即频变信号),也可在特定范围内保持同步相量的测量精度。
与输电网络相比,主动式配电网络的特性是线路长度较短和输电量有限。使用总线电压同步相量方法来判断网络状态时,这两个特性就使得总线电压相量之间的相位差非常小(一般在几十毫弧度或更低)。这些特性要求PMU设备具有远低于IEEE C37.118规定限值的同步相量相位不确定度。配电网络的失真电平远高于输电网络。此外,即使与主输电网络隔离,主动式配电网络也可以运行。因此进行隔离和重新连接操作时,PMU就为配电网运营提供很大的支持。但是由于额定网络频率偏差通常不可忽略,使用PMU来监测机电暂态可能会导致对同步相量相位和频率的估计不正确。
同步相量估计算法
基于DFT的传统同步相量估计算法通常直接对以几千赫兹采样的信号进行DFT,再根据DFT输出执行同步相量测量。另一方面,我们的算法虽然仍基于DFT,但采用的是一个两步骤方法,其中第一个步骤是对输入信号进行DFT分析,第二个步骤是对与基频信号对应的重构时域信号进行时域分析。第一步的独特之处在于它采用本文提出的方法来识别基频信号。该算法在高采样频率下(例如,100千赫)可提供准确的结果。下面简要介绍一下同步相量估计算法。
同步相量估计算法包含以下三个步骤:1. 在80 ms(即50 Hz四个周期)的时间窗口 (T) 内对三相电压采样,从UTC- GPS脉冲每秒(PPS)波前(通常为1或10 PPS)对应的时间开始。2.将基频信号重构为正弦信号,正弦信号的频率为特定单一频率窗口ΔF(也就是f0±ΔF,其中f0是指电网频率的额定值)中某个值。我们使用LabVIEW Real-Time模块和CompactRIO实时微控制器来实现这一步骤。3.以重构的基频信号波形为基准,估计同步相量的振幅、相位和频率。我们使用LabVIEW Real-Time模块和CompactRIO实时微控制器来实现这一步骤。
图1总结了用上述过程所获得的信号分析。其中虚点线表示用于估计同步相量的通用失真信号,连续实线表示时域重构的基频信号,虚线表示PPS信号。
PMU原型
我们在配备了3百万门FPGA的NI CompactRIO嵌入式实时微控制器上实现同步相量估计算法。我们使用NI9215 C系列模块,以±10 V的动态信号输入和100 kHz的采样频率对电压波形进行采样。 UTC-GPS时间帧由时间同步不确定度为100 ns的S.E.A GPSIB移动模块提供。我们使用NI9401数字I / O模块作为计数器来执行PPS前上升沿(由GPS装置提供)和数字化波形的第一个采样之间的测量。
FPGA将PPS的数量发送给GPS设备,GPS设备生成PPS信号发送到NI9215和NI9401。这些连接触发启动PPS前沿(持续时间与观测时窗T相对应)对应的波形采样。同时,发送到NI 9401模块的PPS前沿触发FPGA计数器开始以FPGA时钟频率运行,对于系统所采用的硬件,FPGA时钟频率为40 MHz。该计数器在采样波形的第一个采样处停止运行,进行计算(参见图1)。然后采样数据以及GPS时间标记插入到DMA FIFO存储器,并由实时微控制器进行检索,以执行同步相量估计算法。 PPS的数量对应于每秒同步相量估计的数量。
PMU实验表征和结论
实验表征以具有频率恒定的频谱分量的周期信号为基准。我们将NI PXI机箱连接至NI PXI任意波形发生器、NI PXI定时和同步模块、NI PXI高精度数据采集模块以及NI PXI高性能嵌入式控制器,生成一个基准信号。我们分析了两种情况:单音信号(50赫兹)和失真信号。对于失真的信号,我们生成的基准信号的频谱分量等于标准EN50160规定的限值。表1总结了PMU的不确定性,证明所开发的设备可兼容主动式配电网络应用的要求。
以下是一个较为完整的实验表征描述,表明了PMU原型的性能不会受到频率不断变化的信号的影响,频率不断变化的信号代表缓慢的机电暂态。
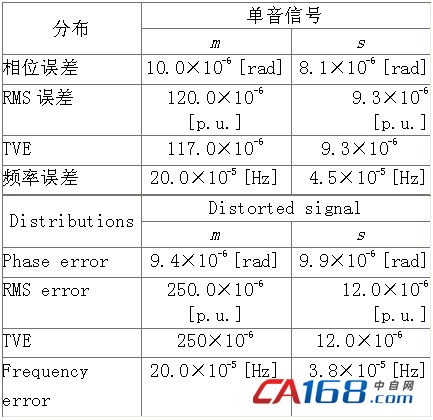
表1:以稳态条件为基准,PMU原型的误差分布平均值和标准方差:单音信号和失真信号




共0条 [查看全部] 网友评论