


图2显示了FPGA程序框图,用于处理传感器输入信号的程序以及处理CAN通信的消息的程序。EPS反作用力输出程序和PWM生成程序分别用于产生液压执行器的控制输出信号,和将车辆速度转化为PWM波信号。
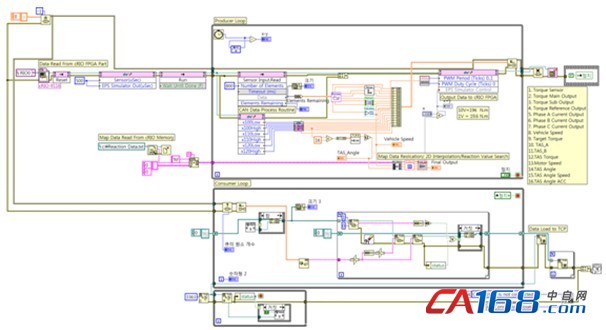
图3 实时程序框图
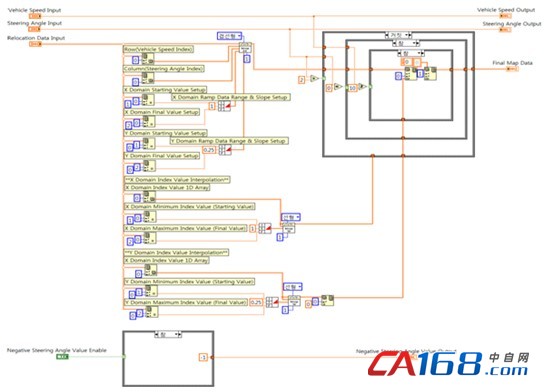
图4 2D数据插值程序框图
该系统最重要的部分就是一个可以根据从传感器采集的标准值而计算出不同地图数据的算法(见图4)。将输入参考信息与标准值相减后,数据减小了,为了保持线性,数值将从插值中提取出来。
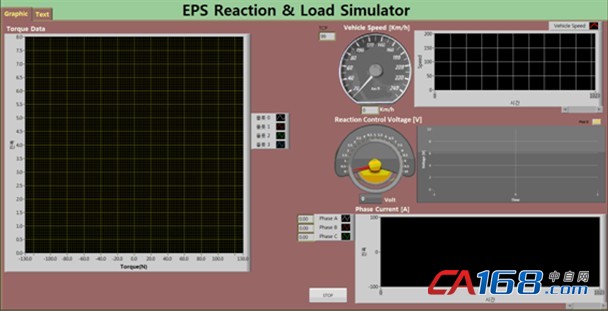
图5:主机前面板
图5显示了主机前面板,用于监测EPS仿真器和不同传感器的状态变量。其中大多数数据都将历史值显示在图表上,重要参数被分开单独显示。
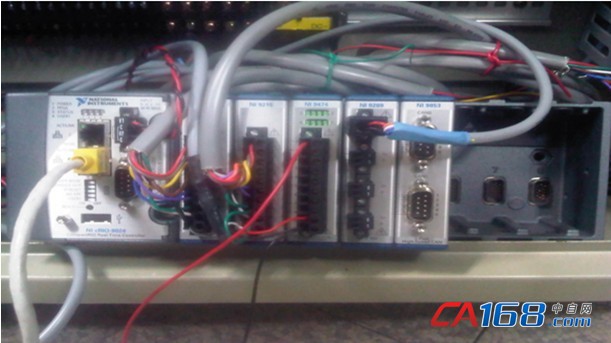
图6:CompactRIO
结论
我们有4个月的时间来开发这个应用程序,但实际仅使用了短短两个月内就完成了。我们使用LabVIEW编程完成了FPGA程序的快速功能实现和调试,而这往往需要大量时间和经验。在部署FPGA逻辑的同时,我们还实现了快速的数据采集。
该实时操作系统通过运用一个已获验证的操作系统(VxWorks),保证了高度安全、可靠的数据处理。因为目标控制的总循环时间为50毫秒,这就使得一个高效的控制效果成为了可能。这比为液压执行器提供所需的响应更快。
软件开发完毕后,将被下载至CompactRIO中独立运行,在没有PC控制下,平滑地控制反作用力仿真器。通过匹配整车级别的反作用力力矩数据,我们可以在cRIO-9024存储器中更新不同驾驶条件下的数据,用于更准确的实现实验室级的仿真环境。因为机箱插槽的可扩展性,我们只要再添加一个模块,就可以添加出更多样化的车辆行驶工况。这意味着我们可以使用最初的CompactRIO系统设计来轻松、经济、高效地适应新变化。
使用LabVIEW和CompactRIO作为解决方案的最大优势是,只要使用简单的组合或者简单的变量变化,它就能帮助我们快速、方便、准确地建立复杂的算法。




共0条 [查看全部] 网友评论